基于人机协作的树干涂白装置研制与开发
2021-04-01唐磊生侯静崔一帆
唐磊生 侯静 崔一帆
摘 要:树干涂白已然成为保护树木的必要手段,通过对树干的涂白,可以有效防止树干受到自然界的侵害。本文基于SolidWorks、CAD等软件设计适应性更广的树干涂白装置,通过数据采集与分析,确定结构尺寸,将石灰水勾兑与灌装机构、便携背负式涂白机等机构集中在树干涂白装置整机上。通过树莓派与电源管理板,控制单向与双向开关,实现对整个装置的控制。所设计雾化喷涂机械手可将树干360°包裹,实现树干涂白工作的高效作业。完成树干涂白装置与便携背负式树干涂白机设计。树干涂白装置与便携背负式树干涂白机的设计旨在克服人工进行树干涂白工作时效率低、喷涂不均匀、涂白质量差的缺点,实现利用机器辅助人工完成树干涂白工作,具有结构精巧、操作简单、生产成本低、绿色环保和稳定可靠等优点。
关键词:树干涂白;人机协作;石灰水勾兑;便携式
中图分类号:S776.28 文献标识码:A 文章编号:1006-8023(2021)01-0038-07
Abstract:Whitening the tree trunk has become a necessary means of protecting trees. By whitening the trunk, it can effectively prevent the trunk from being damaged by nature. This paper designs a more adaptable tree trunk whitening device based on SolidWorks, CAD and other software. Through data collection and analysis, the structure size is determined, and the lime water blending and filling structure, portable knapsack whitening machine and other institutions are concentrated on the whole trunk whitening device. Through raspberry PI and power management board, one-way and two-way switches are controlled to realize the control of the whole device. The designed atomized spraying manipulator can wrap the trunk 360° to realize the efficient operation of whitening the trunk. Complete the design of trunk whitening device and portable backpack trunk whitening machine. The design of the tree trunk whitening device and portable knapsack whitening machine aims to overcome the shortcomings of low efficiency, uneven spraying, and poor whitening quality when manually doing trunk whitening work, and realize the use of machine-assisted manual completion of trunk whitening work or the trunk whitening machine to complete the whitening work autonomously. The trunk whitening device has the advantages of exquisite structure, simple operation, low production cost, environmental protection, stability and reliability.
Keywords:Tree trunk whitening; man-machine collaboration; lime water blending; portable
0 引言
树干涂白是通过在树干表面刷涂树干涂白剂,预防早春霜冻对树干造成危害[1],避免树木被日灼[2],防止树干病菌感染,杀灭树干寄生病菌[3],给树干涂白是一种高效绿色的树干保护方式,为森林的经营发展提供有力支持[4]。然而目前树干涂白工作还是通过人工涂白的方式进行,涂白工作劳动强度大、效率低,涂白质量差和涂白高度层次不一[5],而且随着人工工资的增长,树干涂白作业的投入逐年增加。
由翟家怡[6]发明的一种适应多种地形的树干涂白机器人,通过三自由度机械爪配合移动式履带底盘与石灰水箱实现树干的涂白作业,涂白一棵树需要20 s。由税梦瑶等[7]发明的树干涂白机,通过在四轮车上边加装曲柄与滚轴在动力系统的带动下实现树干的涂白作业。由赵曦阳等[8]发明的一种组合式树干涂白刷,通过由支撑杆组成“7”字杆,在上邊安装滚筒刷,通过滚刷实现树干涂白作业。由陈浩[9]设计一款集平地行走、转弯及台阶越障多功能轮腿式树干涂白机实现树干涂白作业。由付秀等[10]设计的智能涂白装置主要由供能部分、涂白剂装盛部分以及机械手3个主要部分,在装置顶端安装太阳能电池板,可实现树干涂白作业。研究人员撰写树干涂白机器人相关发明专利以及树干涂白机的设计研制,因整机体积较大、生产成本高和适应能力不强,投入实际实验与应用相对较少。根据以上存在的问题,本文提出一种人机协作的树涂白装置,可实现辅助人工进行树干涂白作业。
1 装置结构方案
树干涂白装置主要包括车架、石灰水灌装箱、石灰水泵、一分三分流机构、驱动机构、自动喷涂机械手、便携背负式树干涂白机、控制按钮以及驱动机构;便携背负式树干涂白机包括手持喷涂机械手、石灰水箱和增压泵等机构;石灰水灌装箱可进行石灰水的勾兑和搅拌;驱动机构可驱动自动喷涂机械手在轨道滑块机构的作用下沿树干移动并进行石灰水的喷涂;手持喷涂机械手由人工背负操作,进行石灰水的喷涂。利用SolidWorks软件设计树干涂白装置三维结构,如图1所示。
1.1 树干涂白装置的参数选择
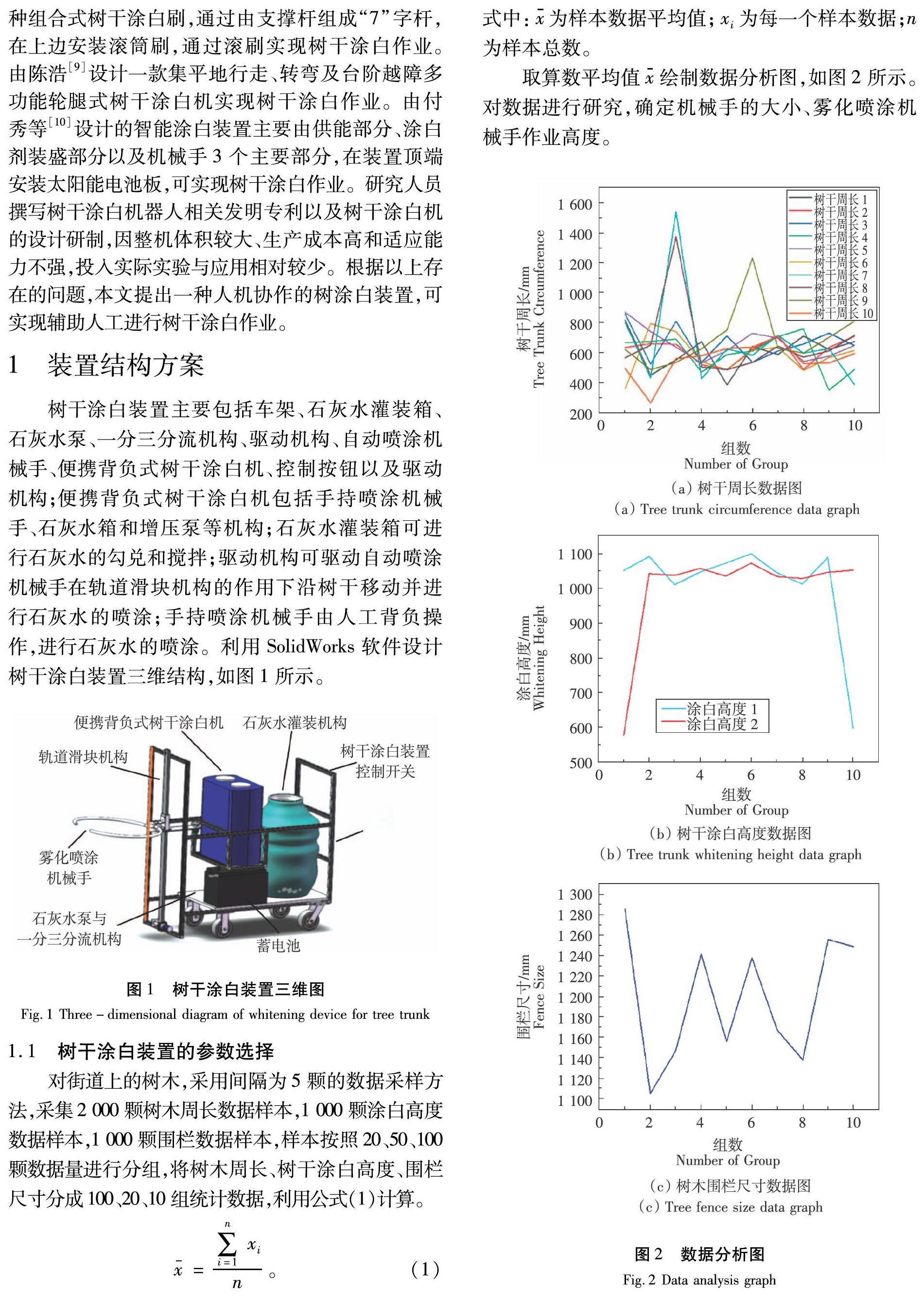
对街道上的树木,采用间隔为5颗的数据采样方法,采集2 000颗树木周长数据样本,1 000颗涂白高度数据样本,1 000颗围栏数据样本,样本按照20、50、100颗数据量进行分组,将树木周长、树干涂白高度、围栏尺寸分成100、20、10组统计数据,利用公式(1)计算。
x-=∑ni=1xin 。(1)
式中:x-为样本数据平均值;xi为每一个样本数据;n为样本总数。
取算数平均值x-绘制数据分析图,如图2所示。对数据进行研究,确定机械手的大小、雾化喷涂机械手作业高度。
根据取样调查结果图2可知,树干周长主要集中在500~700 mm,树干的半径是在79.58~111.41 mm,因为树干喷涂机器人的机械手要完全包裹住树干,故机械手的半径要大于111.41 mm,需要对其进行取整,并扩大适用范围,因此采用半径为150 mm的机械手,机械手的作业半径范围在80~150 mm;树干涂白高度在1 000~1 100 mm,为了方便车身结构设计,选用1 050 mm作为树干涂白高度,保证树干涂白高度均为1 050 mm;树干围栏尺寸在1 100~1 300 mm,且主要集中分布在1 200 mm左右,为了方便车身结构的设计,采用1 200 mm的树干围栏尺寸,假设每棵树都种在围栏中间位置,根据结果计算出树干圆心到围栏边的尺寸为600 mm。
最终确定车身尺寸为:450 mm×390 mm×1 200 mm,第一层高度240 mm,第二层高度700 mm。
1.2 车身结构方案
(1)树干涂白装置车身结构部分:车身材料全部采用20 mm×20 mm铝合金型材,采用两个万向轮和两个定向轮的四轮结构,使其具有更强的机动性[11-12],人工可方便地控制树干涂白装置,由人工操作万向轮实现转向,由驱动装置驱动树干涂白装置的定向轮移动。
(2)机械手运动轨道部分:采用长方形軌道与滑块相配合的滑动轨道,代替滚珠丝杠结构[13-14],对滑块进行改装,将机械手固定安装,让滑块带动机械手,在滑动轨道上快速移动,完成树干涂白作业。
(3)在机械手部分:采用直径16 mm的空心铜管与10 mm的黄铜雾化喷嘴。通过高温将机械手臂、雾化喷嘴,在焊锡的作用下连接在一起。在使用过程中不会出现雾化喷嘴脱落的情况。提高了树干涂白机器人工作的稳定性。
(4)树干涂白机器人控制部分:利用双向开关与点动开关控制机械手臂运动、水泵开关控制、机械手臂张开与闭合等状态。简便的控制设计,让涂白作业工人,可通过开关来控制树干涂白机器人的运动。
1.3 树干涂白石灰水勾兑与灌装机构
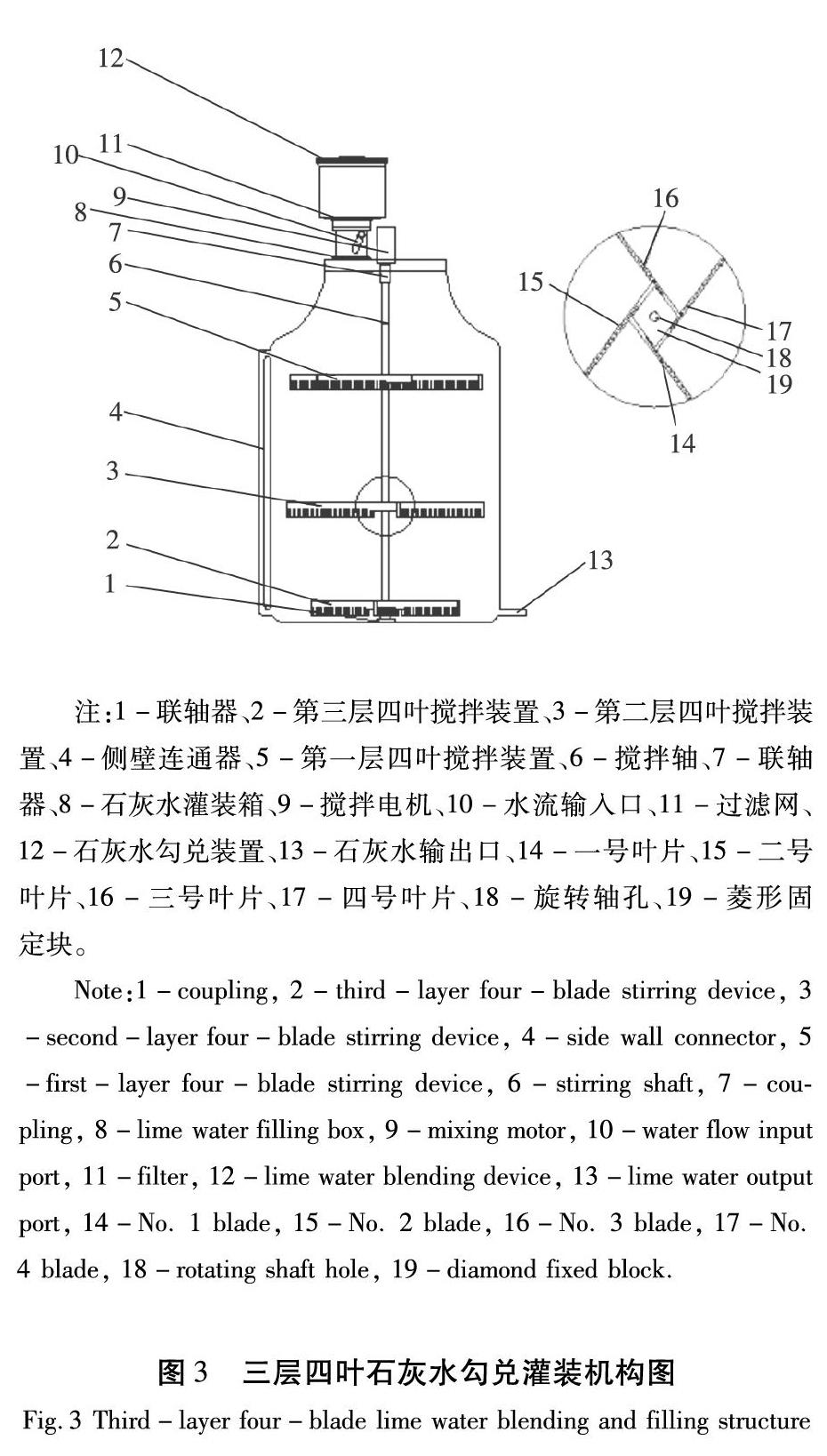
树干涂白石灰水勾兑与灌装机构采用4个搅拌叶片(图3),在搅拌轴的带动下,实现三层循环搅拌(简称四叶三层搅拌机构),以保证勾兑完成的石灰水不会在石灰水箱底出现沉淀。
树干涂白剂的配置中,根据不同的防治目的可选用不同的配置,主要成分和比例是:生石灰5 kg、硫磺粉1.5 kg、水36 kg、食盐2 kg[15]。
利用石灰水勾兑与灌装机构实现石灰水的配置,在通过过滤网筛除生石灰中的杂质,在搅拌电机、第一层四叶搅拌机构、第二层四叶搅拌机构、第三层四叶搅拌机构配合下,将生石灰搅拌均匀,实现石灰水的配置。配备好的石灰水从石灰水箱底部的侧壁输出。石灰水箱侧壁设计有连通器,可很直观地观测到石灰水箱内部石灰水液的剩余量,给后续工作带来很大的方便。
1.4 轨道滑块机构设计
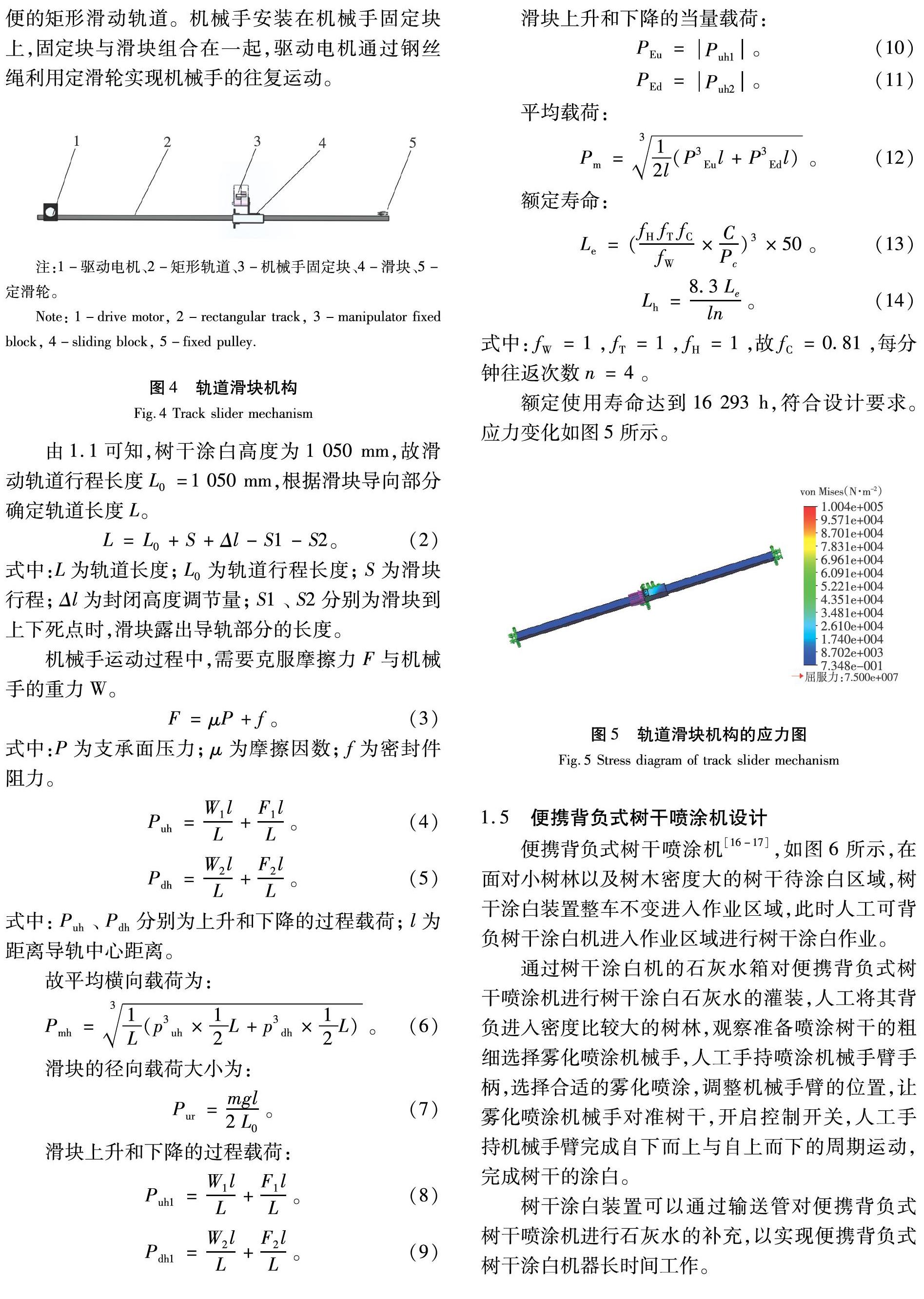
树干涂白装置中的雾化喷涂机械手是通过轨道滑块机构(图4),以此实现机械手的往复运动。
机械手需要实现稳定的往复运动,运动速度和运动精度要求较低,故采用结构简单,使用维修方便的矩形滑动轨道。机械手安装在机械手固定块上,固定块与滑块组合在一起,驱动电机通过钢丝绳利用定滑轮实现机械手的往复运动。
1.5 便携背负式树干喷涂机设计
便携背负式树干喷涂机[16-17],如图6所示,在面对小树林以及树木密度大的树干待涂白区域,树干涂白装置整车不变进入作业区域,此时人工可背负树干涂白机进入作业区域进行树干涂白作业。
通过树干涂白机的石灰水箱对便携背负式树干喷涂机进行树干涂白石灰水的灌装,人工将其背负进入密度比较大的树林,观察准备喷涂树干的粗细选择雾化喷涂机械手,人工手持喷涂机械手臂手柄,选择合适的雾化喷涂,调整机械手臂的位置,让雾化喷涂机械手对准树干,开启控制开关,人工手持机械手臂完成自下而上与自上而下的周期运动,完成树干的涂白。
树干涂白装置可以通过输送管对便携背负式树干喷涂机进行石灰水的补充,以实现便携背负式树干涂白机器长时间工作。
1.6 树干涂白装置整体结构设计
在完成四叶三层树干涂白石灰水勾兑与罐装机构、便携背负式树干喷涂机的设计工作,开展树干涂白装置整体结构设计。树干涂白装置整体结构如图7所示。
树干涂白装置结合机电一体化技术,主体涂白机构由涂白机械手臂、轨道滑块机构和驱动装置等部分组成。
2 树干涂白装置控制结构
树干涂白装置将树莓派[18]作为主控板,利用电源管理板管理雾化喷涂机械手、轨道滑块机构、增压泵、驱动机构和石灰水勾兑灌装机构,采用铅酸免维护蓄电池[19]为整个装置供电,硬件接线方案如图8所示。
树干涂白装置人机控制方案采用单向与双向点控开关,图8中:1号和2号开关均为双向开关,3号、4号、5号开关均为单向开关。操作人员根据实际需求进行操作,操作简单方便。
树干涂白装置工作流程如图9所示,简化说明如下。
(1)在人工的辅助下,树干涂白装置运动到待作业区域。
(2)选择待涂白树干作业区域,利用树干涂白石灰水勾兑与灌装机构罐装石灰水,并启动树干喷涂装置。
(3)将其推至距树干合适的距离,利用雾化喷涂机械手控制开关,打开机械手将树干包裹其中,关闭机械手。
(4)开启增压泵开关,进行喷涂作业,驱动电机驱动轨道滑块机构,使雾化喷涂机械手实现上下往复运动,进行树干涂白作业。
(5)树干涂白作业结束后,张开雾化喷涂机械手,准备下一阶段的工作。
(6)当石灰水用完后,利用石灰水勾兑与罐装机构,实现石灰水灌装或勾兑新的石灰水,罐装其中。
(7)可背负便携背负式树干喷涂机进入密度较大的树林,人工操作实现树干涂白作业。
3 树干涂白装置实验
在基于SolidWorks、CAD软件,完成树干涂白装置设计后,开展树干涂白装置的加工制作,树干涂白装置样机如图10所示。
在实际树干涂白作业中,可根据树干直径选择适当的树干涂白装置。设置工作模式及参数见表1。
人机协作模式比人工作业模式有更大的优势。树干涂白装置与树干涂白机根据实际涂白作业中树干类型的不同,作业时间不同。中型树干,由树干涂白装置完成,作业时间基本稳定在28 s左右;小型、大型和特大型树干,采用便携树干涂白机进行作业,单次完成1 050 mm的涂白理论用时22~36 s,完成整棵树的涂白作业需要多次操作,总用时与操作次数、人工操作效率有关。
4 结论
本文对一种基于人机协作的树干涂白装置利用SolidWorks、CAD等软件进行了机械结构、石灰水勾兑灌装机构、便携背负式树干涂白机、驱动结构、轨道滑块机构和控制机构的设计,对其工作原理进行了分析。完成了树干涂白机的样机制作与实验,与人工独立完成树干涂白作业对比,体现了树干涂白装置辅助人工进行涂白作业的优越性。树干涂白装置结构紧凑、操作方便、适应性强、生产成本低、可提升树干涂白质量和效率,并具有绿色环保、稳定性高等优点。
【参 考 文 献】
[1]武文斌.探析树木涂白实用技术[J].现代园艺,2014,37(20):46.
WU W B. Probe into the practical techniques of whitening trees[J]. Xiandai Horticulture, 2014, 37(20): 46.
[2]刘斌.树木涂白新技术研究及推广策略[J].现代园艺,2017,40(2):60.
LIU B. New technology research and promotion strategy of whitening trees[J]. Xiandai Horticulture, 2017, 40(2): 60.
[3]陈岩,杨泽春,荆晓梅,等.树木涂白新技术研究及推广[J].园林科技,2013,33(2):44-46.
CHEN Y, YANG Z C, JING X M, et al. Research and promotion of new whitening techniques for trees[J]. Journal of Green Science and Technology, 2013, 33(2): 44-46.
[4]胡雪凡,张会儒,张晓红.中国代表性森林经营技术模式对比研究[J].森林工程,2019,35(4):32-38.
HU X F, ZHANG H R, ZHANG X H. Contrastive research on practice and application of forest management technology mode in China[J]. Forest Engineering, 2019, 35(4):32-38
[5]蔣小辉,胡川,张官祥,等.自适应式智能树干涂刷装置系统的研制与开发[J].电气技术,2019,20(9):65-68.
JIANG X H, HU C, ZHANG G X, et al. A study on self-adaptive system of intelligent trunk brushing device[J]. Electrical Engineering, 2019, 20(9): 65-68.
[6]翟家怡.一种适应多种地形的树干涂白机器人:中国,CN208880692U[P].2019-05-21.
ZHAI J Y. The invention discloses a trunk whitening robot suitable for various terrains: China, CN208880692U[P]. 2019-05-21.
[7]税梦瑶,李琳.树干涂白机:中国,CN209138928U[P].2019-07-23.
SHUI M Y, LI L. Trunk whitening machine: China CN209138928U[P]. 2019-07-23.
[8]赵曦阳,张秦徽,陈嵩,等.一种组合式树干涂白刷:中国,CN209573725U[P].2019-11-05.
ZHAO X Y, ZHANG Q H, CHEN S, et al. A combined whitening brush for tree trunks: China, CN209573725U[P]. 2019-11-05.
[9]陈浩.树木涂白机的设计及研制[D].赣州:江西理工大学,2015.
CHEN H. Design and development on machine with spraying lime liquid[D]. Ganzhou: Jiangxi University of Science and Technology, 2015.
[10]付秀,辛颖,谷周澎.一种基于人机交互的树干智能涂白装置结构设计[J].森林工程,2016,32(5):55-58.
FU X, XIN Y, GU Z P. Study on structure design of a kind of man-machine interactive-based intelligent trunk whitewashing device[J]. Forest Engineering, 2016, 32(5): 55-58.
[11]GUCCIONE S, MUSCATO G. The wheeleg robot[J]. IEEE Robotics & Automation Magazine, 2003, 10(4): 33-43.
[12]DING X L, LI K J, XU K. Dynamics and wheels slip ratio of a wheel-legged robot in wheeled motion considering the change of height[J]. Chinese Journal of Mechanical Engineering, 2012, 25(5): 1060-1067.
[13]NEGREAN I, SCHONSTEIN C, KACSO K. Study about the dynamics of a translational robot axis based on ball screw transmission[C]// 2016 IEEE International Conference on Automation, Quality and Testing, Robotics (AQTR). 19-21 May 2016, Cluj-Napoca, Romania. IEEE, 2016: 1-6.
[14]段小帥,黄建,刘海.滚珠丝杠舵机传动机构形式分析研究[J].导航定位与授时,2017,4(5):39-42.
DUAN X S, HUANG J, LIU H. Study on transmission mechanism of ball screw actuator[J]. Navigation Positioning and Timing, 2017, 4(5): 39-42.
[15]常青青.树干涂白法防治病虫害[J].落叶果树,2015,47(3):64.
CHANG Q Q. Whitening the trunk to prevent pests and diseases[J]. Deciduous Fruits, 2015, 47(3): 64.
[16]郑志忠.一种多功能背负式电动喷雾器:中国,CN205587194U[P].2016-09-21.
ZHENG Z Z. A multifunctional knapsack electric: China, CN205587194U[P]. 2016-09-21.
[17]韩东,陈子斌.3MF-4型背负式喷雾喷粉机的故障分析与维修方法[J].林业机械与木工设备,2019,47(7):51-54.
HAN D, CHEN Z B. Fault analysis and maintenance method of 3MF-4 knapsack spray duster[J]. Forestry Machinery & Woodworking Equipment, 2019, 47(7):51-54.
[18]DOANT W. Learn raspberry Pi programming with python: Learn to program on the worlds most popular tiny computer[M]. California: Metapress, 2018.
[19]DU Y, ZHANG B, ZHANG C. Maintenance of storage batteries in automatic meteorological observation station[J]. Meteorological and Environmental Research, 2013, 4(Z2):52-53.
