基于浮标平台的海洋生物化学要素原位监测仪器研制与近海实验研究
2021-03-30周志盛陈良培章逸舟李剑平
陈 巍 陈 涛 张 亮 周志盛 祝 铭 陈良培 刘 鹏 章逸舟 李剑平
(中国科学院深圳先进技术研究院 深圳 518055)
1 引 言
海洋占据地球超过三分之二的面积,是生命的起源,也是未来的粮仓,在人类发展历程中发挥着至关重要的作用,而人类对于海洋的探索和开发从未止步。随着人类活动的加剧,海洋污染问题日益严重。作为大陆和海洋的连接带,近岸海域是人类和海洋交流活动最频繁的区域,也是污染最为严重的区域。国家海洋局发布的《2019 年中国海洋环境状况公报》显示,我国近岸海域环境问题依然突出。部分近岸海域污染依然严重,陆源入海污染居高不下,陆源入海排污口达标排放率仍然较低,88% 的排污口邻近海域水质不能满足所在海洋功能区环境质量要求。
为了监测和保护海洋环境,国家制定了严格的近岸海水监测规范和标准,如《海水水质标准》(GB3097-1997)[1]和《近岸海域环境监测规范》(HJ442-2008)[2]。这些标准详细规定了海水水质分类标准、监测参数种类和方法等,为海洋环境的评价提供了权威的评价标准。但是,这些标准中规定的海水水质监测方法多为化学方法。以测量化学需氧量(Chemical Oxygen Demand,COD)的碱性高锰酸钾法(GB17378.4-2007)为例,测量过程中不仅需要加热、滴定等人工操作流程,还涉及到高锰酸钾、碘化钾和硫代硫酸钠等化学试剂[3]。虽然这种测量方法作为海水测量的金标准,测量精度高、重复性好,但测量时间长、操作复杂,容易造成二次污染,并不能实时准确地反映海水当前的状态,也无法实现海水水质长期连续原位监测。
随着光学技术的进步,基于光谱分析的水质原位监测技术得到了快速的发展和应用。海水中不同的物质存在不同的光学性质,通过特定的方法测量这些光学性质,可以间接反映海水的各种参数。叶绿素 a 分子在特定波段光源照射下可以被激发出荧光,且一定范围内激发荧光的强度与水中叶绿素 a 浓度成正比例关系[4];水体中类色氨酸物质荧光峰(T2, 280nm/360nm)与五日法生化需氧量值(Five-day Biochemical Oxygen Demand,BOD5)具有最强线性相关性[5-6];根据分子的选择性吸收原理,大部分有机物中外层电子跃迁吸收的光子能量集中在紫外-可见波段[7],而有机物是水体中 COD 的主要贡献物质。因此,可以通过测量水体的荧光或吸光特性,来计算叶绿素 a、COD 和 BOD 浓度。这些光学测量方法,具有检测速度快、灵敏度高、无需化学试剂等优点,已经广泛地应用于水质原位测量,并已有商业化产品出现,如测量叶绿素 a 的 ECO FL 系列产品(美国海鸟科技公司),测量 COD 的 S::CAN 系列产品(奥地利势能公司)和测量 BOD 的 Uvilux 系列产品(英国 CTG 公司)。但是,这些产品大都针对淡水环境使用,在海水中的准确度、可靠性和使用周期存疑。特别是对于海水长期腐蚀和生物附着环境,缺乏针对性的设计和研究,无法在海洋原位环境下长期使用。
另一方面,作为海洋生态系统和海洋食物链和食物网基础,浮游生物生命周期短,对水质变化敏感,能够较为准确地反映水质的变化情况,更需要在原位状态下进行长时间监测,但一直缺乏相关的技术手段和方法[8-11]。美国 Coastal Ocean Vision 公司研制的连续颗粒物成像分析仪——CPICS(Continuous Particle Imaging Classification System)[12-13]和美国 Scripps 海洋研究所研制的浮游生物照相系统——SPC(Scripps Plankton Camera System)[14-15],初步实现了对于浮游生物的长期原位观测。但目前上述国外仪器仍处于科研样机的阶段,未能装备化应用于海洋监测,也尚未有部署于浮标平台的记录,未针对中国近海的水体环境进行研究和优化,也未建立近海海域的浮游生物数据库,无法直接用于我国近海的浮游生物观测。国内方面,中国海洋大学团队开展了一些相关的工作,并在 2018 年报道了一台可以在水下采集浮游生物多个放大倍率图像的浮游生物粒径谱监测系统的科学样机[16],但国内也未见将浮游生物原位检测技术用于近岸浮标上进行长时间水下监测的报道。
本文在科技部重点研发计划项目的支持下,开展基于光学传感的海水叶绿素 a、COD 和 BOD 传感器和浮游生物成像仪的研制,完成传感器与浮标平台的集成,并在广东省深圳市大亚湾海域开展了连续 6 个月以上的海试研究,实现了上述参数长期原位观测,为海洋环境监测提供了新的技术手段。
2 海洋生化要素原位传感器研制
2.1 海水叶绿素 a 原位传感器研制
2.1.1 海水叶绿素 a 原位传感器检测原理
叶绿素 a(Chlorophyll a)是植物光合作用的主要色素[17],广泛存在于海洋浮游植物体内。测定海水中叶绿素 a 含量,不仅能间接反映海水浮游植物的生物量,而且可以推算海洋初级生产力,是评估海水水质、了解海洋生态系统的重要参数[18-19]。
叶绿素 a 吸收特定波段的激发光,能辐射出波长比激发光更长的荧光,在一定浓度范围内荧光强度与叶绿素 a 浓度成线性比例,因此通过测量荧光信号强度可以检测叶绿素 a 浓度[4]。据 Babin[20]报道,叶绿素 a(溶于丙酮)在可见光波段有两个吸收峰,分别是以 430 nm 为峰值的蓝光吸收波段和以 662 nm 为峰值的红光吸收波段,两个荧光发射峰波长分别在 668 nm 和 710 nm。然而,对于海水浮游植物的在体叶绿素 a,吸收峰和荧光发射峰波长往往发生红移,如矮海链藻的吸收峰波长为 440 nm、荧光发射峰波长为 685 nm[20]。图 1 所示为利用分光光度计实测叶绿素 a 标准品溶液(无水乙醇)得到的吸光度光谱曲线。
2.1.2 海水叶绿素 a 原位传感器设计与工程实现
叶绿素 a 传感器采用单石英玻璃平面窗口,激发光源透过窗口照射探测区域的叶绿素 a 并激发荧光,荧光透过窗口被传感器探测,如图 2 所示。整个探测器设计包括激发光源、探测光路和探测三个部分。
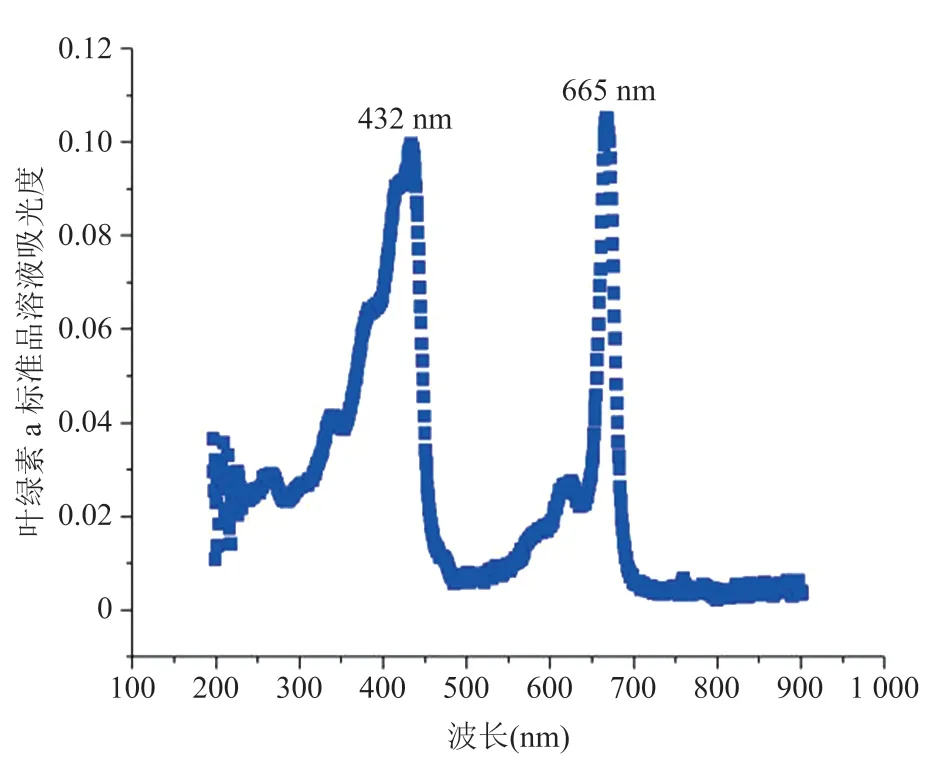
图1 叶绿素 a 标准品溶液(无水乙醇)吸光度光谱曲线Fig. 1 Spectra of light absorption by pure chlorophyll a dissolved in alcohol
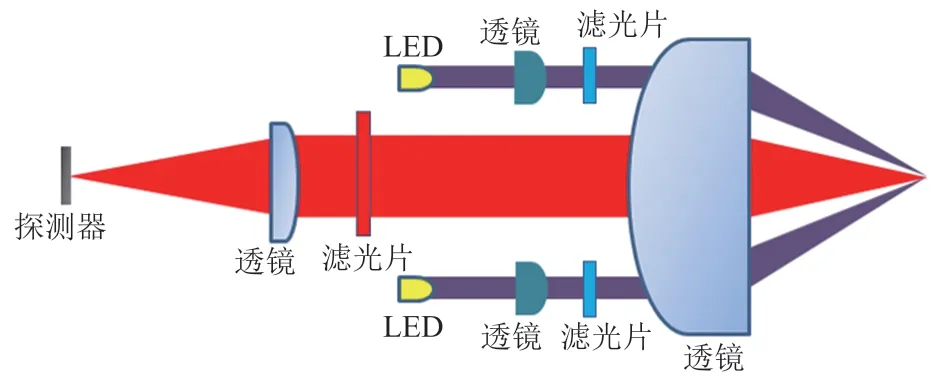
图2 海水叶绿素 a 原位传感器光路图Fig. 2 Light path diagram of the in-situ chlorophyll a sensor
传感器采用蓝光 LED 作为激发光源,具有体积小、功耗低的特点,而且 LED 端部带有玻璃透镜,出射光束发散角小。探测器采用高灵敏度硅基光电二极管,光响应度高、噪声低,结合低噪音光电转换放大电路,可实现微弱荧光探测与光电转换。为了提高传感器的灵敏度和信噪比,增强传感器荧光探测能力以及对干扰光影响的抑制能力:一方面,通过光路结构优化设计,提高探测区域的激发光功率密度,使探测区域内叶绿素 a 激发出更强的荧光,同时使探测区域与探测器感光面形成共轭匹配,限制杂散光和环境光进入探测器。另一方面,采用蓝光滤光片过滤 LED 光源中的红光成分,避免其对荧光产生干扰,同时在荧光探测光路中设置红光窄带滤光片,过滤光源在透镜和窗口的反射光、光源在水中散射光、环境光以及水中其他物质荧光。荧光滤光片采用高性能干涉型带通滤光片,通带内透过率高,在 LED 光源波段截止深度大。此外,为了进一步抑制环境光的影响,使传感器能够在复杂的海水原位条件下正常工作,传感器采用交流调制的工作方式,通过脉冲方式触发 LED 光源激发相应脉冲荧光,荧光对应于固定频率的交流信号,而环境光则是直流以及低频信号,通过滤波方法实现荧光信号和环境光信号的分离。本文所设计的传感器结构和实物图如图 3 所示。
图3 海水叶绿素 a 原位传感器设计图 (a) 与实物图 (b)Fig. 3 Design drawing (a) and the in-situ chlorophyll a sensor photo (b)

表1 海水叶绿素 a 传感器性能指标表Table 1 Specifications of the in-situ chlorophyll a sensor
经第三方出具的检测报告,海水叶绿素 a 传感器参数如表 1 所示。同时作为比对,表 1 还列出了国际知名产商 Turnerdesigns 的一款先进产品 CYCLOPS-6K 的参数。从表 1 可以看出,所研制的传感器在外形尺寸、重量、功耗与 CYCLOPS-6K 相当,但检测限指标 0.01 μg/L 优于 CYCLOPS-6K。目前国际上商业产品检测限普遍在 0.02~0.1 μg/L,检测限达到 0.01 μg/L 的产品鲜有报道。此外,Zeng 等[4]对已报道的 18 种叶绿素原位传感器(系统)进行了总结,其中检测限最高为 0.01 μg/L。这表明本文所研制传感器检测限指标达到国际先进水平。
2.2 海水 COD 原位传感器研制
2.2.1 海水 COD 原位传感器检测原理
化学需氧量是指在一定条件下,水中的还原性物质被氧化分解时所消耗氧化剂的数量,单位以氧的浓度(mg/L)表示。化学需氧量反映的是水体受还原性物质污染的程度,这些物质包括有机物、亚硝酸盐和硫化物等,其中有机物是主要污染源[7]。
如图 4 所示,根据 Lambert-Beer 定律[21],光强为 I0的入射光,传输经过厚度为 L 的溶液池后,透射光强 I 满足公式(1):其中,k 为摩尔吸光系数,与吸收物质的性质及入射光的波长 λ 有关;C 为溶液浓度。

定义吸光度 A 如下:

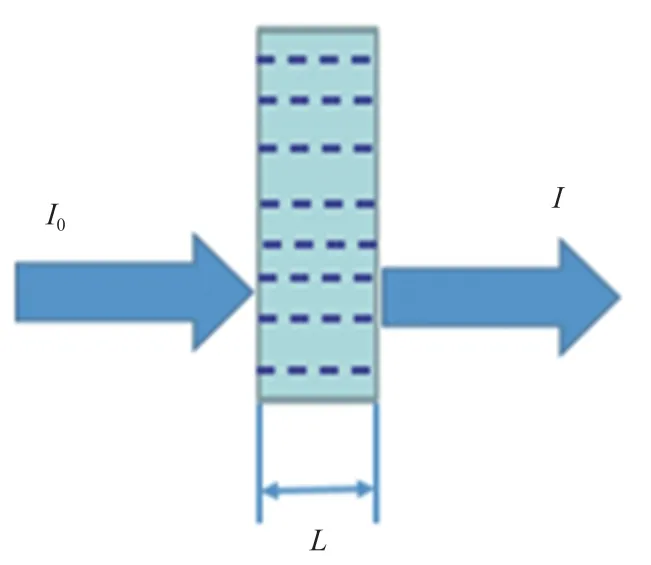
图4 Lambert-Beer 定律原理图Fig. 4 Principle of Lambert-Beer Law
可知,当溶液厚度一定时,吸光度与溶液的浓度成正比。换言之,在固定吸光光程下,测量溶液的吸光度可以计算溶液的浓度。作为 COD 主要贡献物质的有机物,其中外层电子跃迁吸收的能量大都在紫外-可见波段。因此,通过测量海水紫外-可见波段的吸光度,可以计算海水中有机物等物质的浓度,进而间接计算海水 COD 值。
实际研究过程中,需要建立大量海水吸光度值与国标法测量 COD 值之间的对应数据集,并通过科学统计学建模方法来实现 COD 值的精确测量[22-24]。
2.2.2 海水 COD 原位传感器设计与工程实现
为了获得稳定的吸光度数据,本文采用全光谱和双光路结构设计海水 COD 原位传感器,如图 5 所示。照明光源选择脉冲氙灯,其光谱范围覆盖 185~2 000 nm。氙灯光源发出的光直接经由光纤输出,被光纤分束器分为两路:其中一路作为参比光路,经过封住纯水的石英池吸收后,再由光纤输入到光谱模块 1;另一路作为探测光路,直接通过开放式探测光路中的海水吸收后,再由光纤接收输入到另一个光谱模块。两个光谱模块响应波段 190~650 nm,信噪比 1 500∶1,光学分辨率可达 1 nm。针对海水 COD 浓度较低的特性,本文详细研究了测量光程对检测限和测量范围的影响,选取合适的测量光程,满足海水 COD 测量范围和检测限的检测需求。
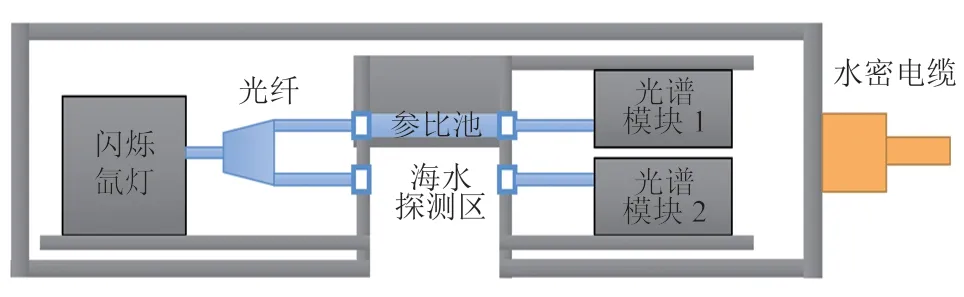
图5 海水 COD 原位传感器光路图Fig. 5 Light path diagram of the in-situ COD sensor
氙灯光源发出的宽波段光信号,经过探测光路和参比光路产生各自的光谱信号,分别被两个光谱模块采集探测。通过两路光信号的标定、校正后可计算海水的吸光谱,再通过光谱预处理、去噪、浊度补偿和统计学建模方法后,即可计算出 COD 值。
本文所设计的海水 COD 原位传感器工程样机如图 6 所示。
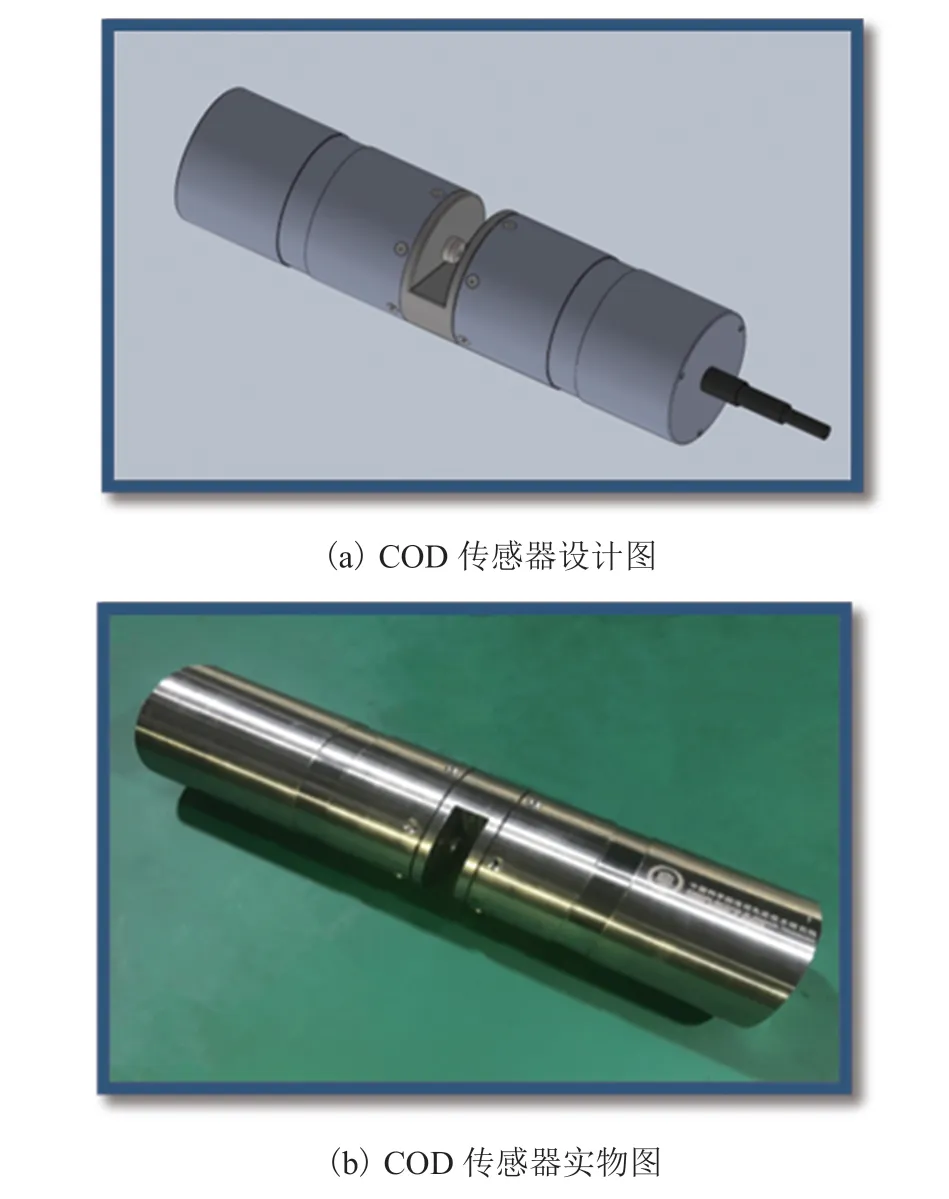
图6 海水 COD 原位传感器设计图(a)与实物图(b)Fig. 6 Design drawing (a) and the in-situ COD sensor photo (b)
经过第三方出具的检测报告,传感器的参数如表 2 所示,其检测限、检测范围可以媲美国际知名品牌的 COD 传感器。本文针对海水长期原位观测进行了针对性的设计优化,这种可以长期布放于浮标平台完成海水 COD 原位监测的传感器鲜见报道[25]。
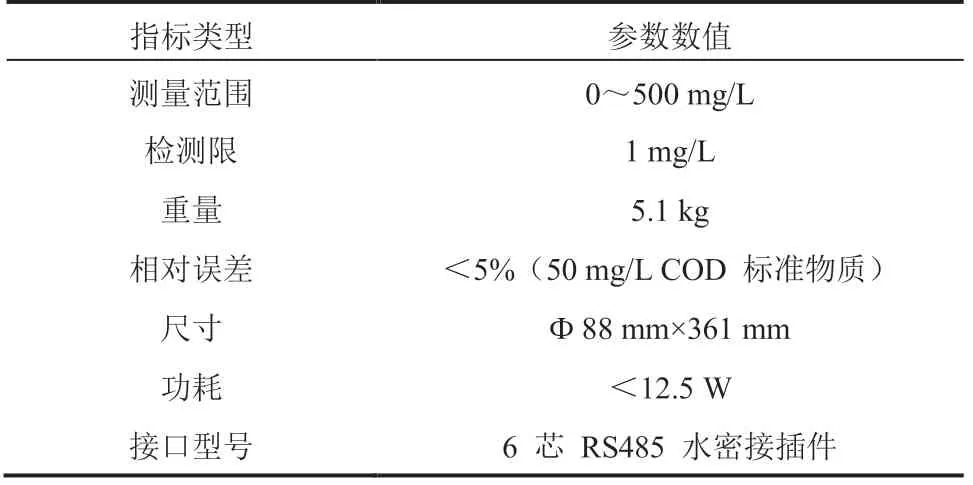
表2 海水 COD 原位传感器性能指标表Table 2 Specifications of the in-situ COD sensor
2.3 海水 BOD 原位传感器研制
2.3.1 海水 BOD 原位传感器检测原理
生化需氧量是指在一定条件下(20 ℃,避光)、一定时间内水中好氧微生物分解水中可生化降解有机物所进行的生物化学反应过程中所消耗的溶解氧的量(一般为 5 天,即 BOD5),以氧的质量浓度(mg/L)来表示[5]。它是间接反映水中有机污染物含量的一个综合指标,其值越高,表明水中有机物污染越严重,故而长期作为一项环境监测指标,目前在淡水中已经开展了大量研究并得到广泛应用。
以荧光分光光度技术为代表的光学传感技术在水质监测上的发展,人们发现自然水体中荧光激发发射谱各特征峰中(图 7),类色氨酸物质荧光峰(T2, 280 nm/360 nm)与 BOD5值具有最强线性相关性,这是由于该荧光峰与水体中的微生物群落的活跃程度有关,进而与水体中的氧气消耗速度关联,相关文献数据表明该相关性可达 0.8 以上[6]。因此,通过测量水体 T2 荧光峰强度可以间接测量 BOD5。
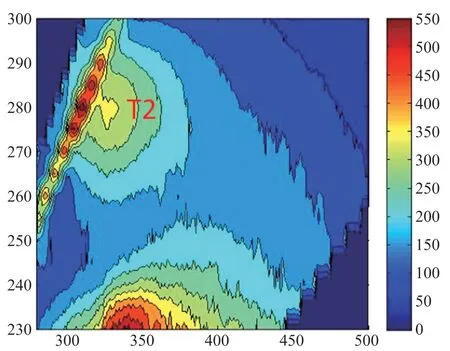
图7 深圳湾海水荧光激发-发射谱Fig.7 Fluorescence excitation-emission matrices (EEMs) for the seawater in Shenzhen Bay, China
2.3.2 海水 BOD 原位传感器设计与工程实现
通过对实际海水的三维荧光光谱(Excitation-Emission Matrix Fluorescence Spectroscopy)进行分析发现,实际海水中类色氨酸物质荧光峰(T2,280 nm/360 nm)信号相对其他峰要弱很多,而且峰的半高宽比较大。另一方面,太阳在长波紫外线(UVA)波段仍然具有较强的辐射强度。因此,如何抑制背景噪声影响,提取 T2 峰信号并进行准确探测,是传感器研制的关键。
如图 8 所示,光学方面,BOD 传感器的光源采用 LED 型紫外光源,以便于实现传感器小型化和低功耗;探测器选用灵敏度高、增益可调的光电倍增管,以满足弱信号探测需求;滤光片选用截止深度高的干涉型滤光片,尽可能消除光源和其他波段的荧光的噪声干扰。荧光光路采用垂直光路的方式。相比于垂直光路,落射式光路的激发光区域与探测光区域有着较大的重合率,容易实现更优的检测限,结构紧凑,传感器出光口为一个端面,便于安装遮光罩和清洁电刷。但在落射式光路中,激发光在光学窗口表面和其他反射面反射后容易进入到探测光路,且 LED 型光源出射光中的 360 nm 波段成分不可忽略,会混入探测信号而带来一定的噪声。另外,光学窗口、遮光罩上附着的微小生物幼体(电刷无法完全清除)含有大量有机物,部分成分能够产生强烈的荧光,会带来极大的信号干扰。综合考虑这些因素,本文采用垂直光路。另外,为了减少环境光的干扰,本文采用了遮光罩的设计,既有效避免太阳光散射的干扰,同时通过通水孔设计确保水体流通性。

图8 海水 BOD 荧光检测原理图Fig. 8 Schematic design of the fluorescence detection for seawater BOD
所设计的海水 BOD 原位传感器工程样机实物如图 9 所示,经过第三方出具的检测报告,传感器的参数如表 3 所示。整个传感器重量 1.5 kg,尺寸为 Φ69 mm×205 mm,功耗小于 5 W,采用 6 芯水密接插件。

图9 海水 BOD 传感器设计图(a)与实物图(b)Fig. 9 Design drawing (a) and physical image of the in-situ BOD sensor (b)
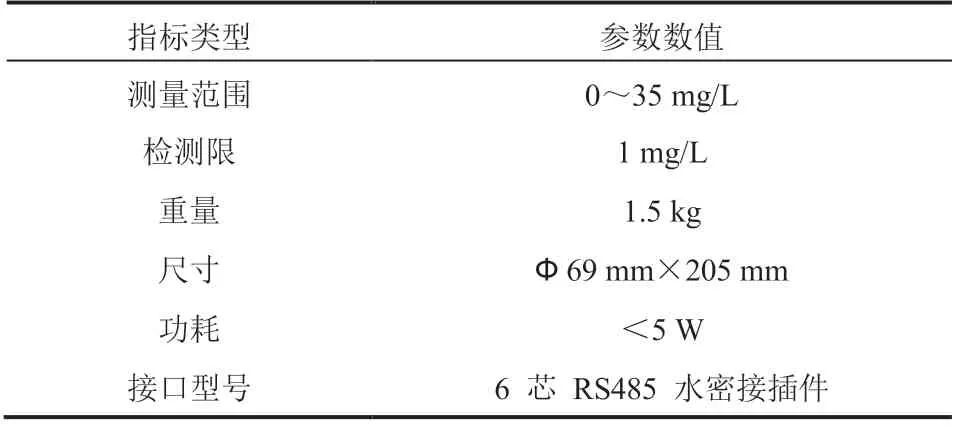
表3 海水 BOD 传感器指标表Table 3 Specification of the in-situ BOD sensor
综合对比国内外 BOD 原位、在线传感技术和相关产品,本论文的 BOD 传感器针对海水的长期、快速、原位监测需求进行了更为充分的设计,在防生物污损干扰、浮标平台集成和长期可靠性方面具有一定的优势。依托近海浮标平台进行海水 BOD 荧光传感器长期部署观测的尝试,据了解国内尚属第一次,对丰富环境监测浮标的监测参数,推动海水水质的综合评价具有重要意义。
2.4 浮游生物成像仪研制
2.4.1 浮游生物成像仪的观测原理
浮游生物成像仪通过与成像光轴垂直的照明光层进行照明,完全利用目标的侧向散射光进行成像,抑制水体的前向和背向散射光对成像的影响,从而提高成像的对比度和信噪比,原理如图 10 所示。通过照明光路的设计,压缩光层,并将光线限制在视场中,避免光线泄露至周围水体,减少趋光性对浮游生物观测的影响。通过采用白色的 LED 照明,实现浮游生物的彩色成像,还可以通过更换不同放大倍率的镜头来采集不同尺度的浮游生物图像。
采集的浮游生物图像经过预处理后得到单个目标的感兴趣区域(Region of Interest,ROI)图像,通过深度神经网络进行分类识别,并在长时间尺度上对丰度进行统计分析,从而实现对浮游生物进行长时间的水下观测。
2.4.2 浮游生物成像仪设计与工程实现
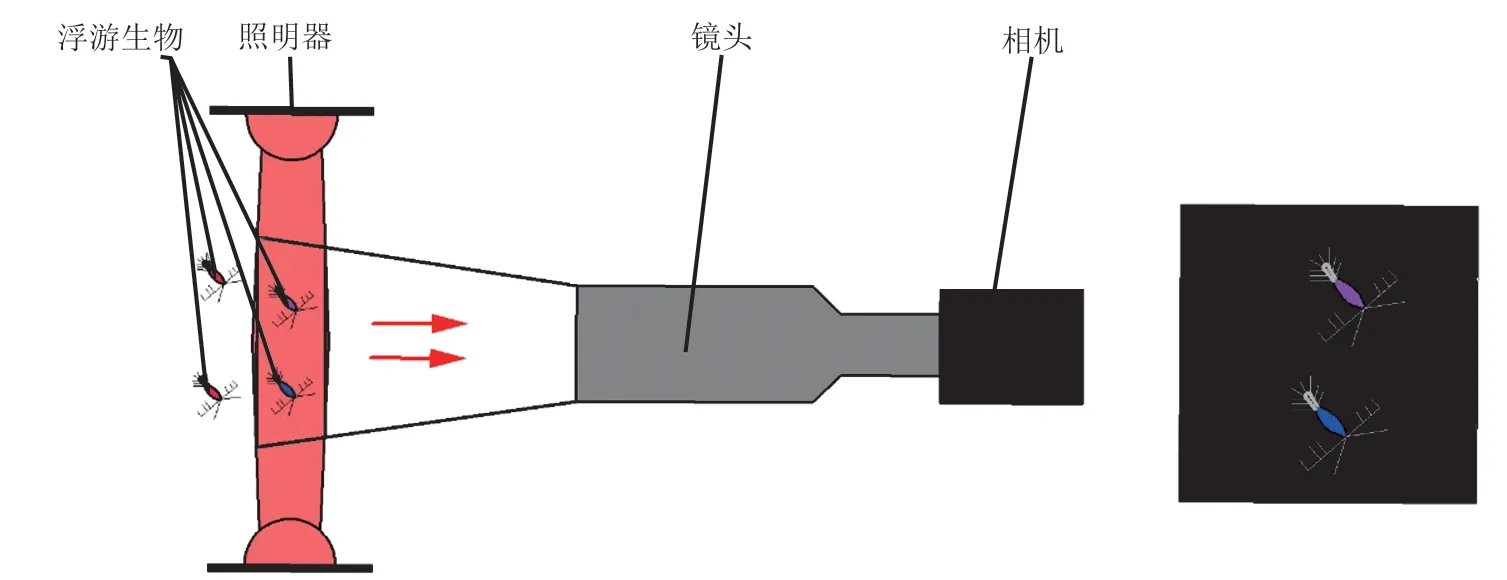
图10 浮游生物成像仪光学成像原理示意图Fig. 10 Optical imaging principle of the underwater plankton imager
光学方面,本文设计了 360°环形对中照明的照明器,使用 0.5× 的远心镜头配合彩色工业相机对目标进行成像,相机的图像分辨率为3 376×2 704 像素,像素尺寸为 3.69 μm。
仪器内部的工控机可以实现图像的采集和预处理,包括减背景、目标检测与 ROI 分割、聚焦评价和白平衡,然后存储在硬盘中,等待图像自动传输程序将图像上传至服务器。
为了实现浮游生物成像仪的水下原位工作,所有光学和电子部件都被固定在一个带有透明窗口的密闭舱体中,光学信号通过透明的光学窗口进入容器,电学信号则通过水密电缆进行传输。浮游生物成像仪的工程样机如图 11 所示。经过上述光学、机械结构、电路设计、图像预处理和防生物附着的设计后,浮游生物成像仪的性能指标如表 4 所示。

图11 浮游生物成像仪设计图(a)与实物图(b)Fig. 11 Design drawing (a) and the in-situ plankton image photo (b)
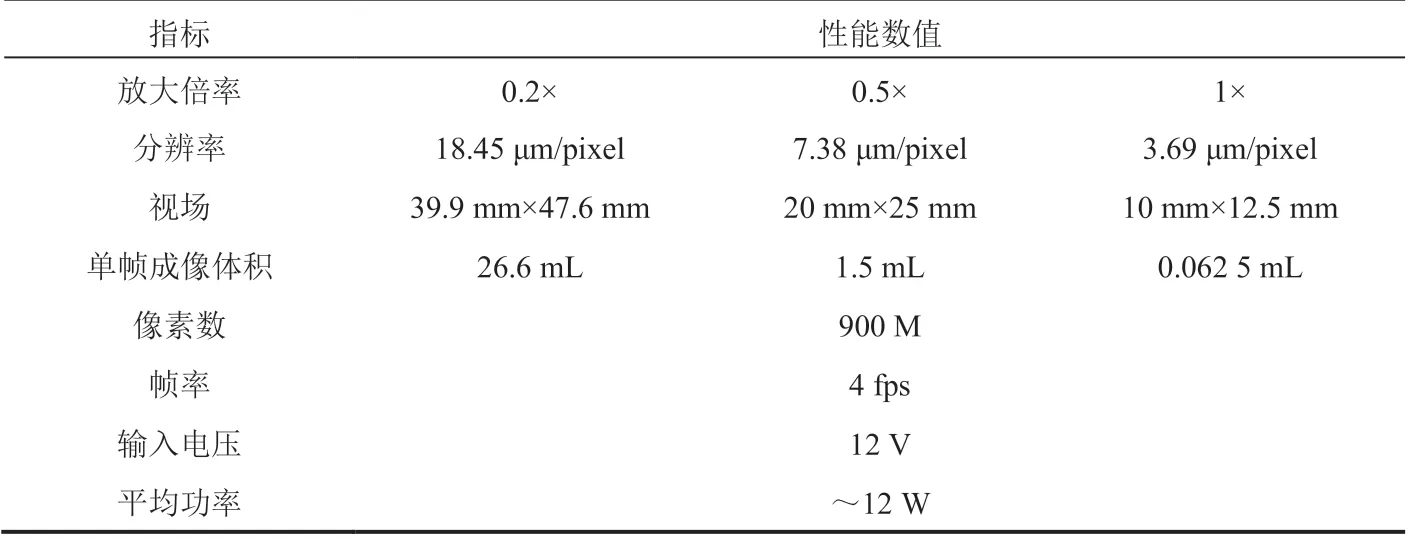
表4 浮游生物成像仪性能指标表Table 4 Specifications of the plankton imager
本文对所设计的浮游生物成像仪的成像能力和识别性能进行了第三方检测,为后续成像仪的长期浮标海试做准备。利用符合 USAF1951 标准的特制分辨率靶标和 5 μm 的悬浮微球对成像仪的成像性能进行检测,检测结果符合设计要求。通过浮游生物专家随机选择 100 张数据库外的图片,并将专家的鉴定结果与算法识别结果进行比对,以对成像仪的识别性能进行检测。检测得到识别算法的准确率为 86%,同样满足设计要求。
3 基于浮标平台的系统集成与近岸海试研究
3.1 传感器与浮标的系统集成
四个传感器设计、加工与装配完成后,为了开展原位实验和验证,采用深圳市朗诚科技股份有限公司定制研发的 3 m 浮标平台进行集成,如图 12 所示。4 个传感器分别由 3 个仪器架固定,分布在浮标平台周边的 3 个仪器阱中。浮标布放后,4 个传感器可以完全浸入海水中对各参数进行原位测量。
叶绿素 a、COD、BOD 三个传感器均采用 6 芯水密接插件与浮标平台连接。其中两芯为供电接口,直接由浮标平台蓄电池供电,供电电压为 9~18 V,另外 4 芯为 RS485 通信接口,连接浮标平台的数据采集器。三套设备采用 3 个不同的设备地址,并采用行业通用的 MODBUS 通信协议与浮标平台通信。浮游生物成像仪与浮标通过 13 芯的水密电缆进行连接,供电电压也是 9~18 V,其余 11 芯用于通信和数据传输,连接到浮标平台的 4G DTU 模块。4 个传感器的数据,都可以通过无线网络传回云端的服务器,供用户实时查阅。整个传感器的电路连接图,如图 13 所示。
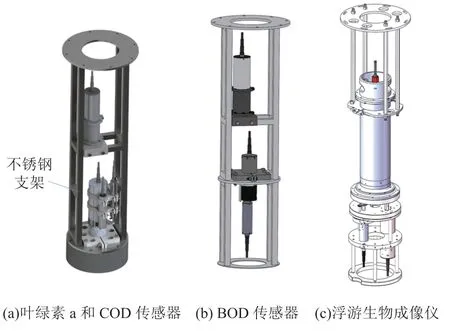
图12 传感器与浮标平台集成框架示意图Fig. 12 Schematic diagram of sensor and buoy platform integration
3.2 近岸海试研究
3.2.1 验证性海试
为了测试浮标和传感器的各项功能,2019 年 11 月 12 日至 12 月 11 日,本文作者团队在广东省深圳市大亚湾海域进行了浮标集成与浅海试验(见图 14),浮标所处地理位置为(22°120′,114°31.077′)。
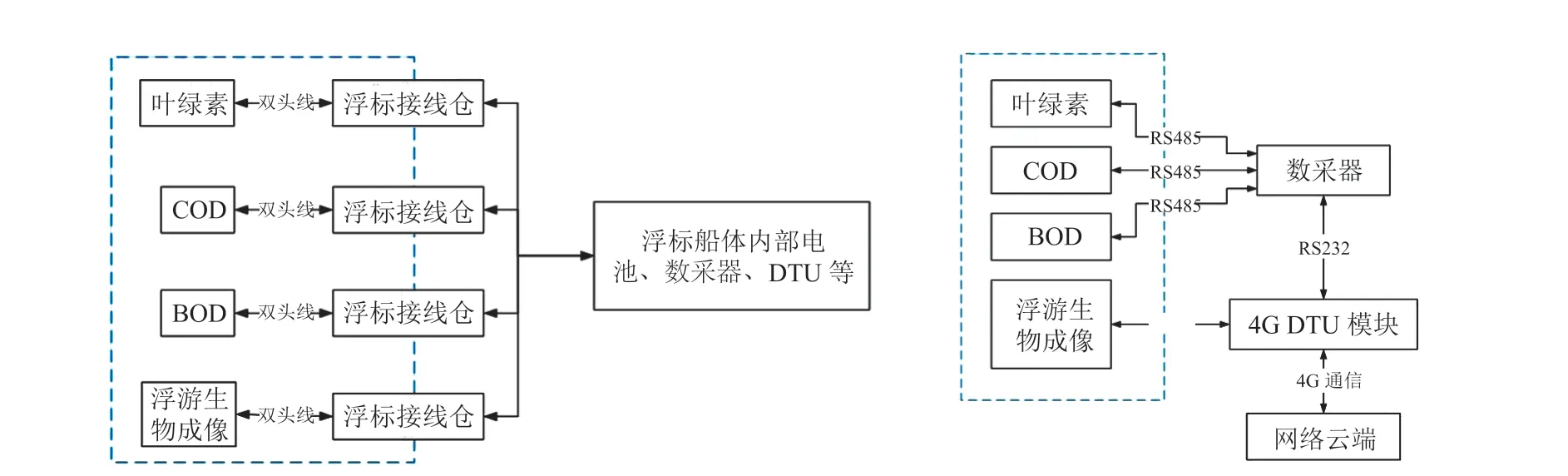
图13 传感器与浮标平台电气连接示意图Fig. 13 Schematic diagram of electrical connection between sensors and buoy platform

图14 海试地点(a)与浮标实物图(b)Fig. 14 Location of the sea trial (a) and physical image of the buoy platform (b)
在为期 1 个月的海试中,各传感器均遭受了严重的生物附着,如图 15 所示。其中,传感器、支架,特别是光学窗口上,附着了各种海洋生物。通过显微镜分析,附着生物包括藤壶和端足类。由于附着严重,用于清洁窗口的机械毛刷也出现卡住、停止工作等问题,直接导致 4 个光学传感器无法正常采集数据,但仪器的供电、通讯保持正常,初步验证了传感器水下工作特性。
3.2.2 防生物附着措施与示范性海试
为了保证传感器在海洋原位环境下的长期稳定工作,团队经过大量的实验研究,针对性地设计了两种防生物附着策略。
在材料方面,结合长期挂板实验的结果,选用环境友好的生物附着材料对传感器的外壳、夹具进行了喷涂[26];在机械结构方面,重新设计并改进了水下机械刷,对机械刷的材质、阻尼和工作频率等进行了针对性的研究。重新设计后的传感器在 2020 年 6 月 23 日投放到浮标平台进行海试,连续运行 30 天后,传感器与验证性海试的对比结果如图 16 所示。从图 16 可看出,新设计的传感器生物附着程度有着明显地减轻,几乎看不到任何生物附着的痕迹。调整后的机械刷也能够连续正常工作,并且不会刮伤传感器的光学窗口,使传感器具备了水下长期原位观测的能力。

图15 生物附着实物图Fig. 15 Photos of the biological fouling

图16 防生物附着效果图Fig. 16 Anti-fouling eあect of the sensors after long time sea trial
从 2020 年 6 月 23 日开始,基于浮标集成的海洋叶绿素 a、COD、BOD 原位传感器已在深圳市大亚湾海域连续工作 6 个月以上,并在 2020 年 10 月 29 日至 11 月 29 日期间,开展了 1 个月的示范性海试。在海试过程中,获得了大量原位监测数据,建立了浮游生物数据库,并积累了丰富的传感器维护、传感器现场校正经验,为传感器未来实际使用,奠定了良好的基础。
4 海试结果分析与讨论
基于浮标平台搭载海水 COD 和 BOD 在线监测传感器以及水下浮游生物成像仪,是新型的海洋生化要素原位监测手段。深圳现有的生态浮标主要监测海水的浊度、温度和盐度等物理参数[27],对于 COD、BOD 的原位监测,几乎未见报道,而基于浮标平台的原位浮游生物成像,尚未见报道。本论文创新地基于浮标平台集成自研的叶绿素 a、COD、BOD 原位传感器和水下浮游生物成像仪并进行长期海洋原位观测。
如图 17 所示,叶绿素 a 传感器共获得约 12 万个数据,测量值主要在 2~5 μg/L,平均值为 3.41 μg/L,而随着每天太阳光照的昼夜周期变化,叶绿素 a 测量数据也发生类周期性变化;COD 传感器共获得海水原位吸收光谱 1 536 组,测量值主要在 2~6 mg/L。由于探测海区海水较浅,海水的浊度变化较大,水中颗粒物散射导致部分测量值偏高;BOD 传感器共获得约 5 万个数据,数据相对平稳,多数测量值在 0~2 mg/L,表明有机物污染程度相对较轻。同时,还发现小部分数据异常偏高,根据现场分析,推测漂浮颗粒物和浮游生物的干扰可能性最大。另外,BOD 传感器“采样-读数”周期不到 10 s,大大低于现有微生物电极法海水 BOD 在线传感技术(33 min)的周期[28]。以上测试结果表明,3 个传感器可以在海洋原位情况下长期连续工作。

图17 叶绿素 a、COD 和 BOD 传感器连续 32 天的海试数据Fig. 17 Sea trial results of the Chlorophyll a, COD and BOD sensors
浮游生物成像仪共采集了约 140 万张浮游生物和颗粒物图像,其中颗粒物图像占到了 90%以上,大量的颗粒物图像给我们建库带来了巨大的挑战。海试期间采集的一部分浮游生物图像如图 18 所示。成像仪完全利用目标的侧向散射光进行成像,相比于 CPICS 和 SPC 利用“前向散射光+透射光”的成像方法而言,景深外的颗粒物散射对成像的影响更小,而且侧向散射光携带了更多的高频信息,对于绝大多数的浮游生物而言,能够得到更高对比度的图像和目标物更丰富的色彩及纹理细节信息,如图 18 所示。其中,更高对比度的图像使我们利用简单的固定阈值方法即可完成目标检测与 ROI 提取,大大降低了目标检测的难度和计算复杂度;丰富的色彩和纹理细节信息能为浮游生物分类专家在鉴定时提供更多的参考信息,提升建库时的准确率,进而实现高准确和高精度的识别和分类。此外,成像仪还能较好地将照明光线束缚在视场区域内,这相比于 CPICS 和 SPC 采用的照明技术而言,极大地减小了因光线泄露造成周围水体中浮游生物的非自然分布对丰度统计正确率的影响,进一步提升观测的准确率。
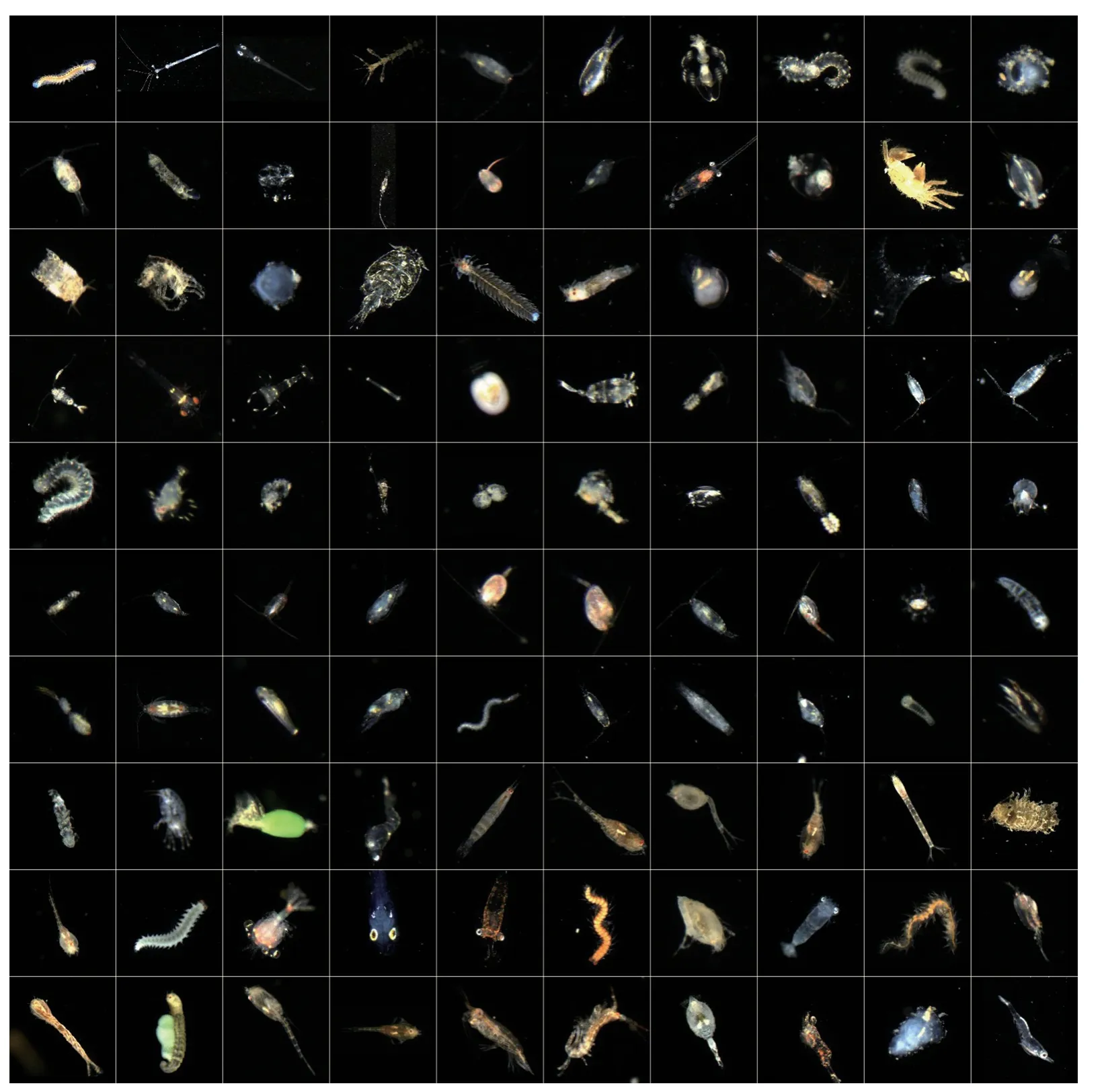
图18 海试期间采集的一部分浮游生物图像Fig. 18 Selected marine plankton images captured by underwater imager
值得一提的是,在 2020 年 6 月底至 7 月初,浮游生物成像仪拍摄到了大量的尖笔帽螺的图像(见图 19),而在 7 月 3 日后,逐渐消失。这一监测结果与黄洪辉等[29]通过人工采样对该次尖笔帽螺暴发事件进行研究的报道接近,证明了浮游生物成像仪在有害生物暴发监测方面的潜力。
5 结 论
本文针对海洋生物化学常规要素原位在线监测的应用需求,开展基于光学传感的海水叶绿素 a、COD、BOD 和浮游生物成像仪研制,所研制的传感器在检测范围、检测限等指标上,与国际上先进的同类产品相当。基于浮标平台,解决了传感器在原位测量过程中遇到的生物附着等工程问题,完成了 4 个传感器的原位测量实验和验证。在广东深圳市大亚湾海域开展了连续 6 个月以上的海试研究,获取了大量的原位监测数据,实验结果准确反映了海水的真实状态。这些传感器的研制和海试研究,对提升海洋环境监测技术水平,支撑海洋环境安全保障体系的建设,具有重要的促进作用。此外,本研究结果为上述仪器的国产化奠定了基础,有望为我国海洋业务化管理部门和科研单位等用户提供新型的海水水质监测技术手段和国产化仪器。
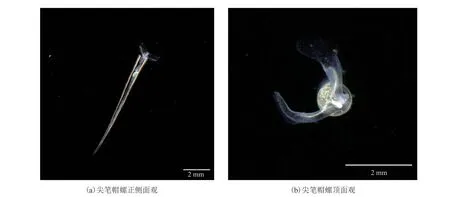
图19 尖笔帽螺原位图像Fig. 19 Creseis acicula in-situ images