基于气压传动的苹果采摘机器人末端执行器的设计
2021-03-30赵竹
赵竹

摘 要:随着我国苹果种植规模化的发展,苹果采摘机器人成为苹果机械化生产环节中最重要的一环。本文以苹果为采摘对象,研究苹果的物理性质,分析苹果采摘末端执行器组成和工作原理,结合当前苹果采摘末端执行器结构存在的不足,设计一款基于气压传动原理的苹果采摘末端执行器。
关键词:气压传动;苹果采摘;末端执行器
Design of end-Effector of Apple Picking Robot based on pneumatic transmission
Zhao Zhu
Liaoning Agricultural Technical College LiaoningYingKou 115009
Abstract:With the large-scale development of apple planting in China,apple picking robot has become the most important link in the mechanization of apple production.Taking apples as the picking object,this paper studies the physical properties of apples,analyzes the composition and working principle of the apple-picking end-effector,and designs an apple-picking end-effector based on the pneumatic transmission principle in combination with the deficiencies of the current apple-picking end-effector structure.
Key words:Pneumatic transmission;Apple picking;End-Effector
我國是世界最大的苹果种植国,产量和面积均占世界50%以上。随着苹果种植规模化和机械化的发展,苹果采摘机器人成为苹果机械化生产环节中重要一环。苹果采摘机器人最重要部位为末端执行器,末端执行器直接关系采摘质量,是整个苹果采摘机器人研究的热点和难点。一些西方发达国家在苹果采摘机器人方面研究起步早,设计出多款末端执行器,但采摘效果不理想[1]。我国对苹果采摘机器人研究起步晚,在末端执行器的设计方面存在很多不足。随着我国苹果规模化种植的发展,苹果采摘机器人需求越加强烈,设计合理高效的末端执行器具有重要现实意义。
1 采摘苹果的物理特性分析
苹果的物理特性是末端执行器设计的依据[2]。机器人采摘苹果时,手指夹持力要适宜,所施加的夹持力既不能损伤果实又要保证果实不掉落,这就需要事先对采摘对象苹果的基本物理特性和力学特性进行充分研究。
1.1 基本物理特性
根据中华人民共和国农业行业标准NY/T439-2001《苹果外观等级标准》规定,按照苹果主要品种单果重等级要求划分为特等果、一等果和二等果,规格划分如下表所示;国家标准GB/T10651-2008《鲜苹果》规定,苹果直径≥60mm为一等果,直径≥55mm为二等果。
1.2 力学特性
在利用末端执行器进行苹果夹持采摘作用时,苹果所受力学特性的相关性对作业效果影响最大。
(1)压缩、拉伸、剪切特性。苹果采摘过程,末端执行器对苹果枝条做功,施加压缩、拉伸和弯曲三种应力,三种应力不是单纯存在,是综合作用。有研究学者对苹果树枝所能承受的综合型应力进行研究,西北农林科技大学全朋坤在苹果成熟季树枝力学综合应力研究、苹果树枝的力学试验与其结构参数的联系等文章中,通过试验找到苹果树枝能承受破坏的阀值,从苹果树枝抗压最大弹性强度为261394MPa,屈服阶段强度为8.57399MPa,弹性模量为13777546MPa,树枝抗拉最大弹性强度为655138MPa,屈服阶段强度为846630MPa,弹性模量为8168531MPa,树枝的弹性弯曲正应力为76.02595MPa[3]。
(2)黏弹性特性。我们把苹果作为同时具有弹性和黏性两种特性的黏弹性体处理,先在农产品上施加一定负荷,变形量会随着时间增加而增加,这种现象称为蠕变。
四要素模型用式子表示时刻t的变形:
(3)摩擦特性。为使末端执行器能适当地夹持苹果,需掌握苹果的摩擦因数。通常采用倾斜法测定摩擦因数及滚动稳定角。查阅资料发现摩擦因数在0.3~0.9范围内变化,具体数值与表面粗糙度有关;静态稳定角在11°~18°;动态稳定角在2.5°~5°,具有与静态稳定角相反的倾向。
此外,苹果电气特性和其他特性对末端执行器的设计均有影响,有效利用苹果的特性,可实现苹果采摘机器末端执行器的高效设计。
2 苹果采摘末端执行器组成和工作原理
苹果采摘机器人主要通过各种传感器检测苹果位置,利用自动控制技术控制末端执行器实现空间移动、转动等动作,完成对检测出苹果果实的采摘。苹果采摘末端执行器作为采摘机器人的重要组成部分,由夹持机构(或吸引机构)、切割机构、动力装置、控制装置及传动装置组成。工作方式主要有两种:第一种方式是模仿人类采摘动作。末端执行器上设计夹持机构,利用夹持机构对果实进行夹持,再利用腕关节的转动模拟人掰拧果柄的动作或利用切断机构对果柄切断(或者烧断)[4]。这即需要控制适宜的夹持力又需要控制适宜的切断力。第二种方式是利用吸引力将苹果吸入末端执行器中,再利用切断机构或其他方式将果柄打断(烧断)。这种机构的一个优点是可以吸收并消除末端执行器和果实的位置偏移。
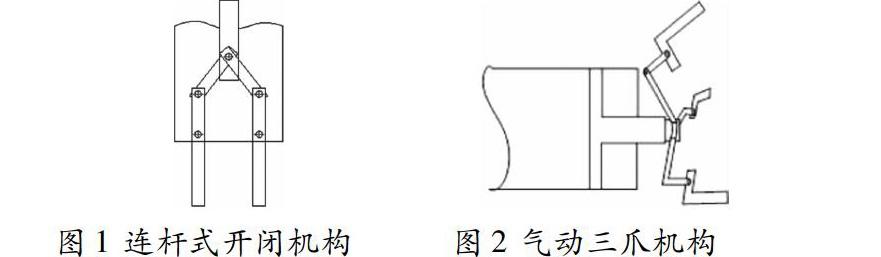
夹持机构分为手指以支点为中心开闭型、手指平行开闭型、多指机械手型以及SMA型。手指以支点为中心开闭型,如图1所示,这种机构类似剪刀一样,由前后直线运动的推杆和手指、连杆构成,推杆的直线运动通过连杆传递到手指,手指以支点为中心开闭,手指开闭时前端运动轨迹为弧形;手指平行开闭型,是相对按照的手指保持平行状态进行开闭动作的机构,常采用平行连杆传动机构或者是齿轮齿条传动机构;多指机械手是包含三个以上手指的末端执行器;SMA型是形状记忆合金,接通电流就可以自动变形和运动。
切断机构通常采用刀片进行切割,也有在电级上施加高频高压电,利用热能来烧断果梗,这种方式可以控制水分蒸发与染病。
3 苹果采摘机器人末端执行器结构设计
3.1 苹果采摘末端执行器夹持机构的设计
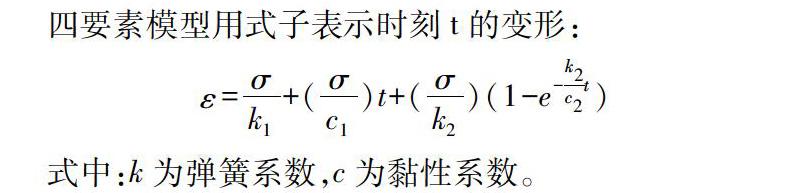
本文设计苹果采摘机器的末端执行器是采用夹持和切割方式。夹持装置首先将苹果夹持,然后切割装置對果柄进行切割,待切割装置完成切割动作后,夹持装置将苹果放入指定位置,夹持装置和切割装置运动由气压传动装置提供。末端执行器的机械结构如图2所示,是一种气压驱动的三爪式夹持机构。夹持机构主要由三个采摘爪、三组摇臂以及气缸组成,当气缸活塞向左移动时,三个采摘爪呈闭合趋势;当气缸活塞向右侧移动时,三个采摘爪则打开。采摘苹果时,采摘爪能够根据苹果重量及大小自由调节,保证采摘爪夹持在苹果的关键部位,保证夹持力度恰当。在实际使用时,还可在采摘爪上套柔性海绵材料和橡胶套,保证采摘爪有足够缓冲,并保证足够的抓取摩擦力。
3.2 苹果采摘末端执行器切断机构的设计
人工采摘苹果时,果柄需尽可能剪短保证苹果装箱后,果柄不会损伤相接触处苹果的果皮,便于保存和运输,在以往的切割装置设计中,对这一要素考虑较少。切割力大小要适宜,如果切割力太大会增加末端执行器的重量和尺寸,对苹果采摘机器整体造成不必要的负担;如果切割力太小,不能顺利切断果柄,无法完成切割任务[5]。因此必须根据苹果果柄的物理特性,测定果梗切断阻力,并以此为依据设计切断机构。本文中的切断机构采用刀片式结构,分为动刀片、静刀片及气缸等部分组成,动刀片和静刀片采用窄式加长设计,可以有效插入苹果果梗有效作业区域,避免对其他关联枝条的影响。苹果采摘末端执行器受机器视觉和机械手臂影响很大。机器视觉检测位置会存在误差,影响末端执行器的工作。机械手臂在伸缩、移动和旋转过程中会出现位移偏差,也会影响末端执行器的最终作业效果,所以苹果采摘末端执行器要具备对于机器视觉和机械手臂等机构误差的鲁棒性。
4 结论
苹果采摘机器人是未来果园机械化作用中重要一环,研究末端执行器提高采摘效率具有现实意义。本文对采摘对象苹果的基础物理特性、力学特性和其他特性进行研究分析,提出一种基于气压传动末端执行器的结构设计。在此基础上,探索更加优化的采摘方式和结构是今后的研究方向。
参考文献:
[1]李建伟,陈艳艳.苹果采摘机器人末端执行器的原理及试验研究[J].农机化研究,2017,39(09):139-142.
[2]乔海龙,李卫国,王利利.基于TRIZ理论的苹果采摘机器人末端执行器的设计[J].机电信息,2016(09):113+115.
[3]全朋坤,等.苹果成熟季树枝力学综合应力研究[J].科技创新与应用,2016(21):17-18.
[4]杨文亮,等.基于气压驱动的球状果实采摘机器人末端执行器研制[J].农机化研究,2019,41(11):149-154.
[5]近藤直.农业机器人[M].北京:中国农业大学出版社,2009.
