基于单稳频激光的端面距离微尺寸测量方法
2021-04-07刘育彰高宏堂程银宝王中宇
刘育彰, 高宏堂, 2, 程银宝, 王中宇
(1.北京航空航天大学 仪器科学与光电工程学院,北京100191; 2.中国计量科学研究院,北京100029)
1 引 言
多波长的小数重合法可用两种不同波长的光源照射,就能测量出量块的工作长度,有效地提高了量块几何长度检定、校准的精度与效率。
对于量块测量及其衍生出的较高精度的端面距离测量,国内外的计量科学研究机构及有关高校[1~4]进行了深入的研究。利用干涉图样进行量块测量的多波长的小数重合法,使用光的半波长作为最小单位长度,具有测量原理简单,所使用的光路结构简单,测量精度高的优点,现已被广泛应用于量块测量领域,对于进行光滑端面的间距测量也是一种很好地选择。中国计量科学研究院在多波长的小数重合法进行量块测量的研究领域进行了大量的研究工作,取得了较为丰硕的成果[5~7]。
受限于多波长的小数重合法对于激光单色性要求高的技术难点,多波长的小数重合法测量原理在不配备两台及以上高度稳频激光的实验条件下难以使用。针对存在的问题,本文搭建了一种基于多波长的小数重合法的测量装置,使用单一稳频激光,实现对端面距离微尺寸的测量。为降低应用多波长的小数重合法进行端面距离测量对光源单色性的要求提供了解决方案。
2 测量原理
系统应用多波长的小数重合法原理进行端面距离微尺寸测量,以量块测量为例,测量光路采用迈克尔逊干涉仪的柯氏干涉结构。在进行量块测量时,将量块研合在辅助平晶之上,调整辅助平晶与测量系统的参考镜的俯仰与偏摆,使视场中观察到4~7条较为均匀的干涉条纹。形成干涉的光共有3个部分:即参考镜反射光,辅助平晶上表面反射光及被测量块的工作面所反射光。由于辅助平晶上表面与量块工作面之间存在大小为量块的工作长度L的台阶,在接收端观察到的干涉图样会存在级次差。被测量块放置在干涉仪之中的状况如图1所示。

图1 量块置于干涉光路中的状况Fig.1 Gauge block in the interference system
在系统中引入波长为λi的激光光源时,量块工作长度可用如下公式求得。
(1)
式中:L为量块的工作长度;Ki为干涉条纹相差级次的整数部分;εi为干涉条纹相差级次的小数部分;λi为使用的激光光源的波长;i=1,2,3,…。
视场中观测到的干涉图样如图2所示。

图2 视场中干涉图样Fig.2 Interference fringe in the field of view
图2中,中心处条纹为参考镜反射光和量块工作面反射的光形成的干涉条纹,两侧条纹为参考平晶上表面的反射光和参考镜反射光形成的干涉条纹,M为干涉条纹的宽度,m为两组干涉条纹的亮纹中心间距。
λi波长的激光照射下干涉条纹级次差的小数部分εi可以表示为:
(2)
每使用一种波长的激光进行照射,都能够根据公式(2)计算出一个小数部分的值εi,那么,由公式(1),只需求出干涉条纹级次差的整数部分Ki即可测得量块工作长度值L。
图3为使用多波长的小数重合法求量块工作长度精确值的过程示意图。
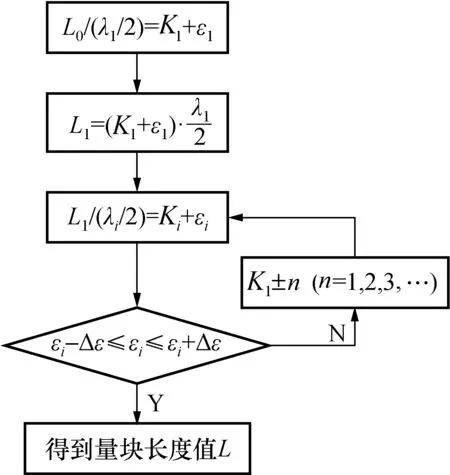
图3 多波长的小数重合法过程示意图Fig.3 counting process of the exact fractions method
图3中,L0是量块工作长度的预测值,预先由机械方式测量得到,L1是量块的估计值,Δε是理论计算的小数部分与实际测得小数部分允许的误差范围。将由机械方式预先测得量块的预测值L0代入公式(1),那么在波长λ1情况下,干涉条纹整数部分K1就可以表示为:
(3)
式(3)中:( )是取整运算符,利用K1和实际测量得到的小数部分ε1,量块的估计值L1就可以表示为:
(4)
利用L1,理论计算的小数部分εi就可以表示为:
(5)
式中:Ki=[L1/(λi/2)],i=1,2,3,…。

3 测量系统
3.1 测试系统的硬件构成
测量系统的构成如图4所示。
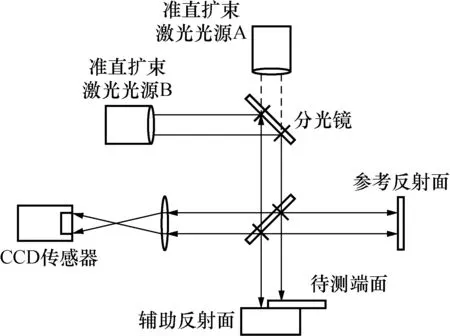
图4 系统结构示意图Fig.4 Structure of the system
基于迈克尔逊干涉仪的光路进行改进,设计了系统光路。首先,由于在系统中所使用的光源为激光光源或稳频激光光源,光源单色性好,故取消了一般迈克尔逊光路中用于白光干涉的补偿镜,简化了光路和调节步骤。使用1块卡尔-蔡司的高精度量块作为系统的被测端面组,并选用1块工作长度和体积较大的卡尔-蔡司高精度量块取代辅助平晶的作用,作为辅助反射面。由于两个平面度较高的量块可以通过大气压力和分子间束缚力的作用研合在一起,且在一定程度上保证了被测端面组和辅助反射面的平行性。将干涉图样通过透镜进行放大并通过电荷耦合器件(charge coupled device,CCD)传感器进行图像采集。
3.1.1 系统光源
系统采用了单稳频激光光源,633 nm波长的光源为波长不确定度相对较低的He-Ne激光器,这部激光器自带准直扩束系统,可以输出直径为φ=30 mm的光束。另一部光源为一部532 nm波长的碘稳频激光光源,频率不确定度为10-10级别,与实验室中的2 m线纹基准比长仪共用。由光纤引入到实验系统当中。
由于单模光纤传输损耗较小,且传输精度较高,故选择单模激光进行传输。将532 nm激光使用分光棱镜引入OZ公司的光纤耦合器之中,将定制的OZ单模光纤(芯径5 μm)接入光纤耦合器中,调整光纤耦合器的位置,使由分光棱镜引出的光束打在耦合器透镜的中心位置,精确调整光纤耦合器的俯仰,使得光纤输入端恰好处在光纤耦合器透镜的焦点位置,以确保耦合效率达到最大。经过调整,单模光纤的传输效率可达50%,系统中各反射面上的光强足以获得可被CCD传感器采集的条纹。将光纤输出端引入到输出光斑直径φ=2 mm的光纤准直镜头中,再将光纤准直镜头的输出光输入到Thorlabs的BE20-532准直扩束镜中,最终得到直径为φ=40 mm的准直光束作为系统的输入光。使用一个分光镜将两种波长的激光分别引入系统中,在使用某一波长的激光获取干涉图样时,需对另一激光光源做遮挡处理。
3.1.2 条纹采集系统
干涉条纹经一组透镜放大后,成像在CCD传感器的靶面上。系统采用低照度CCD传感器进行图像采集,CCD摄像机与实验用的计算机进行连接,采集到的干涉图像由系统的软件部分,即图像处理工具进行处理。
3.2 测试系统的软件部分
利用Matlab图像处理工具包将图像作为矩阵进行运算的特点,以图片上的像素格取代传统柯氏干涉仪中的十字分划板的刻度格作为最小分度值来测量干涉条纹宽度以及条纹间距,进而求干涉条纹级次差的小数部分。
图像处理的具体处理过程如下:
(1) 将采集到的图像转化为RGB二值图像;
(2) 利用直方图均衡算法增强图像的对比度,强化图像中的有用信息;
(3) 利用Canny滤波算法,提取各干涉条纹的边缘,获得条纹边缘的像素坐标;
(4) 利用条纹边缘的像素坐标,求各级条纹中心的像素坐标,进而求得各级条纹之间的像素距离。
按照以上图像处理步骤,利用求得的条纹之间像素距离,求各级条纹中心的像素坐标,进而求参数m和M,求得条纹级次差的小数部分。
3.2.1 图像二值化与直方图均衡
在Matlab的图像处理工具包中,对图像进行任何滤波处理的基础是将图像转化为RGB二值图像。
直方图均衡化是一种基于图像的直方图对图像的对比度进行处理滤波算法,可以在不改变图像的整体对比度的前提下,对图像局部的对比度进行增强[10,11]。图像处理系统在将CCD传感器采集的图像转化为灰度图像之后,对图像进行直方图均衡化处理,将干涉条纹边缘的对比度进一步增强,为使用边缘检测算法提取干涉条纹的边缘做准备。
3.2.2 Canny边缘检测算法
利用Canny边缘检测算法,对直方图均衡化后的二值图像进行边缘检测,提取出各级干涉条纹的边缘,至此,图像处理工作完成。由于系统中反射面的平面度等原因,干涉条纹可能会出现条纹等相位面方向不一致的状况,可能会对干涉条纹中心位置的确定带来一定的影响。这时,可以使用曲线拟合的方式,对提取到的条纹边缘进行曲线拟合,以确定干涉条纹中心位置。
3.2.3 干涉条纹中心的像素坐标与条纹间距
Matlab是将输入的图像作为矩阵进行处理的,图片默认有0~255,共256个灰度级,图片上的像素点有该点所对应的坐标及灰度值。边缘检测之后的最终输出图像为黑白二值图像,黑色部分灰度值为0,白色部分灰度值为255。选择边缘检测后得到的最终图像上的某一行并输出其灰度曲线,灰度值发生0到255的突变的位置即为干涉图像边缘的坐标。每两个边缘坐标的中点是一个干涉条纹中心的坐标。在求出两组干涉条纹的中心坐标之后,即可求得干涉条纹级次差的小数部分。
4 测量结果
图5为532 nm和633 nm波长激光采集到的干涉图样在直方图均衡化后的灰度图像。

图5 532 nm和633 nm波长激光干涉图样直方图均衡化后的结果Fig.5 532 nm and 633 nm laser interference pattern after histogram equalization
对标称工作长度为0.500 mm的量块进行测量时,使用532 nm和633 nm波长激光测得小数部分结果为0.486 3和0.111 1。
系统以标称长度为0.500 mm和1.004 mm的量块作为被测对象,各进行10组重复性实验,并使用中国计量科学研究院的线纹基准比长仪测得的量块工作长度作为量块工作长度的参考真值,测得长度的平均值与线纹比长仪测得的结果相差最多为23 nm,见表1。

表1 系统测量结果与参考真值对比Tab.1 measurement result and reference value mm
考虑环境因素,光源单色性,实验器材的机械误差等情况,分析系统测量量块工作长度的不确定度主要来源[12~16]如下:
(1) 小数测量所引入的不确定度分量。
使用图像处理方法获取干涉级次差小数部分的过程受图像像素的影响,在采集图像所用的CCD传感器像素受限的前提下,小数部分的测量可能存在偏差。
(2) 激光波长的不确定度所引入的不确定度分量。
激光器所输出的激光波长可能与其标称波长存在细微的差别,其中,532 nm波长激光器高度稳频,波长不确定度很小,甚至可以忽略不计。而633 nm波长激光器的波长不确定度水平相对较差,将引入一个不确定度分量。
(3) 进行试验时的室温对所带来的不确定度分量。
温度波动会引起被测量块发生微小的热膨胀或收缩,使量块的工作长度发生细微的变化,从而引入不确定度分量。实验室温度由空调系统进行控制,温度变化幅度较小且可以通过空调系统实时监控,可以针对温度变化所引入的不确定度分量做出量化分析。
(4) 量块的金属材料的膨胀系数所引入的不确定度分量。
在温度变化影响下,量块会发生热膨胀或收缩的形变量受量块的金属材料的热膨胀系数影响。量块的有关参数可以在量块附带的说明中查阅。针对量块的金属材料膨胀系数所引入的测量不确定度分量可以做出量化分析。
(5) 空气折射率所引入的不确定度分量。
光源的标称波长均为其所发射的激光在真空中传播时的波长,而进行实验时,由于真空环境的缺失,导致进行测量时所使用的激光波长与激光源的标称波长存在偏差,从而引入不确定度分量。
(6) 光线入射倾角所引入的不确定度分量。
系统各个反射面上的光可能并不是与反射面严格平行,而是存在一个微小的倾角,从而导致实际的测量量与量块的工作长度之间存在一个三角函数关系,量块工作面和量块所研合的辅助平晶表面可能不严格平行,光线入射倾角不同,导致条纹等相位面方向不同,这些因素都会引入一个不确定度分量。
(7) 光源引入的不确定度分量。
主要包括光源的姿态与倾斜和光纤传输所导致的波前误差。
(8)量块与参考反射面的研合厚度引入的不确定度分量。
量块与参考反射面通过空气压力和分子间作用力结合在一起,二者的结合面会存在一个分子层厚度,从而使测量结果在量块工作长度之外,还加入了结合层厚度,从而引入了不确定度分量。量块研合厚度可以在相关文献中查阅得到。
(9) 激光的波前畸变所引入的不确定度分量。
经光纤传输,准直系统的透镜作用后,输入系统中的光可能会发生波前畸变,使得参与形成干涉的光束的光程差发生偏差,进而引入一个测量不确定度分量。
(10) 量块长度变化所引入的不确定度分量。
量块在运输、保存和使用过程中,可能会发生磨损、腐蚀,使得量块的工作长度发生微小的变化,从而引入不确定度分量。
表2给出了测量不确定度的来源与不确定度分量(表2中:α为量块材料的热膨胀系数,tg为量块表面温度,d为准直扩束系统入光孔径,f为准直扩束透镜焦距),合成标准不确定度为:
(6)
式中:L为量块工作长度,单位为mm。取k=2,扩展不确定度可以线性简化为:
U=0.015 μm+0.07×10-6L
(7)
5 结 论
搭建的系统采用高度稳频的532 nm激光器和频率不确定度水平相对较差的633 nm激光器作为测量光源,利用单稳频激光和图像处理技术作为辅助手段,对干涉条纹的图像进行处理得到被测量块的干涉条纹小数,采用多波长的小数重合法计算量块工作长度L,测量工作长度较小量块的扩展不确定度可以达到U=0.015 μm+0.07×10-6L(L单位为mm)。在达到相同或类似不确定度水平的情况下,为降低应用多波长的小数重合法进行端面距离尺寸测量对于光源单色性的要求提供了解决方案。

表2 标准不确定度分量汇总表Tab.2 Components of the standard uncertainty