基于TRIZ理论的消毒机器人设计研究
2021-04-02代相伍王继荣时连文杨家岐李军
代相伍 王继荣 时连文 杨家岐 李军
摘要: 针对消毒工作不完善和不及时而引起的绝大多数病毒大范围传染问题,本文利用发明问题解决理论(theory of inventive problem solving,TRIZ),提出一种自动消毒机器人的结构方案。通过对消毒机器人进行功能和资源分析,建立了消毒机器人物场模型,发现消毒机器人的技术矛盾,同时运用发明原理与矛盾矩阵解决问题,得到合适的解决方案,并对机器人消毒结构进行设计。研究结果表明,该机器人能自主对环境进行检测并杀菌消毒,真正实现了自动化操作,且电池即将用尽时,可自主返回充电仓充电。此结构安全性能更高,适应性更强,提高了消毒的效率和安全性。该研究对降低生活及工作环境的病毒感染具有重要意义。
关键词: AGV; TRIZ理论; 消毒机器人; SLAM算法
中图分类号: TP242文献标识码: A
作者简介: 代相伍(1997-),男,河南周口人,硕士研究生,主要研究方向为机器人。
通信作者: 王继荣(1967-),女,山东威海人,博士,教授,主要研究方向为机器人。 Email: wangjirong43@163.com
对生活及工作环境进行必要的消毒能够大幅度降低病毒感染的机率。传统的人工消毒会增加人与人之间的交叉感染,并且存在消毒效果有限、质量不稳定以及对消毒人员造成伤害等问题,而消毒机器人能够消除这些缺点。因此,国内外许多学者对消毒机器人进行了研究。M. A. V. J. Muthugala等人[1]设计了一种利用模糊逻辑建立墙体消毒机器人的跟踪行为新方法,并在此基础上,提出了一个非单例1型模糊逻辑系统(type 1 fuzzy logic system,T1-FLS)和一个非单例区间2型模糊逻辑系统(Interval Type 2 Fuzzy Logic System,IT2-FLS);J. Miseikis等人[2]设计了一种型号为Lio的带有多功能手臂的移动机器人平台,能被迅速调整,以执行消毒和远程体温升高检测等功能;P.Chanprakon等人[3]开发了一种基于树莓Pi的嵌入式系统的紫外线消毒机器人,用于手术室或病房的消毒;丁志虎等人[4]设计了一款型号为TRD-01的智能消毒机器人,配有高浓度干雾过氧化氢、紫外线消毒灯及空气过滤器;胡福文等人[5]设计了绿色消毒智能机器人,基于酸性氧化电位水淋雾沉降,实现空气消毒,并且研究了基于Rao-Blackwellized粒子滤波器的自主导航算法。目前,消毒机器人的研究热点是采用一种安全的消毒方式实现全自动化的消毒。由于消毒机器人的消毒存在二次污染、消毒效率低、自动化程度不够高等问题。因此,本文基于TRIZ,对一种全自动消毒机器人进行方案设计,建立消毒机器人物场模型,真正实现了自动化操作。该研究具有较好的应用前景。
1TRIZ
TRIZ是由苏联发明家G.S.Altschuller和他的团队對大约250万份专利文献进行分析、归纳和总结,并综合多学科领域的原理和法则,形成的一套具有完整体系的发明问题解决方法和理论[67]。本文对消毒机器人的设计主要采用TRIZ中功能分析、资源分析、物场模型、技术矛盾与发明原理等相关内容。
2消毒机器人的TRIZ分析
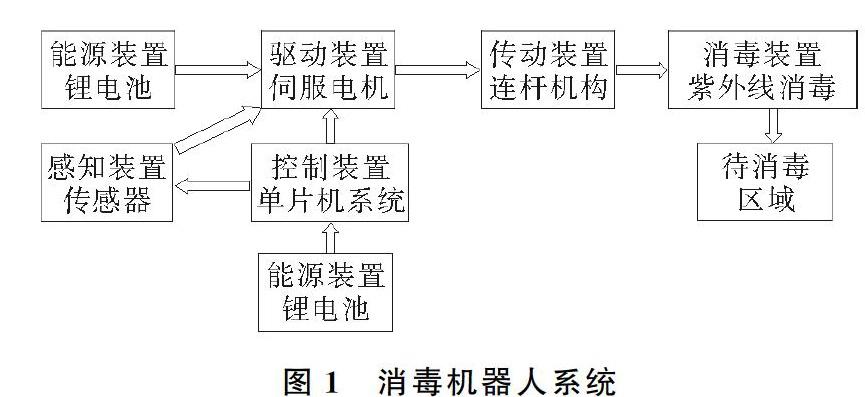
消毒机器人由能源装置(锂电池)、驱动装置(伺服电机)、传动装置(连杆机构)、控制装置(单片机系统)、消毒装置(紫外线消毒灯)和感知装置(传感器)多个系统组成。消毒机器人系统如图1所示。
2.1消毒机器人的功能分析
对消毒机器人功能进行分类,主要分为技术系统、用途、技术功能以及主要功能。技术系统包括动力系统、消毒系统、控制系统、感知系统、检测系统;用途是杀菌消毒;技术功能主要是自主导航和多场景自主识别;主要功能是对待消毒区域识别,机器人自主判断,并完成杀菌消毒工作。
2.2资源分析
1)物质资源。该消毒机器人由连杆、紫外线消毒灯、滚珠丝杠、轴承、支架、电机、传感器、单片机系统、自动导向车(automated guided vehicle,AGV)等组成。
2)空间资源。该消毒机器人消毒模块由三根紫外线消毒灯由中心向外扩散分布,提高了空间使用率。
3)能量资源。主要有电能、电动机产生的机械能、消毒灯产生的光能和热能。
4)时间资源。AGV小车以及带动消毒灯伸缩结构的直流电机在单片机控制下可实现循环运动。
2.3消毒机器人物场分析
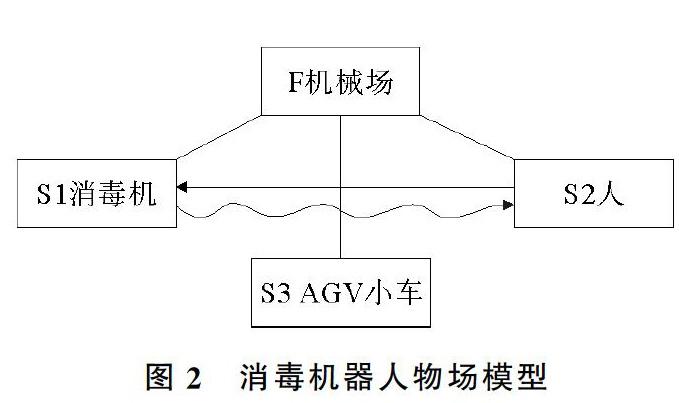
利用物场模型对智能消毒机器人装置进行问题描述。消毒机器人物场模型如图2所示,消毒机通过人工操作,对消毒区域进行杀菌消毒,该研究被作用对象是消毒机,而作用对象是人。人用手工操作消毒设备进行消毒,增大了人与人之间交叉感染的机率,对人产生有害影响,因此,需要添加一个场来抵消有害作用,消除人与消毒设备的直接接触,将有害作用消除。经过查表分析得到方案模型,引入AGV小车,能够避免消毒过程中人与消毒设备的直接接触,消除了有害作用。
对设计的最终目标、理想化结果和达到理想解所遇到的障碍等进行如下分析:
1)设计最终目标。消毒机器人对最终设计的目标进行自动、安全的杀菌消毒。
2)理想化最终结果。不需要人为操控,消毒机器人可以安全、智能、自主消毒。
3)达到理想解的障碍。因消毒机器人智能化程度达不到要求。
4)出现此障碍的结果。因消毒机器人不能实现全自动杀菌消毒,且传统消毒方式需要有人工操作,空气中增加了可吸入颗粒物。
5)不出现此障碍的条件。消毒机器人能识别不同的场景自主导航,并采取更健康的消毒方式。
6)创造这些条件所用资源。智能识别分析系统,电能,电动机旋转产生的机械能、消毒灯发光产生的光能和热能等。
2.4技术矛盾与发明原理解决复杂问题
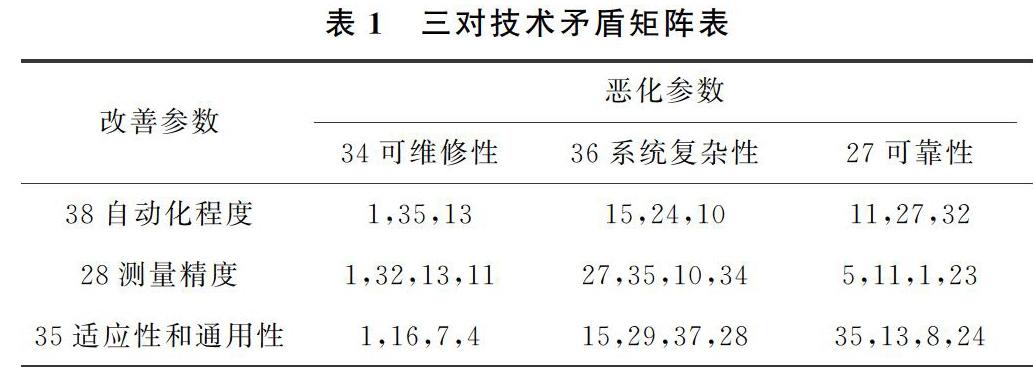
传统AGV小车导航主要有电磁导航、激光导航、惯性导航和二维码导引等方式。电磁导航需要在AGV运行轨迹下方埋设金属线,致使周围分布有电场和磁场,通过检测相应电磁场的强度,获得机器人行驶过程中的空间位置[8]。稳定性高,但美观不足,并且路径变得更困难。激光导航以激光雷达作为探测外部周围环境的传感器,从而进行导航定位[9],其成本高,对环境要求相对苛刻,只适用于无遮挡环境。目前,采用视觉传感器进行导航是较为先进的视觉导航,其具有响应速度快、成本低、获取信息量大等优势[10],但技车检测路径的测量精度,则系统的复杂性会增加。提高AGV的适应性和通用性,其可靠性又会受到影响。通过对AGV小车进行矛盾分析,得到自动化程度、测量精度及适应性和通用性的优化参数,同时也得到了可维修性、系统的复杂性及可靠性的恶化参数。三对技术矛盾矩阵表如表1所示,由文献[11]中TRIZ矛盾矩阵表可查得发明原理分别为:1分割原理,8重量补偿原理,10预先作用原理,13反向作用原理,24借助中介物原理,27廉价替代品原理,34抛弃或再生原理,35物理或化学参数改变原理。由表1可以得知,在自动化程度和可维修性组成的技术矛盾中。采用分割原理,通过对AGV小车上安装的激光传感器、深度摄像头传感器、超声波传感器等接口类型进行改变,使之能够分解成与小车相互独立的单元。简化安装与拆卸操作,便于更换机器人底盘损坏的部件,提高自动化程度的同时,也增加了机器人的可维修性。在测量精度和系统复杂性构成的技术矛盾中,采用廉价替代品原理,用测量精度相对低一点的激光传感器和超声波传感器辅助配合测量。代替测量精度较高的激光传感器,既能节约成本,又能够保证测量精度的准确性。在适应性和通用性与可靠性构成的技术矛盾中,采用反向作用原理,将传统的四轮驱动换成两轮,减少的两轮(支撑轴不可动)可用旋转360°的万向轮(支撑轴可动)进行代替,使机器人能够在更小的范围内旋转360°完成转弯操作,以便适应各种复杂环境,不会因为人为干扰而停止工作。
在医学领域,主要有以下几种传统消毒方式,即采用浓度75%的酒精消毒液喷洒,高浓度H2O2蒸汽消毒,酸性氧化电位水淋雾沉降实现空气消毒,或用紫外线消毒。在医院手术间[12]和隔离病房[13]等场所采用消毒液喷洒方式会对环境和人体造成一定的影响,利用紫外线照射消毒对环境和人影响相对较小,比较清洁[14],但对设备的制造精度要求更高。因此,如果改用紫外线方式消毒杀菌,所需要的机械结构更复杂,整体消毒模块的质量增加,减弱了机器人的灵活性。目前,移动消毒机器人[15]存在着巨大的挑战和机遇,市场上普遍采用的单根紫外线灯消毒方式,其照射面积有限,且消毒时间较长,消毒效率有待提高,而采用多根紫外线灯同时工作时,部分地方会重复照射,造成能源浪费。通过TRIZ分析可知,需要优化的参数为形状和作用时间,恶化的参数为制造精度和能量损失。两对技术矛盾构成的部分矛盾矩阵表如表2所示。由TRIZ矛盾矩阵表可查得发明原理为:30柔性壳体或薄膜原理,32颜色改变原理,40复合材料原理。
由表2可以看出,在形狀和制造精度构成的技术矛盾中,可以利用复合材料发明原理,将机器人外观不受力或者受力不大的区域采用丙烯腈-丁二烯-苯乙烯共聚物工程塑料替代钢结构,可有效降低整体质量,减弱底盘受载,提高了消毒机器人的灵活性。利用颜色改变发明原理,将高透性亚克力板[16]作为紫外线灯的灯罩,增加透光面积,提高了消毒效率和效果。作用时间和能量损失构成的物理矛盾无法解决,考虑到实际情况,杀菌消毒是优先目标,决定增加紫外线消毒灯的数量,在原有单根消毒灯的基础上增加两根,三根消毒灯互成120°角排列。
3消毒机器人设计方案
基于TRIZ,消毒机器人分为消毒模块和移动模块。移动模块采用激光导航AGV小车,消毒模块采用三根紫外线消毒灯互成120°排列,用滚珠丝杠带动伸缩。消毒模块结构示意图如图3所示,该模块由外骨架、滚珠丝杠、连杆、紫外线消毒灯等构成。
消毒模块上方装有伺服电机带动中间滚珠丝杠旋转,推动连杆,带动消毒灯伸出,三根消毒灯互相成120°角排列,最大限度地实现了光照的均匀分布,确保消毒机器人360°无死角杀菌消毒。在非消毒时间,为避免消毒灯因触碰到障碍物而受到损坏,伺服电机旋转,带动连杆将消毒灯撤回,并且消毒灯外侧装有高透性亚克力板,与外壳配合形成内部相对封闭的空间,有效的减少了灰尘。
移动模块为自动导向车,由车体框架、蓄电和充电装置、驱动装置、执行装置、导向装置、控制中心、安全保护装置等组成。消毒机器人上下结构如图4所示。
工作过程中,移动模块通过传感器模块(激光传感器[17]、深度摄像头传感器、超声波传感器等)采集的信息,基于SLAM算法[18],机器人能够在环境位置和自身位置都不能确定的情形下,以自身中心为坐标中心逐渐建造增量式地图[19],并对自身位置和姿态进行实时的估算,最终做到自身的自主定位和导航[20],并能识别周围环境的信息。同时,将采集到的环境信息发送给单片机,由控制中心控制AGV小车电机的转速带动消毒机器人的运动。使用过程中,仅需要将智能消毒机器人带到现场,操作机器人进行全地图扫描,并标记好相应的位置,机器人便能自主对环境进行检测并消毒杀菌,电池即将用尽时,自主返回地图中标记为充电仓的地点充电。相比于其他消毒机器人在消毒过程中每次都需要人为操控的现状,该机器人仅需首次对消毒区域进行扫描建模,便可在接下来的消毒过程中自动消毒,真正实现了自动消毒,可以适应办公区、机场、车站、购物场所等地面平坦的场合。
4结束语
本文应用TRIZ进行了智能消毒机器人的方案以及局部结构的概念设计,为消毒机器人提供了一种新的设计思路。采用目前相对安全的紫外线消毒方式,并对移动结构进行了创新。在研究过程中,由于算法和程序方面的欠缺,使得该消毒机器人与其他消毒机器人相比,虽然自动化程度有所提高,但还不能达到完全自动化,有待进一步的深入优化算法。本文对消毒机器人的创新发展提供了一种方案与思路,在接下来的工作中,可以着重在寻找更清洁的消毒方式以及更加智能化的算法两方面深入研究。
参考文献:
[1]Muthugala M A V J, Samarakoon S M B P, Rayguru M, et al. Wall-following behavior for a disinfection robot using type 1 and type 2 fuzzy logic systems[J]. Sensors, 2020, 20(16): 4445-4467.
[2]Miseikis J, Caroni P, Duchamp P, et al. Lio-a personal robot assistant for human-robot interaction and care applications[J]. IEEE Robotics and Automation Letters, 2020, 5(4): 5339-5346.
[3]Chanprakon P, Sae-Oung T, Treebupachatsakul T, et al. An ultra-violet sterilization robot for disinfection[C]∥2019 5th International Conference on Engineering. Thailand: Applied Sciences and Technology (ICEAST), 2019.
[4]丁志虎, 胡光闊. 智能机器人在医院消毒作业中的应用[J]. 医学信息, 2020, 33(5): 28-29.
[5]胡福文, 刘宴诚, 强润子. EOW绿色消毒智能机器人自主导航系统设计[J]. 机械设计与制造, 2020(2): 275-278.
[6]陶义, 王宗彦, 吴淑芳, 等. 基于TRIZ矛盾分析法的重型卡车弹簧支架轻量化设计研究[J]. 机械设计与制造, 2015(3): 188-191.
[7]梅雪川, 高燕, 叶敏, 等. 基于TRIZ理论的超大面积融合施胶系统设计[J]. 轻工科技, 2020, 36(12): 35-36, 39.
[8]庞川川. 基于医疗运输的电磁导航AGV控制系统研究[J]. 电工技术, 2018(8): 21-22, 25.
[9]徐京邦, 刘洋, 李计星, 等. AGV激光导航定位技术综述与发展趋势[J]. 物流技术与应用, 2020, 25(6): 124-125.
[10]贾丙西, 刘山, 张凯祥, 等. 机器人视觉伺服研究进展: 视觉系统与控制策略[J]. 自动化学报, 2015, 41(5): 861-873.
[11]张士运. TRIZ创新理论研究与应用[M]. 北京: 华龄出版社, 2010.
[12]姚冲, 高兴莲, 吴荷玉, 等. 智能化消毒机器人在新型冠状病毒肺炎患者术后手术间消毒效果的评价[J]. 中国医学装备, 2020, 17(6): 174-176.
[13]成静, 杨旭, 陈洁雅, 等. 智能消毒机器人在新型冠状病毒性肺炎隔离病房护理使用体验的研究[J]. 科技与创新, 2020(13): 28-31.
[14]Hanoon M. UV light disinfection robots help to overpower pathogens[J]. Or Manager, 2015, 31(6): 24-25.
[15]程跃. 移动消毒机器人在新冠疫情下的挑战与机遇[J]. 机器人技术与应用, 2020(4): 47-48.
[16]徐嘉欣, 滕达, 林子旋. 亚克力板材的市场应用[J]. 营销界, 2019(43): 184, 186.
[17]陆小锋, 许思源, 许皓然, 等. 基于激光传感器的小空间感兴趣目标检测[J]. 电子技术与软件工程, 2020(18): 96-98.
[18]Zhang W, Du Y L, Bai Q H. An optimized coverage robot slam algorithm based on improved particle filter for wsn nodes[J]. International Journal of Grid and High Performance Computing (IJGHPC), 2020, 12(4): 76-88.
[19]张国良, 姚二亮, 岳亚南, 等. 一种鲁棒闭环的增量式Graph SLAM算法[J]. 电光与控制, 2015(7): 28-33.
[20]吕华新, 陈玲, 骆小龙, 等. 基于SLAM技术的地下空间三维实景建设关键技术研究[J/OL]. 测绘地理信息: 1-4[2020-12-21]. http: ∥kns. cnki. net/kcms/detail/42. 1840. P. 20200803. 1530. 002. html.
Abstract: In view of the large-scale infection of most viruses caused by imperfect and untimely disinfection, this paper proposes a structural scheme of automatic disinfection robot based on the theory of inventive problem solving (TRIZ). Through the analysis of the function and resources of the disinfection robot, the human field model of the disinfection machine is established, and the technical contradiction of the disinfection robot is found. At the same time, the invention principle and contradiction matrix are used to solve the problem, and the appropriate solution is obtained, and the disinfection structure of the robot is designed. The research results show that the robot can detect and disinfect the environment independently, realize the automatic operation, and return to the charging bin for charging when the battery is about to run out. This structure has higher safety performance and stronger adaptability, which improves the efficiency and safety of disinfection. This study is of great significance to reduce the virus infection in living and working environment.
Key words: AGV; TRIZ theory; disinfection robot; SLAM algorithm
