新能源汽车制动防抱死系统研究与优化
2021-03-31徐艺方
徐艺方
(烟台汽车工程职业学院 经济管理系, 山东 烟台 265500)
0 引言
在汽车紧急制动情况下,防抱死制动系统能够使车轮抱死现象得以有效规避,逐渐成为现代新能源汽车的一项标准配件,成为衡量汽车安全性能的重要指标之一,防抱死制动系统在预测到可能出现车轮抱死时,通过对制动压进行自动调节实现车轮抱死的预防功能,有效地避免车辆出现甩尾现象。在防抱死功能的作用下能够保证轮胎工作在滑移率曲线的峰值点附近,使方向盘难以旋转、车辆转向不稳定成制动距离过远等问题得以有效地避免,进而提高汽车的安全性能。
1 设计分析
基于传统制动系统发展而来的防抱死制动系统(ABS)作为一种安全装置,其主要功能在于通过获取最有效地制动力以防止车轮抱死(可缩短制动距离),ABS系统对车辆制动力的自动调节过程,主要通过相应智能控制技术的运用以及对道路粘着力的充分利用实现。作为一种汽车的主动安全装置,ABS能够在汽车紧急制动过程中使车轮抱死问题得以有效解决,通过对行驶路面摩擦力的充分利用实现最有效的制动力的获取,同时兼顾汽车转向能力与横向稳定性,进而使新能源汽车行车安全性得到有效提升。
目前,在ABS系统比较常用的控制方法中,成本较低的逻辑门限控制算法应用较为普遍,但该控制方法存在控制性能与控制精度不高、控制逻辑复杂程度较高和不易调试的明显不足,并且响应速度和稳定性也有待提升,市面上已开发完成的ABS装置对新能源汽车的适用性较差,难以应用到不同车型上。使用模糊控制算法或PID控制算法设计的控制器解决了部分上述问题,在有些方面取得了较佳的效果,但整体性能仍有待提升。为此,本文充分利用了模糊控制与PID控制两类算法的控制优势,将ABS控制过程分为不同阶段,通过使用不同控制算法实现ABS系统性能的明显改善,同时考虑到不同的行驶路面会对滑移率产生不同影响,设计了一种路面识别系统,可针对不同路面自动选择相应的最佳滑移率,有效提高了ABS系统选择参考滑移率的精确率[1]。
2 汽车防抱死制动系统优化设计
2.1 ABS系统总体设计
在汽车控制系统中,ABS系统是重要组成部分,ABS系统控制原理主要是讲车轮的滑移率控制在目标值范围内,避免高速行驶的汽车在路面上尤其是复杂路况下发生甩尾或漂移等危险情况,尽量缩短汽车的制动距离并实现平稳制动过程。ABS系统总体功能示意图,如图1所示。
该系统主要由负责信息的感知、决策和执行3大模块构成。信息感知主要通过使用车轮传感器实现轮速的实时获

图1 ABS系统总体功能示意图
取,再将信息传送至决策模块;信息决策通过调用ABS控制器中相应的数学模型实现最佳制动力矩的获取,使车辆轮胎始终维持在最佳滑移率附近;信息执行根据得到的刹车力矩实现对车轮的有效控制过程(通过执行机构完成)[2]。
2.2 制动过程的动力学建模
本文针对汽车单轮阐述制动动力学模型的构建方法,如图 2 所示。

图2 单轮制动动力学模型

(1)
(2)
假设,Fz(t)表示车轮法向载荷;t表示制动时间;λb和μ(λb)表示滑移率及路面附着系数,则路面制动力Fxb表达式,如式(3)。
Fxb=μ(λb)×Fz(t)
(3)
根据Burckhardt 轮胎模型,假设,c1,c2,c3均表示由路面条件决定的路面附着特性参数,路面附着系数表达式,如式(4)。
μ(λb)=c1(1-e-c2λb)-c3λb
(4)
待定系数c1、c2和c3根据式(4)并结合路面的峰值与滑动附着系数实验结果计算获取,结合在不同路况下滑移率的变化进行制动力系数特性曲线的绘制,如图3所示。

图3 不同路况下附着系数的特性曲线
令v=λb,u=Tb,Δ1=Δr,Δ2=Δ1,据此等效转化式(1)和式(2),得到仿射非线性动力学状态,如式(5)。

(5)
3 ABS控制器设计
3.1 ABS控制器相应数学模型的构建
3.1.1 车辆动力学模型
排除外界因素的影响,只考虑车辆纵向运动,结构较为简单的车辆单轮模型适用于分析汽车ABS系统的性能。单轮模型,如图4所示。
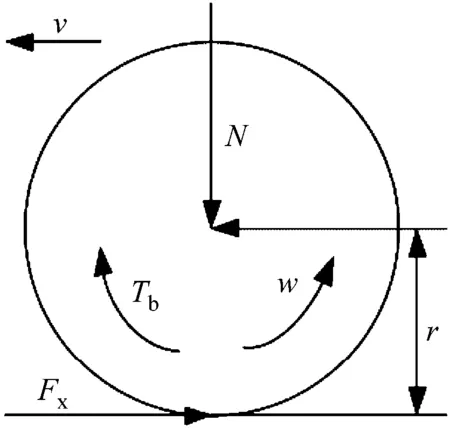
图4 单轮车辆模型
假设,M表示汽车的1/4的质量;v表示汽车车速;r表示车轮半径;Fx表示车轮与地面的摩擦力;μ表示车轮纵向附着系数;w表示车轮的转速;I表示转动惯量;Tb表示制动力矩;N表示车轮受到的垂直载荷,从而得出汽车的动力学表达式[4],如式(6)。
(6)
Fx=μN
3.1.2 轮胎模型
本文采用两个线段方程表示的双线性模型作为研究对象,此模型具有拟合精度高、易于模拟仿真的优势,考虑到不同路面具有不同的摩擦力特性,假设,s表示滑移率,针对高、中、低附3种附着系数,来构建不同的双线性模型,如式(7)。


(7)
3种附着系数的μ-s关系曲线[5],如图5所示。

图5 μ-s关系曲线图
3.1.3 制动器模型与滑移率模型
P表示制动轮缸压力;Tb表示制动力矩,忽略该模型的非线性特性以简化仿真研究过程,模型表达式,如式(8)。
Tb=KP
(8)
进而可得出式(9)。
(9)
在车辆制动状态下,车轮与地面间相对滑动的程度可通过滑移率模型完成量化表示,如式(10)。
(10)
3.2 ABS控制器设计
模糊控制具有较快的动态响应速度,模糊控制系统的输入通常为系统偏差及相应的变化率,但稳定性不足;稳定性较佳的PID控制则存在动态响应速度方面的不足,因此本文结合运用这两种控制方式完成了一种ABS控制器的设计,汽车开始制动时,先对行驶路面进行识别,获取相应的轮胎模型,然后再以不同的轮胎模型为依据完成相应ABS控制器的选用。本文以高附着系数的ABS控制器为例,阐述了具体的设置方法,其他两类的参数设置原理相同,系统输入和输出主要依据滑移率偏差和车轮的角速度变化率,当滑移率偏差超过阙值时,模糊控制器开始启动,有效提升动态响应速度;当滑移率偏差低于阙值时使用PID控制器,以提高系统的稳定性[6]。
3.2.1 路面识别系统设计
路面最佳滑移率会随着峰值附着系数的变化而变化,汽车防抱死制动系统如果无法精确的选择参考滑移率将会降低系统控制精度,当ABS系统以滑移率作为主要控制目标时,需基于有效的路面识别完成最佳滑移率的设定。对行驶于不同路面上的汽车在相同时间内施加相等的制动力矩,峰值附着系数(同角速度变化量相互对应)根据车轮角速度变化量的实测值与理论值相等的关系计算得出,ABS控制器的轮胎模型即以峰值附着系数为依据选用的相应双线性模型。对汽车在[0,t1]时间段内施加T0大小的制动力矩,根据上文给出的关系式计算角速度变化量表达式[7],如式(11)。
(11)
在t的取值为0和t1时,车轮角速度分别为w0和w1,则角速度变化量为Δw2=w1-w0。μ值通过令Δw1=Δw2计算得出,将上述试验在不同路面上重复进行多次,然后将角速度变化量的峰值附着系数进行划分,在此基础上得到相应轮胎模型的对应表,并保存到存储器中。
3.2.2 模糊控制器设计
不同于传统控制系统,模糊控制系统无需使用到被控对象的结构、机理或数学模型,通过控制经验对输入输出数据进行分析与归纳,便能够得出相应的模糊规则,然后根据模糊规则来选定输入输出变量,最终确定控制器主要变量,模糊控制能将控制经验和知识基于相应的推理规则(采用语言变量描述)进行表示,并据此完成决策控制[8]。
(1) 模糊推理
模糊推理重点在于对输入模糊量进行近似推理,模糊规则根据ABS的控制经验可得出:滑移偏差率越大,滑移偏差率变化率越高;车轮角速度变化率越大,滑移偏差率越高。被均分为五档的滑移偏差率及其变化率通过组合搭配可得出25条模糊控制规则表,如表1所示。

表1 模糊控制规则表
(2) 反模糊化
反模糊化主要负责完成模糊量与实际量之间的转换,采用面积中心法。假设,U表示论域;A表示集合;A在U上的隶属函数A(u)表示(u∈U);Ucen表示面积中心对应的横坐标,其计算表达式,如式(12)。
(12)
4 实验测试与结果分析
分别针对高、中、低三种不同附着系数的路面进行仿真分析,测试本文ABS控制器与控制算法的有效性,初始状态下的汽车与本轮速度均为20 m/s。
(1) 当附着系数高时,汽车行驶过程中,最佳滑移率与峰值附着系数为0.2和0.84,此时的滑移率、速度及刹车距离曲线,如图6所示。
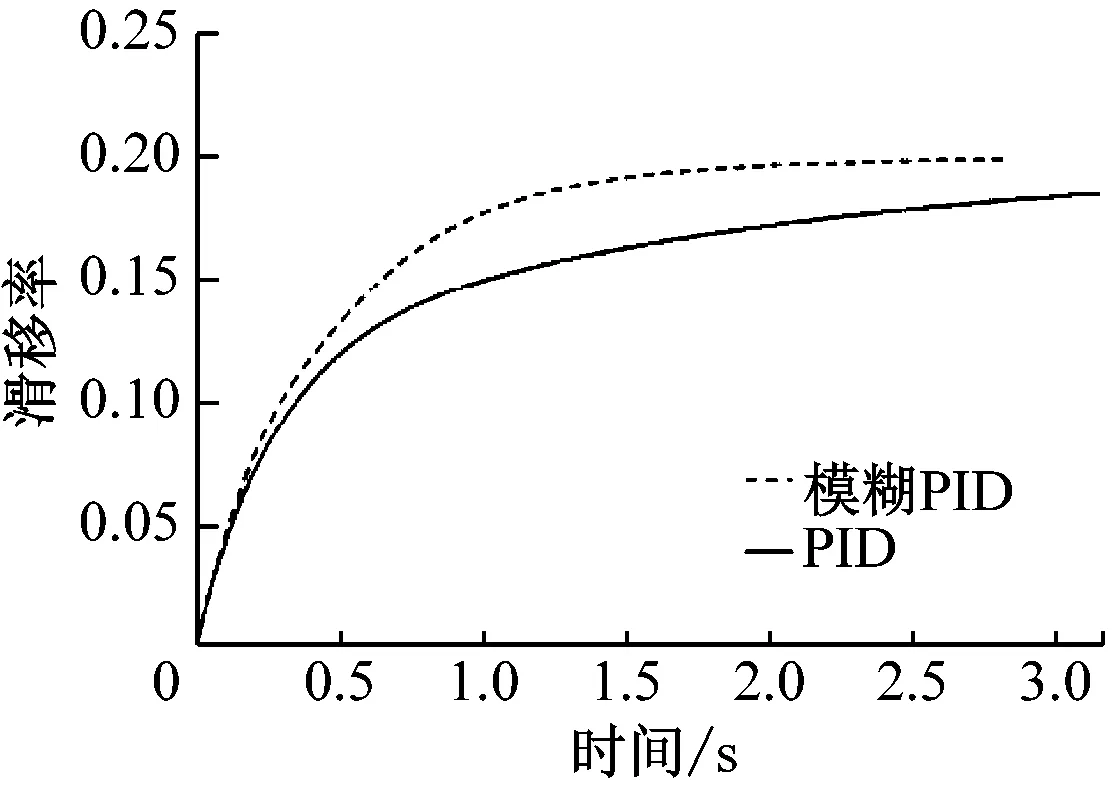
图6 高附着系数下的滑移率、速度及刹车距离曲线
在PID控制器的作用下,汽车的刹车距离为35.9 m,停车所用时间为3.2 s,在此过程并未达到最佳滑移率;在PID控制器作用的基础上,刹车距离为32.22 m,停车所用时间为2.85 s,最佳滑移率于2 s时达到并在后续时刻得以维持。
(2) 当附着系数中等时,汽车行驶过程中最佳滑移率和峰值附着系数为0.18和0.63。在PID控制器作用的基础上,汽车的刹车距离为48.12 m,停车所用时间为4.12 s,3.4 s时达到最佳滑移率。
(3) 当附着系数低时,汽车行驶过程中,最佳滑移率与峰值附着系数为0.15和0.2,汽车停车所用时间为12.27 s,刹车距离为141.78 m;在PID控制器作用的基础上,汽车停车所用时间为11.25 s,刹车距离为116.58 m, 1.3 s时达到最佳滑移率。
该控制器能对车轮角速度进行实时动态的调整(以汽车运动状态的变化情况为依据),提供给车轮最大纵向附着力确保轮胎能够在最佳滑移率下进行工作,证明模糊PID控制方法具有更快的响应速度,能够有效地控制刹车时间,缩短刹车距离。
5 总结
为弥补传统的汽车防抱死制动系统在响应速度、控制性能和控制精度等方面存在的不足,本文利用PID控制较高的稳定性优势及模糊控制的快速响应优势,构建了一种模糊PID控制算法,在此基础上完成了一种ABS控制器和路面识别系统的设计,对于不同特性的路面,ABS控制器通过使用路面识别技术实现了最佳滑移率的自动选择。经过仿真模拟证实该防抱死控制系统能够缩短刹车时间和距离,而且具有比较灵敏的响应速度,能够进一步改善刹车性能。
