国内外果园枝条修剪研究进程与配套设备*
2021-04-08张德学秦喜田刘学峰李青江闵令强任冬梅
张德学,秦喜田,刘学峰,李青江,闵令强,任冬梅
(1山东省农业机械科学研究院,济南250100)(2山东双佳农装科技有限公司)
我国是果树种植和水果出口大国,从20世纪90年代起,我国果树的种植面积和果品产量一直位居世界第一[1-2]。近年来,随着农业产业结构的不断调整,我国果树的种植范围和面积进一步增加。目前,林果业与畜牧业、蔬菜业同为我国农业的三大支柱型产业。果树行业的兴盛和快速发展常被视为人民生活富足的标志之一[3-4]。如今,我国果树行业已日益成为提升国家经济和提高人民收入的重要来源,潜力无限[5-6]。
果树产业的发展进程受其剪枝机械化的水平影响较大。目前,我国果园剪枝机械化水平较低,无疑阻碍了果树产业的快速发展。一方面,我国果园多处偏远地区且分布零散,多数地区还都只能采用人工剪枝作业,作业强度大、效率低;另一方面,我国果园枝条修剪机械研究起步较晚,技术水平较低,相关设备匮乏,已有设备大都存在结构不合理、通用性和适用性不强等问题,其机械化程度明显低于果园内整地、灌溉、喷药和施肥等其他作业环节[7]。为了加快果树产业的发展进程,满足国内外对于水果日益增长的产量和质量需求,果园枝条修剪机械的研发工作任重道远。
基于以上内容,笔者先从果树枝条修剪的目的和意义入手,重点分析了国内外的果园枝条修剪机械化进程与代表性机械设备,经过对比分析并结合果园实际情况总结出存在的问题,即国内枝条修剪技术水平较低、自动化程度低、通用性不强等。针对存在的问题,提出研制智能化高、通用性强、可靠性好的联合枝条修剪设备是我国果园枝条修剪机械化的重要发展方向。
1 目的与意义
目前,果树枝条的修剪作业主要有3种方式,即单支枝条修剪、整株几何修剪和个体自适应几何修剪[8]。其修剪基本原理和优缺点如表1所示。
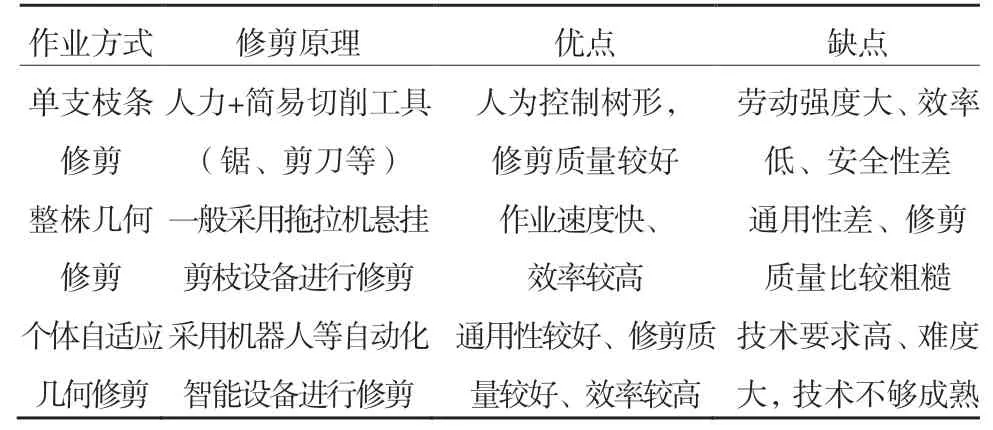
表1 果园修剪作业方式及优缺点对比
我国是全球主要的果品生产大国。近年来,我国果树种植面积和产量也在稳步提升。据统计,2018年我国果园种植面积为1 187.5万hm2,同比增长6.6%;水果产量2.57亿t,年平均增长率2.9%。
在果树的生长过程中,定时对果树的老弱枝条进行修剪是提高果实产量和质量的重要环节。过多的树冠枝叶极易造成果树早衰、大小年严重和产量降低等不良后果[9-10]。对果树枝条进行合理修剪有利于其形成合理叶幕,通过控制果树的树形来增强果园通风透光的能力,有利于调节果树内部营养物质和激素的积累和运输,实现水果的高品质和高产量,有利于果树产业的蓬勃快速发展[11-13]。
我国产量较高的几种果树依次是苹果、柑橘、梨和葡萄。然而,目前除了我国少数规模化种植的葡萄园枝条修剪的机械化程度较高外,其余大部分果树枝条修剪的机械化程度较低,依然主要采取人工作业剪枝的方式,成本高、效率低,且作业时容易出现安全隐患,十分不利于果树产业化的长期发展。近年来,随着我国产业结构的转变和劳动力的日渐紧缺,对机械设备的需要程度越发迫切。因此,研发设计适合我国果园枝条修剪的机械化设备,提高我国果园枝条修剪的机械化进程迫在眉睫。
2 国内外果园枝条修剪机械化进程及配套设备
2.1 国内外果园枝条修剪机械化状况简述
国外的果园枝条修剪机械起步较早,为了减少人力修剪造成的费时、费力、费工的缺点,从20世纪初期开始,国外一些先进国家就已经开始了果园枝条修剪配套设备的探索,先后有油锯机、气动枝条修剪机、升降平台辅助人工修剪设备、自动化枝条修剪机等诸多配套设备的面世。其发展过程如图1所示。

图1 国外枝条修剪机发展历程
具体而言,国外果园修剪机械发展较快、技术较为先进的国家有日本、韩国、德国、意大利、英国、法国、美国、加拿大等。这些国家剪枝机械根据其本国使用的果园修枝机械的大小分为3大类,如表2所示。

表2 国外果园修枝机械现状分类
与国外相比,国内的果园枝条修剪机械起步比较晚,发展也比较缓慢,主要经历了人工枝条修剪、机械与人工协同修剪和自动化修剪等过程。其具体发展历程如图2所示。

图2 国内枝条修剪机发展历程
目前,由于国内种植模式的局限性,我国果树剪枝工作大多数仍然采用传统的人工剪枝和人工机械协同剪枝作业[14];在少数规模化种植的葡萄园、苹果园里已经开始使用一些车载式的剪枝机械进行整株几何修剪;另外,还有一些高校和科研院所开始了对剪枝机器人的研究和探索,虽然离技术成熟仍有相当一段距离,但是具有自适应剪枝作业的自动化设备的问世依然值得期待。
2.2 果园枝条修剪机械化发展进程及主要配套设备
2.2.1人工辅助枝条修剪作业设备
(1)背负式果园高枝修剪机。国外果园背负式修剪机械使用较少。由于疆土较小、种植地域较复杂,日本等邻国较早使用背负式枝条修剪设备,为了解决高枝修剪的问题还研究制作了高枝背负式修剪设备。直到20世纪80年代末,我国开始了背负式高枝修剪机械的制造和使用,并很快大量应用于果园枝条的修剪,以提高果园枝条的修剪效率。
国内的背负式可调修剪机主要由动力源、修枝刀、传动机构和操作杆等组成。工作时,动力源提供动力,采用轴传动带动锯齿的转动,操作杆可以一定范围内自由伸缩,从而完成对不同高度的直径小于25 mm的果树枝条的修剪工作。根据动力源的不同,可将其分为以小型汽油机、蓄电池和气动为动力源的背负式修剪机[15]。代表机型有湖北农业大学辛继红等设计的背负式可调高枝修剪机(图3-a),以小型汽油机为动力源,最大剪枝高度6.5 m,能够适当提高修枝的工作效率,作业效果较好,成本较低,但是其工作噪声大、振动强烈、不易操作。2019年,为了减轻修剪机在工作时的噪音和振动,华中农业大学马攀宇等研制了一种背负式电动枝条修剪机(图3-b)。该机的工作效率较高、噪声小,具有较好的修枝效果,但是由于其使用的锂电池整体较重,电池的寿命较短,还无法满足实际果园剪枝作业的需求[16]。

图3 背负式果园枝条修剪机
(2)气动枝条修剪机。20世纪中叶,为了进一步提高修剪效率,欧美等国研制出了气动枝条修剪机械,比如意大利的C-AIR系列电动剪枝机和瑞士公司生产的70号电动剪枝机,其修剪直径一般都在30 mm左右[17]。目前,由于大型种植园在欧美等发达国家迅速兴起,气动枝条修剪机的使用比例也越来越少。
大约过了半个世纪,我国的一些地区开始使用气动修剪机械。然而,我国丘陵山地等偏远地区难以使用气动枝条修剪机,所以目前只在一些发展较好的地区才能见到其身影,总体使用比率较低。目前,国内的气动果园剪枝机械大都模仿国外机型,剪枝能力略显不足,一般用于直径小于25 mm的果树枝条的修剪。但是相较于手工作业,其效率已提高5倍左右。
为了解决配备空气压缩机带来的成本造价高和携带不便等问题,天津市农业机械研究所李凤鸣等设计了一种与微耕机配套使用的气动果树枝条修剪机。该机与4.9 kW的DN型微耕机配套使用,可以实现对冬枣等果树枝条的修剪。其优点在于可实现一机多用;以微耕机替代空气压缩机来降低成本;工作振动降低,枝条修剪的稳定性得以提高。缺点在于多人作业时可能会因气动附件与主机的缠绕而影响该机的作业灵活性和修剪效果[18]。
(3)升降辅助剪枝平台。升降平台是为了方便果农进行高枝修剪作业而设计的修剪辅助装备。20世纪60年代开始,美国就已改进出适用于果园的升降平台车,采用液压系统完成升降并作用于高空枝条修剪和果实采摘作业。由于种植模式和地域不同,欧美地区多以四轮自走式果园作业平台为主,采用伸缩式、剪叉式、阶梯式和折臂式等升降方式[19],其自动化程度和作业效率较高、作业效果较好,大多适合规模种植的大型果园,但因其体型较大、价格昂贵,不适合我国零散种植的果园;日本果园种植地域与我国相似,主要以小型、轻便的履带式升降平台为主,具有一定的借鉴意义。图4-a为欧美地区常用的一种剪叉轮式液压升降平台,具有移动灵活、结构稳固和升降平稳等优点。

图4 自动升降辅助剪枝设备
与国外相比,国内对于升降平台的研究起步较晚,21世纪初期才开始使用,且现有产品大多是对国外产品进行仿制和小的创新改进,除了实现辅助剪枝外,有的机型还可实现采摘和运输功能。根据行走方式,可分为牵引式、履带式和轮式3种。与日本相似,我国目前多以小型履带结构升降平台为主。代表机型有德州嘉田机械有限公司生产的小型履带自走式果园升降平台(图4-b),可连接2把气动剪共同剪枝,一机多用,提高作业效率;但该机工作稳定性不佳,举升时的可靠性还有待提高。山东农业大学李强等设计的履带自走式果园采摘和剪枝作业平台(图4-c),采用液压和电动系统来控制作业平台的升降,可以较好地完成枝条修剪和果树采摘2项工作。但该机还不够成熟,平台围栏还需根据实际情况进行优化[20]。
综合而言,液压系统的使用能够提高举升时的稳定性,是举升平台辅助举升的有效动力支撑,同时,随着科技的不断发展,果园升降平台正向着机、液、电不断融合,采摘、剪枝、运输、喷药等功能集于一体的多功用型机械发展。
2.2.2半自动车载果园枝条修剪设备
国外发达地区的果园大多都采用规模化的农场种植,采用单支修剪技术效率过低、不利于果园产业的快速发展。车载式果园枝条修剪设备是实现规模化种植果树枝条快速整株几何修剪的主力设备,该系列修剪设备主要包括往复割刀式枝条修剪设备、转刀式枝条修剪设备和锯齿圆盘刀式枝条修剪设备[21]。
(1)往复割刀式果园枝条修剪设备。往复割刀式枝条修剪机,主要由机架、切割器和液压系统组成。其中关键部件切割器一般由一组往复运动的动刀片和固定的定刀片组合而成。工作时,液压油缸通过控制切割器的高度来控制切削高度。该类修剪机械适合修剪矮化密植栽培的果树,尤其适合葡萄、苹果等枝条的修剪作业,具有剪枝效率较高、剪枝效果较好和消耗功率小等优点[22]。
国外的往复割刀式枝条修剪机械主要用于中小农场经营的果园,使用较为广泛。图5-a所示为意大利制造的BF80型悬挂式枝条修剪机,包括2个竖切割部装和2个横切割部装,油缸控制切削部装的升降,马达控制切削刀的切割速度。其主要用于葡萄园枝条修剪作业,可实现双行葡萄藤枝条的修剪。

图5 往复割刀式果园枝条修剪机
国内的机型与国外类似,机型较小,结构更加简单,可靠性和通用性不如国外机型好。新疆工程学院阿尔孜古丽设计的一种立架葡萄的往复式割刀修剪机,主要用于葡萄园单侧葡萄藤的修剪;新疆农业大学龙魁等设计的往复式葡萄剪枝机(图5-b),可用于规模种植的葡萄、苹果、梨等果树的枝条修剪作业。该机采用液压系统提供动力、平行四杆机构的手动仿形机构调节间距、往复割刀式切割刀修剪枝条,能够实现对果树单侧枝条的修剪作业。其优点在于简单实用、工作效率较高,成本较低;缺点在于机架稳定性和适用性较差、作业速度较慢[23]。
(2)转刀式果园枝条修剪机。转刀式枝条修剪机械主要结构是一组切削刀组成的切削部装,切削部装一般通过连接架挂接在拖拉机的前部,采用拖拉机的液压系统或者自配的液压系统来实现切削刀的旋转切削作业和切削位置调节动作。具有运转平稳、可靠性好、切割效果好等优点。
国外的转刀式果园枝条修剪机的发展较为迅速,样式较多,一般用于像葡萄藤等枝条较软的规模化果树枝条的修剪作业。切割刀一般采用L或者C型的排布,以实现特定树冠形状的整株修剪。国外的机型一般适合大中型农场经营模式,尺寸较大、布置刀较多,作业效率较高,根据行走类型主要分为履带自走式和拖拉机前悬挂式,如图6-a、b所示。
国内的转刀式果树枝条修剪机大多是吸收了国外的先进技术,针对国内规模化果树(多见葡萄)种植的农艺要求设计的,切割刀一般采用L型或门式的排布。其一般前悬挂于拖拉机前托架上,液压系统提供动力,借助一排交错布置的切割刀高速旋转切断果树枝条。代表机型有山东省农业机械科学研究院设计的PJ系列转刀剪枝机,如图6-c、d、e所示,包括单侧枝条修剪机、两翼式枝条修剪机和龙门式枝条修剪机,该系列剪枝机均采用液压系统提供动力,液压马达控制转刀旋转、液压油缸控制切割高度和宽度,分别实现对单行果树一侧和顶部、2行果树一侧和顶部以及单行果树枝条两侧和顶部的枝条修剪作业,剪枝高度为400~2 000 mm(可调节)。此外,该系列机型还增设了防碰撞臂装置,能有效防止刀架遇障碍物后切割刀损坏。田间试验和销售数据表明,龙门式的枝条剪枝机适应性更强、作业效率也更高,更受农户喜爱。

图6 转刀式果园枝条修剪机
(3)锯齿圆盘刀式果园枝条修剪机。该系列枝条修剪设备主要装在拖拉机的前部,可以通过连接架或者前装载与拖拉机相连,主要由上下交错设置的锯齿式圆盘刀(一般设置3~6个)组成的切割器、连接机架和液压系统组成[24]。工作时,液压系统控制机架的转动和刀盘的旋转动作,可以实现对苹果、梨等较硬果树枝条的修剪。
国外的机型个头较大,圆盘刀布置数目较多,技术也相对成熟,代表机型有意大利设计生产的FN300N型锯齿圆盘刀式枝条修剪机(图7-a)和FL200P型锯齿圆盘刀式枝条修剪机(图7-b),其切割效率和作业稳定性较好。
国内的圆盘锯式果树枝条修剪机一般采用与转刀式相同的工作原理,使用圆盘锯代替了转刀,利用圆盘锯的高速转动切割果树枝条,从而实现对苹果、柑橘、枣等果树枝条的修剪作业。代表机型有新疆石河子大学刘玉冬等设计的适用于理想状态下枣枝修剪的仿形枝条修剪机(图7-c);常军翔等设计的可以满足不同交替结果修剪模式和各异环境下的柑橘果园的枝条修剪要求、实现柑橘枝条的齐切修剪作业的双边齐切柑橘修剪机[25](图7-d)。当然,目前国内这些机型只处于样机阶段,仍不够成熟,还需不断优化。

图7 锯齿圆盘刀式果园枝条修剪机
2.2.3自动化修剪设备
自动化修剪设备是集成3D模拟、激光扫描、图像采集处理和定位导航等先进技术,通过场景模拟和数据分析,借助更加智能化、自动化的设备(如机器人)来完成修剪作业的先进的枝条修剪作业方式[26]。日本、美国等发达国家对剪枝机器人的研究起步较早、技术也比较先进,但是由于果树枝条形状较为复杂,目前专门针对果园枝条修剪的机器人的研究还不多,多数成果集中于森林等立木树枝修剪的机器人的研究(图8-a)。2008年,一种新型的攀爬式修剪机器人在日本问世,该机器人结构轻巧、方便在树干上攀爬修枝[27];后来,日本SEIREI公司生产出了可遥控的攀爬剪枝机械[28]。当然这些机型还只能用于立木修剪,且对立木的直力度还都有着不同程度的要求。

图8 枝条修剪机器人
国内农业机器人尚处于起步阶段,进入21世纪才开始从事剪枝机器人的研究和开发[29]。与国外相似,在立木剪枝机器人的研究上取得了一定的进展,但是在树形比较复杂的果树修枝作业机器人的研制方面还没有太多研究成果。代表机型有山东农业大学邵金祥等设计的爬树修枝机器人,主要完成对直立树木枝条的修剪,但并不适用于具有复杂形状的果树枝条的修剪[30];华南理工大学黄彪设计的一种枇杷剪枝机器人(图8-b),实现了对枇杷枝条的修剪及粉碎处理,并可将粉碎的枝条还田,从而实现资源的循环利用[26]。但由于缺乏经验,该机的设计还不够成熟,实用性和可靠性不高。
3 存在问题与建议
3.1 存在问题
(1)果园剪枝机械化程度过低。由于我国果树种植位置和模式的局限性,造成了多数地区仍采用手工剪枝亦或借助简易的修剪机械进行枝条修剪;发达一点的地区能够使用气动或电动的修剪机械帮助修剪;少数大规模葡萄园、苹果园等开始使用拖拉机悬挂式的半自动剪枝机械;还未见全自动的机械用于我国果树枝条的实际修剪,这样无疑降低了剪枝效率,不利于果园机械生产的长期发展。
(2)可靠性高的先进技术和设备匮乏。由于我国剪枝机械研究起步较晚,现有的一些较为先进技术多数还处于理论研究阶段,虽有制造样机,但离应用到生产中,实现成果转化还有较远的距离。
(3)已有果园剪枝机械通用性不高、自适应能力不强[31]。已经存在的效率较高的几何修剪机械还只适用于大规模种植的现代果园,多数仅仅适用于规模化种植的葡萄园,且无法根据个体自身的生长条件分门别类地精准修剪。
(4)集成剪枝功能于一体的联合作业机械缺乏,不利于果园全程机械化的快速发展。
(5)国内对果园修剪机械的支持力度和重视程度还不够高,相关有利政策较少,研究进展缓慢。
3.2 建议
(1)积极探索更加适合我国果树产业发展的规模化种植的模式和路子,扭转人工剪枝作业和机械剪枝作业的作业比例,进一步加大对机械剪枝作业的推广力度和使用范围,积极促进在果园剪枝领域农机和农艺的融合。
(2)充分汲取国外剪枝机械先进技术,结合国内果树种植发展趋势,加快理论研究进度,尽快完成具有新型剪枝技术的成果转化,以期研制出更多实用性和可靠性皆高的果园枝条修剪机械。
(3)基于目前的研究,不断进行科学探究和技术创新,探索感应技术和虚拟剪枝技术等智能化技术与现实修剪场景的结合,逐渐将自动化修剪和自适应的精准修剪技术作为未来果园枝条修剪的一条重要方向。
(4)探索果园剪枝作业机械和诸如喷药、枝条粉碎收集以及其他作业环节相结合的多功能联合作业机械的开发和研制,这样无疑会提高我国果树的全程机械化进程。
(5)相关部门应该加大对我国果园机械发展的重视程度,不断加大对于果园剪枝机械的扶持力度和人才引进。各大高校、科研院所和相关企业应该共同协作、互通有无,积极探索提高我国果园机械剪枝技术的新方法、新路子,努力实现在果园剪枝机械领域更多的突破和创新。
4 结论
综上所述,当前,我国果园多零散分布在丘陵、山地,多数地区依然采用人工修剪或者人工配备简单修枝机械进行修剪的作业方式,剪枝机械化占比低。国外果园剪枝作业农机与农艺结合得较好,研究技术先进,多为智能化程度较高的大型机械,但由于这些设备价格昂贵以及不适应我国果树的种植模式,无法引进用于我国果园机械的修剪作业。针对目前存在的问题,我国一方面需积极探索适合我国果园生产、农机与农艺易于融合的果园种植模式,另一方面应该将提高我国果园修剪机械的机械化和自动化程度作为未来果园枝条修剪机械的重要发展方向,不断探索研究自适应能力强、自动化程度高、通用性好、多功能集成的联合修剪机械。
