三相笼型异步电动机在线监测系统研究
2021-04-01梁里鹏
刘 攀,张 奎,梁里鹏
(1.山西农业大学信息学院,山西 晋中 030800;2.山西西山晋兴能源有限责任公司斜沟矿,山西 吕梁 033602)
随着时间的推移,电动机发生故障的监控以及故障诊断等技术不断发生改变。作为现代社会生产中常用的机械——笼型异步电动机,采用的是电磁感应等相关理论,主要目的是把电能转变为机械能。为保障电动机可靠运行,降低故障出现率,文章面向其在线监测问题开展了一系列研究工作。
目前我国已处于以计算机、传感器以及网络技术为主要手段的阶段,从发展历程来看,可将其划分为四个阶段:第一,通过操作人员感官感受及简易工具来监测;第二,通过简易故障监测设备来处理;第三,通过更高级仪器进行离线监测;第四,通过相应传感器、计算机、网络等先进手段进行在线监控。随着技术的不断发展,工业自动化技术水平随之提高,生产阶段的电动机故障影响愈发严重。故而,人们对电动机故障监测提出了更高标准,结合电动机监测各个发展阶段可知,前两个阶段以简单故障检测为主,大部分情况下,只有故障发生后才可以被检测发现,但损失已无法挽回,故其已渐渐退出历史舞台;而后两个阶段则得到了进一步发展,特别是在线监测受到了人们高度重视[1]。
1 异步电动机常见故障
1.1 转子断条故障
笼条与端环总体设计有误差,由于笼型异步电动机端环采用整体铸造方式,两者间使用刚性连接,从单个笼条来看,它无法自由伸缩,故而应力常常汇聚于焊接点;电动机焊接效果差、笼条铁芯冲孔工艺差,因为应力点大部分位于笼条和端环焊口周围,当电动机启动或运行振动时,极易出现断条等问题;而如果铁芯槽中笼条冲压达不到要求,电动机运行产生的离心力会出现明显窜动的情况。
电动机工作时自身携带负载长期变动,会导致笼条和端环焊接位置受到极大弯曲应力。启动期间升温过快,电动机停止运行或首次启动失败时,要求等待2h 才能重新启动;若反复启动,电动机温升必将大于自身允许值,导致焊接处直接开焊。重载与反复启动相似,同样会造成电动机大幅升温,使得笼条和端环焊接位置开焊;若未及时解决故障,由于离心力的作用,断条给定子绕组绝缘造成破坏,会带来定子短路问题,或工作人员水平较低,实际维修阶段造成笼条和端环出现形变而带来应力集中问题[2]。
1.2 气隙偏心故障
目前,科技水平存在局限,以及电动机在日常运行后出现磨损等情况,导致转子外缘与定子内缘之间不可避免地存在缝隙,容易发生偏心故障。结合实际情况来看,具体包含静态、动态偏心问题:前者表示电动机定子、转子中心轴未处于同一条直线,相互间气隙分布不均匀,且具有不变性特征;后者是转轴变形、轴承出现磨损等原因引起的,导致偏心随转子的运行而发生动态变化,并没有固定位置。通常情况下,这两种问题会同时存在。
1.3 定子故障
结合国内外相关研究可知,定子绕组故障占比达到40%~45%。定子故障以定子匝间短路、绕组接地与断路情况为主,电动机故障起因比较多,归根结底在于其长期不间断作业,使得相关部件(绕组等)温度过高,绝缘失去存在意义,或其所在运行环境非常复杂,如空气水分、灰尘量较大等,并与其绝缘相互作用,使得绝缘击穿概率大幅提升;也有研究报道称是电动机运转时受到电磁力及机械应力等外力作用导致绝缘受损或破坏,最后引发定子短路故障。一旦电动机出现上述故障,且未第一时间察觉与维护,就会使电动机遭到破坏,而且会影响生产线上的其余设备或者造成停产问题,甚至使整个生产线设备都失去作用[3]。定子匝间短路是多发故障之一,更是一种早期故障,若初期就能察觉故障的存在,便能防止故障程度的加重,尽可能减少各方面的损失。
2 电动机的数学建模
2.1 正常状态下的数学模型
电动机正常状态下,定子绕组三相对称,定子回路连接情况如图1 所示。电动机存在3 个定子回路,假设定子各相电流依次为ia、ib、ic,转子存在n根导条,临近的2条与其向对应的端环组成了1 条回路,共同组成完整的回路,考虑到这一点,总共存在(n+1)条回路,不同回路内部电路依次记作i1、i2、in、ie,由此能够确定,电动机独立回路数是(n+4)。
2.2 定子匝间短路模型
假如电动机A 相出现匝间短路,电动机匝间发生短路相的参数如下:每相绕组串联匝数为w1;如果A 相绕组ad 段发生匝间短路,短路匝数记作wad,rad是指短路绕组自身电阻,短路位置过渡电阻是Rg,而正常串联匝数为w1-wad,短路位置环流为iad,短路线圈内的总电流是ia+iad。关于匝间短路方程,仅需略微变动短路相方程,换言之,如果A 相出现短路,仅用变动A 相对应方程[4]。
对正常情况、转子断条、匝间短路以及气隙偏心发生后笼型异步电动机动态数学模型进行详细分析可知,在任何不同的运行情况下,仅按照实际情况调整参数矩阵便能解决需求。若电动机仅发生一种故障,则故障特征和理论完全一致;若发生两种或多种故障,而故障并不严重时,诊断过程中无需担心故障间彼此影响,这完全吻合电动机故障监测系统初期察觉故障的设计思想,因此此次设计直接忽略故障间的影响问题。
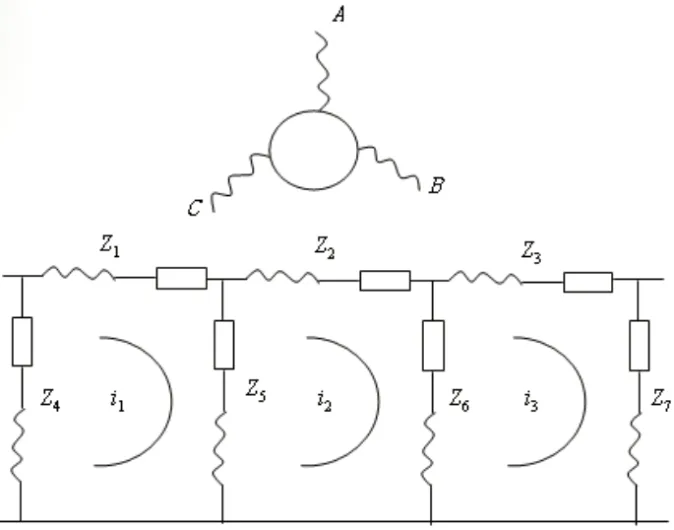
图1 定子回路连接图
3 电动机故障监测系统
3.1 微控制器的选择
从现有单片机兼容性、性价比等角度出发进行分析,经全面对比,此次微处理控制器选择ATMEL 企业旗下的AT89S51 产品。该产品是CMOS 单片机,位数为8 位,其最大特点是运行低功耗且性能研究十分成熟,片内拥有只读存储器,大小为4kB,可重复读取存储1 000 次,具有密度高、存储性能好等优点。AT89S51 能直接调用MCS-51 指令,且和80C51 引脚结构完全相同。AT89S51 功能全面且强大,能满足现今大量控制系统需求。
3.2 信号采集电路
该监测系统应采集电动机相关信息,包括3 个相电压、电流与转子转速。因为异步电动机遵从电磁感应原理实现,通过早期电流电压传感器来处理,容易使被测相位发生变化,且被测量常需要完成滤波处理,所以电流电压信号检测过程中,应采取科学、有效手段克服各种不良因素,防止电动机受到影响。
该系统应选择闭环式霍尔电流、电压2 种传感器,由此得到所需的电流、电压信号。这两种传感器的工作原理在于依靠霍尔元件感应导线附近磁场强度,经分析处理可判断电流电压值。闭环霍尔测量传感器主要工作原理为霍尔补偿,即针对副边、原边线圈感应获得磁场,利用前者缓冲后者对电动机原磁场造成的干扰,在此基础上能够消除测量元件对原磁场的影响。这种电流、电压传感器拥有许多优点,包括测量区间广、准确度高、响应及时、安全可靠等,与此同时,二者体型小巧、重量轻,可大幅降低安装难度。
对于转速测量电路,霍尔元件拥有大量独特优势,如体积小、使用时间长、质量小、安装简易、抗干扰能力强、低功耗、精准度高、线性度理想等。因此,该系统内部转速测量电路同样选择霍尔元件进行处理,把它装于电动机转子位置,可以形成霍尔脉冲信号。
3.3 A/D 转换电路
A/D 转换电路负责将数据从模拟式转变成数字式,作为该系统的重要组成部分,一旦其性能不够理想,分析异步电动机运行状态的准确性也会随之大打折扣,甚至出现错误结果,导致故障不能被及时发现,使该系统失去存在的意义。故障初期,其相应特征并没有展现出来,且频率与基波频率大体一致,因此A/D 转换器精确度必须达到一定程度,才能准确了解电动机运行有无异常。按照上述分析结果,为满足实际应用需求,该系统选择AD7656。
AD7656 主要性能特点如下:运行通道多(6 个)、集成程度高、低功耗。每个通道的采样率均为250kSPS,其内安装有基准电压源以及基准缓冲器。片内放大器具有噪声小、宽幅采样等特点。其接口齐全,串口、并口均有,均可使MCU 及DSP 接收到有效信号。
3.4 锁相倍频电路
为有效跟踪电网频率,此次实现了锁相倍频电路,不仅如此,它还能够给A/D 转换电路带来触发信号,如图2所示。该电路主要有低通滤波器、压控振荡器、相位比较器三个部分。
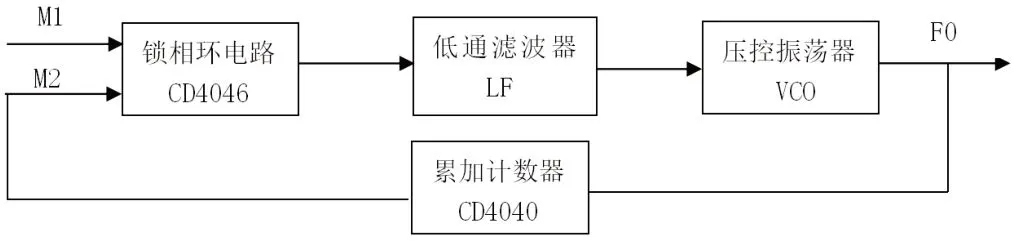
图2 锁相倍频电路
锁相环电路应选取CD4046,分频器应采用12 位二进制CD4040。将CD4040 当作增量计数器,根据Q1,Q2,…,Q12输出情况可判断脉冲数,该电路输出Q1 ~Q9,检测输出脉冲为512 次。
4 结束语
文章探究了异步电动机的应用及监测系统发展现状,根据对其运行阶段常见故障的分析,让故障形成初期就能得到有效检测,同时判断具体类型。通过现代传感器与计算机技术的有效融合,实现笼型异步电动机在线监测系统。该系统是基于计算机的电动机在线监测系统,可动态监控电动机的运转情况,并可采集与调控相关运行数据,提高了异步电动机的运行效率。
