基于扫频源OCT 的全眼组织参数测量系统的研制
2021-04-03任天慧吴洪军王立伟李跃杰
任天慧,吴洪军,王立伟,李跃杰
(中国医学科学院北京协和医学院生物医学工程研究所,天津 300192)
0 引言
临床上很多眼科疾病会导致眼组织生物参数的改变,如先天性青光眼、闭角型青光眼、老视眼、近视眼、白内障、黄斑水肿等[1-2]。眼轴长度作为眼组织的一项重要参数,可以为眼部相关疾病的诊断提供依据[3]。在白内障摘除联合眼内人工晶状体植入手术前,需要精确测量眼轴长度,以便准确计算植入眼内人工晶状体的度数[4]。目前,我国仍有20%~40%的白内障患者术后的预测屈光力误差大于±0.50 D,其中眼轴长度测量是影响误差的关键因素[5]。此外,根据国家卫生健康委员会数据显示,2018 年我国儿童青少年总体近视率为53.6%[6]。近视程度与眼轴长度呈正相关,对儿童和青少年的眼轴长度进行监测有助于预防和治疗近视及其引发的眼科疾病[7]。由此可见,高精度眼轴长度测量在眼科疾病的预防、临床诊断和治疗中具有重要作用。
目前,眼轴长度测量方法主要有超声测量和光学测量2 种。超声测量具有价格低廉和携带便捷的优点,但是由于分辨力较低[8]、需要接触式检测和操作复杂等因素,其测量精度较低[9-10],且易损伤、感染角膜。光学测量利用光学相干技术来测量眼轴长度,具有非接触、高精度和操作简单等优势,测量结果的精确度和重复性优于超声测量方法[11-13],而且可以避免感染。但光学测量方法易受屈光介质浑浊和固视情况的影响,在眼组织病变严重或固视不佳等情况下无法获得准确的测量数据。传统的光学测量方法主要是通过时域光学相干断层扫描(time domain optical coherence tomography,TD-OCT)测量眼轴长度,这种一维光学成像生物测量方法存在扫描速率慢、无法固视等局限性[14]。经过学者们的不懈研究以及光通信技术的飞速发展,全眼光学相干断层扫描(optical coherence tomography,OCT)技术越来越成熟。目前,市面上较为先进的光学成像生物测量仪器是德国蔡司公司的IOL Master 700,其基于扫频源OCT 技术,可以在整个眼球的长度范围内进行OCT 成像,测量的眼轴范围为14~38 mm,且对白内障患者的眼轴检出率更高[15]。但是此设备价格昂贵,其对眼球局部组织的成像分辨力稍差,临床上只能用于生物组织参数测量。临床上多用于眼前节成像或眼底成像的频域OCT(frequency domain optical coherence tomography,FD-OCT)设备的探测深度多为2~3 mm,但此类成像设备无法进行全眼范围成像,不能用于眼轴长度等参数的测量。
垂直腔表面发射激光(vertical-cavity surfaceemitting laser,VCSEL)扫频激光器是近年来发展起来的一种激光器,相较于已商业化的眼轴长度测量设备所使用的传统傅里叶域锁模(Fourier domain mode locking,FDML),VCSEL 扫频激光器具有更长的相干长度和更高的扫描频率。本文设计一种基于扫频源OCT 的全眼组织参数测量系统,采用VCSEL扫频激光器为光源,可以实现从角膜到眼底的全眼范围成像,同时设计并集成了视频监视组件和内固视组件,确保测试人员能够固视,从而保证扫描光线与眼轴平行,实现对眼轴长度、中央角膜厚度、前房深度和晶状体厚度等眼组织参数的精确测量。
1 系统设计
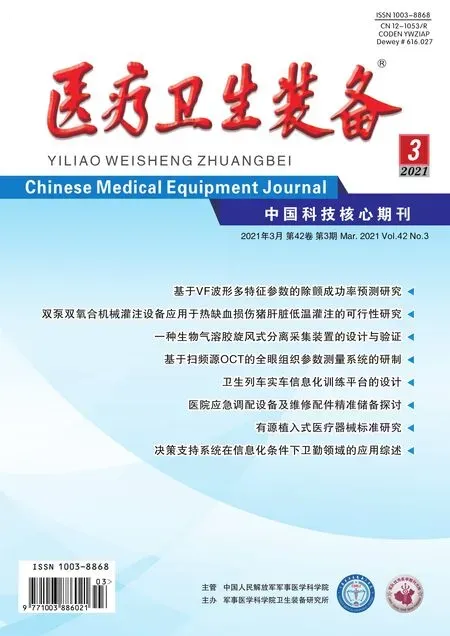
基于扫频源OCT 的全眼组织参数测量系统包括光学成像系统、内固视组件和视频监视组件,其原理图如图1 所示。
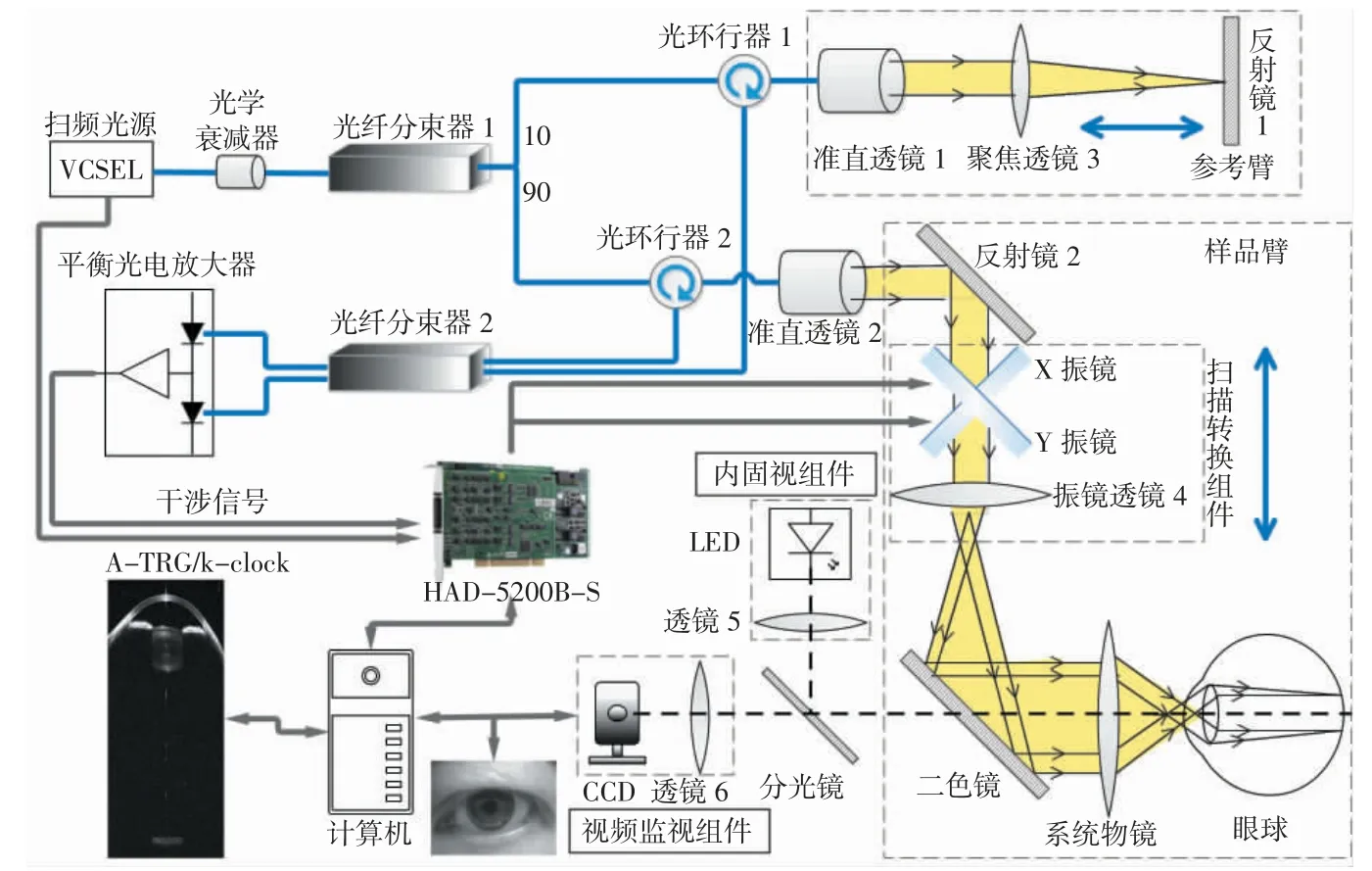
图1 基于扫频源OCT 的全眼组织参数测量系统原理图
1.1 光学成像系统设计
光学成像系统主要包括光路系统模块、信号采集处理模块和系统控制模块。其中,光路系统模块用于分光和产生干涉信号;信号采集处理模块对包含样品信息的干涉信号进行采集和处理,并在计算机上显示和存储;系统控制模块用于控制扫描与采集同步、控制扫描范围和扫描密度。
1.1.1 光路系统模块设计
光路系统模块由光源、光纤分束器、光环行器、平衡光电放大器及光学器件组成。采用Santec 公司的具有扫描频率高、相干长度长的VCSEL 扫频源激光器HSL-1 作为系统光源,该光源基于VCSEL 技术,其发出的近红外光经过分光比为90∶10 的2×2光纤分束器1,被分成同波长的2 束光,分别进入光环行器2 和光环行器1,再对应进入样品臂和参考臂。进入参考臂的光经过准直透镜1 将入射的点光源调整为平行光束,平行光束通过聚焦透镜3 汇聚到焦点上,再通过与光路垂直的反射镜1 反射回原光路,经光环行器1 射入光纤分束器2。进入样品臂的光经准直透镜2 准直后,在X 振镜和Y 振镜的反射下通过物镜聚焦投射到被测样品,并随着振镜的转动对样品进行2 个方向的光点移动,投射到样品的不同位置形成扫描(即三维扫描)。最后由被测样品反射回来的带有被测样品结构信息的光经光环行器2 与参考臂反射回来的光进入50∶50 的光纤分束器2 发生干涉,并经平衡光电放大器将干涉信号传输到数据采集卡。在光路系统中,对于高斯分布的光源,系统纵向分辨力lc计算公式如下:

系统探测最大深度zmax计算公式如下:

式中,δλ为波长分辨力;Ns为采样点数;n 为介质的折射率。本文所用光源的中心波长λ0为1 060 nm,带宽Δλ 为40 nm,平均功率为15 mW,扫描频率为25~200 kHz。根据光源参数计算光路系统在空气中理论lc为12.4 μm,在眼组织中理论lc为9.3 μm,在空气中zmax为46.69 mm。光路系统在实现全眼测量的同时保持了高分辨力的优势,对眼前节或者眼底的成像较为清晰。
1.1.2 信号采集处理模块设计
信号采集处理模块主要由数据采集卡和信号处理程序构成。平衡光电放大器将光谱信号转换成电信号并传输到数据采集卡,数据采集卡采集数据并上传至计算机进行数据处理,主要包括窗口补零、色散补偿、离散傅里叶变换、对数压缩以及减除背景噪声等操作,最后生成2D 灰度图像。数据处理流程如图2 所示,具体步骤如下:(1)将光谱信号进行模数转换生成16 bit 的二进制数据。(2)使用切趾窗函数对数据做窗口补零,以方便后续利用离散傅里叶变换快速获取样品深度信息。(3)利用色散补偿进行相位校正,以减小信号的半峰宽,提高系统lc。(4)通过离散傅里叶变换恢复样品各层深度信息,通过信号强度值的变化反映样品内部的结构信息。(5)对信号强度值取模并进行对数变换,将信号线性压缩为8 bit。(6)通过减去相对应的背景图像来减除背景噪声,以减小系统误差,提高信噪比,增强图像质量。(7)通过信号处理程序将处理好的数据以2D 灰度图像的形式在显示器界面上实时显示。
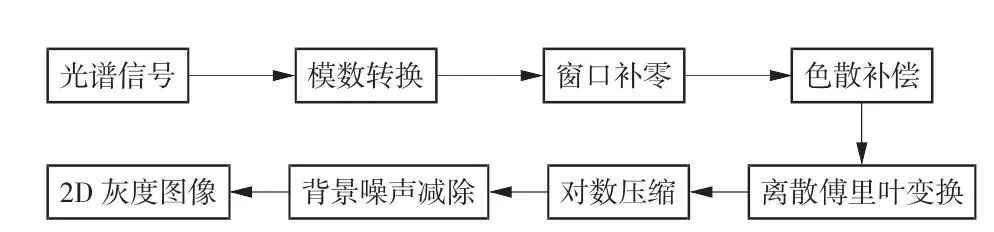
图2 数据处理流程图
1.1.3 系统控制模块设计
系统控制模块主要由计算机和控制卡组成,主要功能是控制扫描范围和扫描密度、同步系统时钟以及控制振镜驱动器进行扫描。具体如下:(1)系统扫描范围由振镜的偏转角度决定,而振镜的偏转角度由加载在驱动器上的电压控制。本系统的扫描范围为20 mm,完全满足眼组织扫描成像。系统扫描密度指的是线间隔和帧间隔,由振镜每次偏转的幅度决定,而偏转的幅度由1 个周期三角波的个数决定,对应X 方向的即为线数,对应Y 方向的即为帧数。例如线数为1 024 表示X 方向的1 个三角波上升沿共有1 024 个点,帧数512 表示Y 方向的1 个三角波的上升沿包含512 个X 方向的三角波。(2)同步系统时钟指同步扫描和采集,以光源为触发信号,通过控制卡对三角波序列的频率和采样速率进行同步控制。(3)对于横向X 振镜和纵向Y 振镜可以分别用小周期三角波序列和大周期三角波序列激发。每个小周期三角波对应大周期三角波序列中1 个三角波上的一点,以保证X 方向和Y 方向上的协同。三角波序列如图3 所示。通过编写程序设定振镜驱动器的电压值、生成三角波序列、设定扫描线数和帧数以及设定同步时钟来实现系统控制。
图3 横向X 振镜和纵向Y 振镜三角波序列图
1.2 光学组件设计
为了能够更加稳定地测量人眼,本研究将光学系统进行集成,形成一个可以在一定范围内自由移动的测头,其结构如图4 所示,实物图如图5 所示。测头朝X 和Y 方向移动使得扫描光线的中心对准瞳孔中心,保证光线穿过角膜映光点并使角膜映光点呈现在窗口正中;测头朝Z 方向移动保证显示界面可以完整地对全眼成像。本研究在系统中设计集成了内固视组件和视频监视组件,确保被测人员能够进行固视,从而保证眼轴长度测量的准确性。
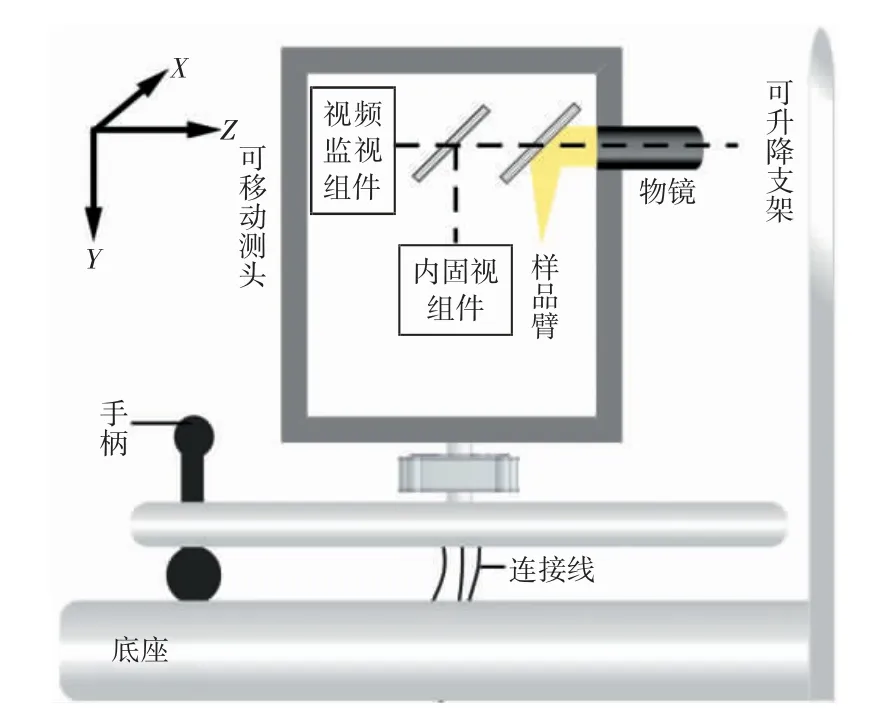
图4 测头结构图
图5 测头实物图
1.2.1 内固视组件设计
在光学眼组织测量中,能否测量到真视轴对于测量结果准确性有很大影响。为了准确地测量眼轴长度,需保证扫描光线与视轴处于同一水平面。在眼科学中眼轴又称为视轴,当人眼紧盯一点时,该点与黄斑中央凹的通路就是视轴所在的方向。据此设计内固视灯组件,由聚焦透镜5 和蓝色可见光LED 组成。可见光穿过分光镜和系统物镜进入人眼,被测人员在测试中紧盯固视灯以保证固视点到黄斑中央凹的通路与从样品臂射入人眼的扫描光线夹角为零,即平行于Z 方向,此时眼轴所在的直线与显示窗口的水平面垂直。
1.2.2 视频监视组件设计
为了能够检查被测人员固视是否良好,还设计了视频监视组件。该组件由聚焦透镜6 和电荷耦合元件(charge-coupled device,CCD)以及定焦镜头组成,通过定焦镜头对角膜处进行实时成像,CCD 将图像信号通过USB 接口传输至计算机,通过显示窗口可以实时观察被测人员的角膜位置。实时视频图像中还可以观测到由内固视灯在角膜上的反射点形成的光斑,如图6 所示。操作人员通过观察光斑是否与瞳孔共中心来确定被测人员是否进行良好的固视,从而初步确定眼轴位置。在光斑与瞳孔共中心的情况下微调测头的位置,当显示窗口中呈现出经过角膜映光点垂直入射的光线时,便可精确确定眼轴的位置。
2 测量方法
人眼是一个复杂的结构。根据眼组织生理解剖学,眼轴长度是指角膜前表面至视网膜黄斑中央凹的距离,包括中央角膜厚度、前房深度、晶状体厚度及玻璃体腔长度等[2]。结合眼视光学领域对眼模型的研究成果,可以通过测量其内部结构曲面分界处和屈光介质精确的光学特征参数来计算人眼模型各结构和介质的平均折射率[16]。本研究选择以Escudero-Sanz 与Navarro 提出的五面大视场人眼光学模型[17]中计算出的折射率为参照,以测量眼组织参数。表1 为该模型各个结构的具体参数[17]。
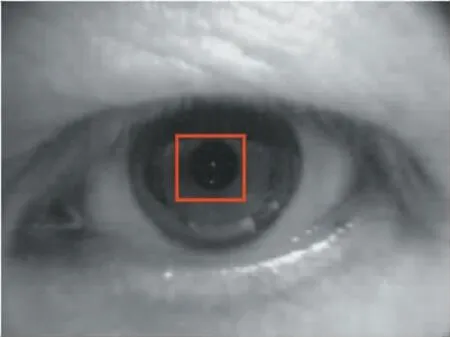
图6 实时视频图像示例
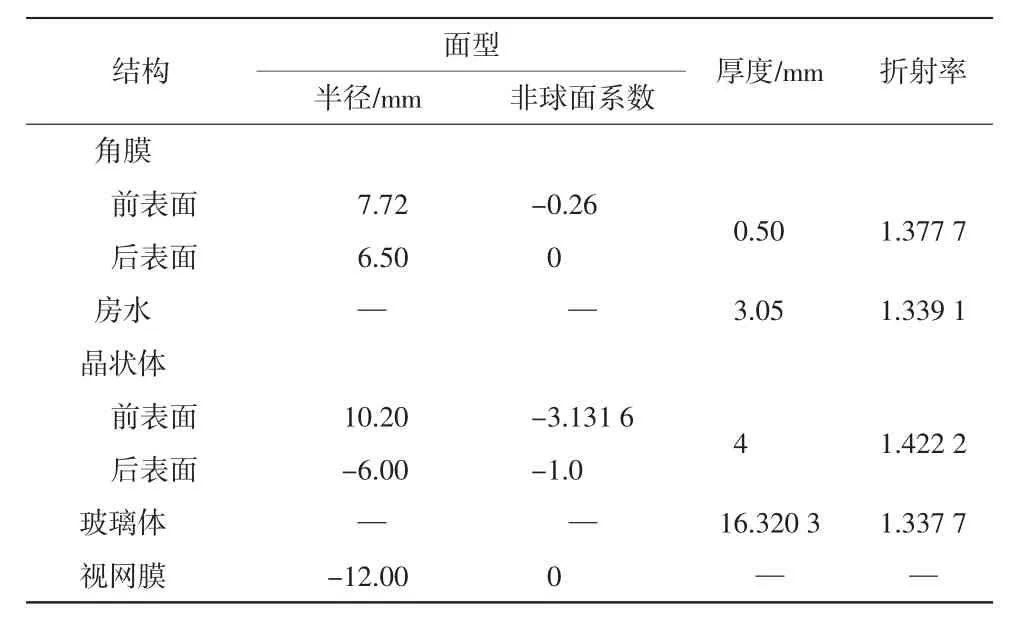
表1 大视场人眼光学模型各个结构的具体参数[17]
利用本文研制的全眼组织参数测量系统测量眼轴长度等眼组织参数,通过内固视灯组件和视频监视组件精确确定眼轴位置时,立刻采集原始数据。将原始数据经过数据处理最终生成2D 灰度图像。在扫描过程中,设定采样点数为4 096,即生成图像的纵向像素点为4 096 个。根据参数可算出生成图像的纵向像素间隔为0.011 4 mm。在图像上测量眼组织参数,具体步骤如下:(1)对图像进行高斯滤波,降低图像噪声;(2)对图像进行先膨胀后腐蚀操作,保证组织边缘轮廓的连续;(3)进行二值化处理,以便边缘提取;(4)利用Sobel 边缘提取方法获得图像各处组织边缘,比如角膜上表面、角膜下表面、晶状体上表面、晶状体下表面以及视网膜黄斑中心凹;(5)用最小二乘法拟合上述组织表面的曲线,再求出各表面与过角膜映光点的亮线的交点坐标。在计算某组织长度时,先计算出该组织在眼轴所在直线上的起始位置和终点位置的像素坐标,其纵坐标的差值就是该组织长度所占像素点的个数,像素点的个数乘以每个像素点的长度得到该组织的光学通路长度。光学生物测量中,需要将光学通路长度转换为几何光学长度。根据大视场人眼光学模型的结构参数表,再除以相应的折射率,便可得到该组织的实际长度。
在具体测量中,先找到图像中角膜上表面的映光点,记录该点的坐标T1(x1,y1),将该点与黄斑中央凹连线,依次相交角膜下表面于T2(x2,y2)、交晶状体上表面于T3(x3,y3)、交晶状体下表面于T4(x4,y4),最后记录黄斑中央凹的坐标T5(x5,y5)。人眼组织的2D图像及各坐标点如图7 所示,依次计算各层次厚度,记中央角膜厚度为H1、前房深度为H2、晶状体厚度为H3、眼轴长度为H4,计算公式如下:
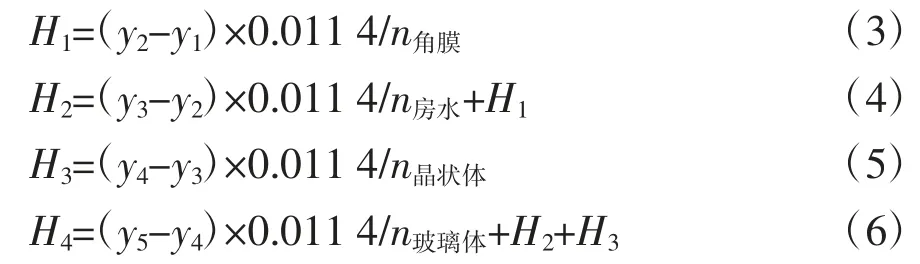
式(3)~(6)中,n角膜、n房水、n晶状体和n玻璃体分别为角膜、前房、晶状体和玻璃体的折射率。
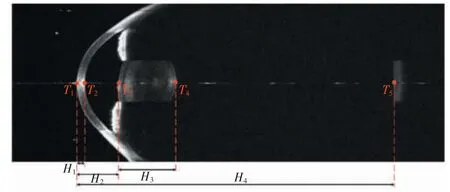
图7 人眼组织2D 灰度图像及各坐标点
在计算眼轴长度时,除了采用上述分段测量再相加的方式外,还可以通过角膜上表面到黄斑中央凹的距离直接测得,但需要讨论人眼平均折射率的问题。Hitzenberger 等[18]根据Gullstrand 模型眼推导得出全眼在近红外波长照射下平均折射率n¯为1.354 9,考虑到本系统的扫描光线中心波长为1 060 nm,故采用1.354 9 作为人眼平均折射率。由此得到眼轴长度H5的计算公式为

3 实验验证
3.1 模拟眼结构测量
本研究利用玻璃靶制作了模拟眼结构模型。该结构模型由5 块屈光度标准但厚度不同的平面玻璃镜片以一定距离组装在视度筒内,用于模拟眼角膜、晶状体结构和视网膜反射层,如图8 所示。玻璃片标称折射率为1.516。经千分尺测量,5 块玻璃镜片的厚度分别为0.504、1.231、1.232、1.233 和0.993 mm,第1 块和第2 块、第4 块和第5 块玻璃镜片的间距分别为3.943 和23.021 mm。依据上述眼组织生物参数测量的方法利用本系统对模拟眼结构采集10 组数据,并对10 幅图像依次进行测量,分别测出5 块玻璃镜片的厚度h1、h2、h3、h4、h5以及间隔t1和t2,并求出平均值,测量结果详见表2。
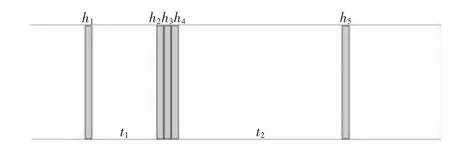
图8 模拟眼结构示意图
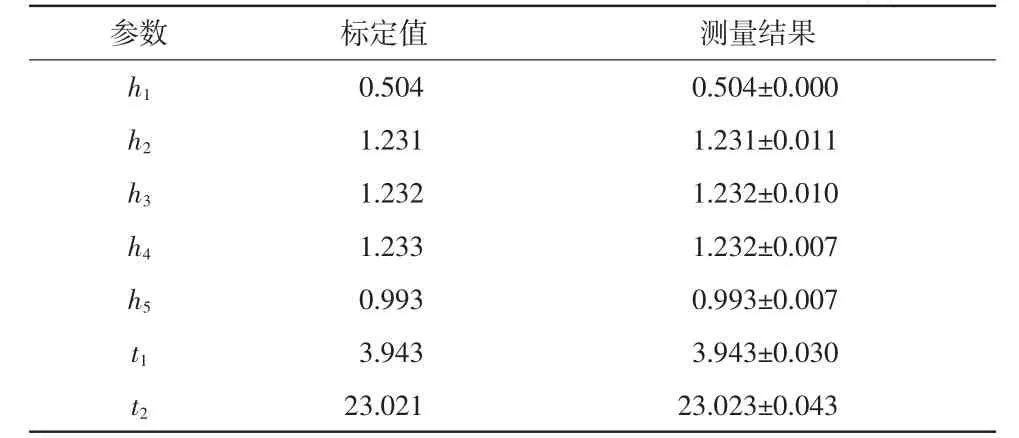
表2 模拟眼结构模型测量结果 单位:mm
由表2 测量结果可知,本系统测量准确度较高,重复性较好,测量精度符合眼轴长度测量要求。
3.2 人眼测量
本系统激光输出控制在角膜处入射功率1.5 mW以内,在符合美国国家标准学会(American National Standards Institute,ANSI)安全标准的同时满足测量要求。招募4 名课题组志愿者作为本次实验的受试者,利用本系统对4 名受试者的左右眼进行测试,共获得8 例眼组织参数数据。测试时受试者端坐于测量系统前,下颌和额部贴紧颌托和额托,受试者紧盯系统内蓝色固视灯保证眼轴方向与扫描线Z 轴方向平行,操作者不断调整物镜位置使全眼组织图像能够完整地呈现在显示界面中。同时通过观察视频监视组件的界面来确定固视灯的光线是否穿过瞳孔中心,再结合显示界面中光线是否穿过角膜映光点并在界面上形成一条亮线,以实现对眼轴长度的精准测量。
首先分段计算出中央角膜厚度H1、前房深度H2、晶状体厚度H3和眼轴长度H4,之后根据平均折射率n¯用公式(7)计算出眼轴长度H5。为减小偶然误差、保证测量结果的准确性,每例人眼均采集5 幅图像,得到5 组测量数据,再分别求得各组织长度的平均值和标准差。为验证测量结果的准确性,将测量结果与IOL Master 700 进行比较。目前,IOL Master 700作为光学眼组织参数测量的“金标准”,根据IOL Master 的检测报告,其对每例眼球的中央角膜厚度、前房深度、晶状体厚度和眼轴长度均测量5 次,取其平均值和标准差作为测量结果。
3.3 测量结果及分析
本系统和IOL Master 700 对每例眼球H1~H5的测量结果详见表3~6。
对原始数据进行统计学分析,P<0.05 表示所测数据具有统计学意义。选择线性回归分析来评价本系统测量和IOL Master 700 对中央角膜厚度、前房深度、晶状体厚度和眼轴长度测量结果的一致性,统计结果详见表7。

表3 受试者1 眼组织生物参数测量结果 单位:mm

表4 受试者2 眼组织生物参数测量结果 单位:mm

表5 受试者3 眼组织生物参数测量结果 单位:mm

表6 受试者4 眼组织生物参数测量结果 单位:mm
在线性回归分析中,经假设检验,回归系数接近1,截距接近0,说明2 种系统检测结果的一致性比较好[19]。表7 中,R2为判定系数,是用于判定线性方程拟合优度的重要指标,R2值越接近1 越好。从结果中可以看出,R2值均接近于1,由此判断模型拟合效果良好。其中,由于中央角膜厚度约为0.5 mm,而前房深度、晶状体厚度等为3~4 mm,中央角膜厚度的量级较小,参数测量误差对其的R2影响较大,但也在可接受范围内。经回归方程F 检验,其P 值<0.01,说明该回归方程有效。
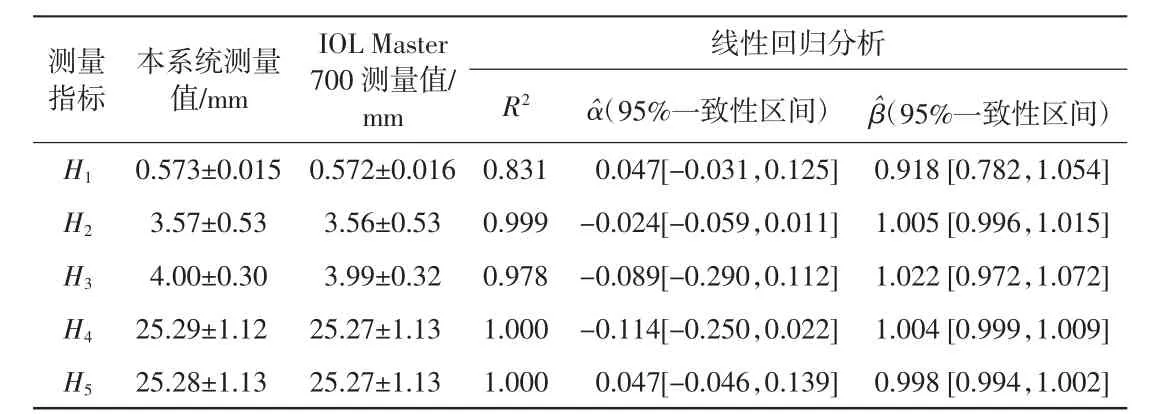
表7 测量结果的一致性分析
在眼轴长度测量方面,本研究提出了分段测量再相加的测量方法和按照人眼平均折射率n¯计算眼轴长度2 种方法,通过与IOL Master 700 的测量结果进行比较,可见选择平均折射率n¯测量方法的准确度较高。其原因可能是分段测量方法在测量过程中利用多次测量结果相加,使得测量误差增大,导致测量结果准确度降低。
以上统计学分析表明,本系统的测量结果与IOL Master 700 的测量结果具有很高的一致性,二者测量中央角膜厚度、前房深度、晶状体厚度和眼轴长度的均值差值较小且均在合理范围内,测量结果基本一致。综上所述,本系统实现了对眼轴长度等眼组织生物参数的精准测量。
4 结语
在眼科疾病的预防、诊断和治疗过程中,需要获得精准的眼组织生物参数,如眼轴长度、中央角膜厚度、前房深度以及晶状体厚度等,因此眼组织生物参数的高精度测量显得尤为重要。本文利用VCSEL 扫频光源实现了大量程测量眼组织生物参数,同时保留了OCT 系统高分辨力的优势,在测量眼轴长度的同时可以对眼前节和眼底的组织进行高分辨力成像,为眼组织疾病的诊断和防治奠定了实验基础,提供了有效工具。
但本研究还有一些不足需要改进和完善,例如:(1)目前全眼成像的单焦点不能兼顾眼前节和眼底成像,在保证眼前节高分辨力的同时眼底成像较为模糊,反之眼前节成像效果变差。目前采用的是折中方法,将焦点置于兼顾眼前节和眼底成像质量的中间位置。为获取高质量的眼内组织图像,未来将采取焦点可调节技术或者多焦点技术进行进一步改进。(2)研究更准确、更高效的算法,通过对图像边缘的精确分割提取出特征点的坐标值,更高效地计算眼组织参数。(3)进一步对不同类型的受试者进行测试,探索系统在测量正常人和眼病患者时的准确度和适用范围。