一种测定并置站垂线偏差的小网参数转换法∗
2021-03-29马小辉张志斌孙中苗米立功张阿丽王广利谷守周0
马小辉 张志斌 孙中苗 米立功 雷 鸣 张阿丽王广利 王 宏 谷守周0
(1 信息工程大学地理空间信息学院郑州450001)(2 西安测绘研究所西安710054)(3 地理信息工程国家重点实验室西安710054)(4 中国科学院上海天文台上海200030)(5 中国科学院大学天文与空间科学学院北京100049)(6 黔南民族师范学院物理与电子科学学院都匀558000)(7 西安航光仪器厂西安710119)(8 中国科学院新疆天文台乌鲁木齐830011)(9 北京跟踪与通信技术研究所北京100094)(10 中国测绘科学研究院北京100039)
1 引言
垂线偏差(Deflection of the Vertical, DOV)定义为地面一点上的重力矢量和相应椭球面上的法线矢量之间的夹角. DOV是连接天文、大地以及重力3大基准之间的重要参数, 在不同重力基准转换方面也不可忽视[1]. 其具体应用[2]包括: 天文与大地成果(坐标、方位角)间的转换、观测水平角垂直角到椭球的归算、大地网平差、大地水准面检核、不同高程系统间的转换等. 更为可贵的是DOV在航天[3–5]以及地球物理研究, 包括地下物质迁移、地震信号分析等[6–12]方面也具有重要意义. 国际天文联合会[13]与国际大地测量协会[14]等组织均十分重视对DOV的研究.
DOV的测定方法包括传统天文大地测量法、全球卫星导航定位系统(Global Navigation Satellite System, GNSS)水准法、重力测量法和地球重力场模型法. 天文大地测量法观测设备近年已由天顶筒升级为数字天顶仪[15–16], 其内符合观测精度∼0.2′′, 轴线绝对定位精度为1′′–2′′. GNSS水准法[17]在采用相对精度为厘米级的大地水准面的情况下, 可获得∼0.7′′计算精度的DOV[18], 适用于面积不大且地形呈线性变化的地区. 采用重力测量法[19]和地球重力场模型法[20], 例如我国2000中国重力场与似大地水准面模型(CGGM2000), 确定任一点DOV的精度可达1.5′′.
甚长基线干涉测量(Very Long Baseline Interferometry, VLBI)天线[21–22]需在建站初期开展本地测量来测定其参考点坐标初值, 在测站运行后, 会对多技术并置站(如VLBI和GNSS并置)不定期开展本地连接测量. VLBI全球观测系统(VLBI Global Observing System, VGOS)对本地连接测量频次的要求是2.5 yr一次, 以此来测定VLBI天线参考点与其他空间大地测量设备参考点之间的连接矢量, 从而对多技术地球参考架提供约束. 本地连接测量的基本流程包括: 本地控制网布设、与天线随动的靶标散点坐标观测以及站址坐标归心解算. 本地控制网一般基于GNSS技术布设, 通过开展GNSS同步环观测, 各控制基墩坐标可以达到亚毫米的观测精度. 为了获得更高精度的VLBI测站参考点坐标, 还会在本地控制网上开展高精度水准测量.
中国科学院新疆天文台南山站是国际上为数不多的多技术并置站, 在维持全球测地基准, 特别是中亚测地基准方面有着重要贡献. 其本地控制网覆盖范围在方圆200 m内,因此本文针对此类小范围控制网(简称小网), 考虑是否可以通过假设测站DOV值在一定程度上一致, 从而可利用GNSS、本地平面及高程控制网数据解算出VLBI测站的DOV值. 另一方面, 位于中亚的天山是目前全球最为年轻和活跃的山脉, 南山站地处天山北麓, DOV子午分量值应要远大于一般平原地区DOV值, 这使得南山站成为检验本文提出的DOV测定新方法的理想试验场.
本文推导了采用传统GNSS方法测定DOV的形式误差的评估模型, 给出了利用小网求取DOV的新方法, 并利用DOV实测数据评估了该方法的有效性, 就其细节展开了分析与讨论.
2 原理
2.1 利用GNSS测定垂线偏差
利用GNSS测定DOV的经典方法可参考文献[23–24]. 当任一基线两端距离较近且DOV变化可视为线性变化时, 基线中点位置处的平均垂线偏差δ在基线方向上的分量为:

其中,hv和hn分别为基线两端的正高之差和大地高之差,D为基线长度. 则有:

式中ξ和η分别为DOV的北向和东向分量,A为基线方位角. 如图1所示,PA、PB和PC分别为3个GNSS控制点,A1和A2分别为基线PAPB和PAPC的方位角. 当两条GNSS基线的位置相互靠近时, 有:

式中,δ1和δ2分别为基线中点位置处的平均垂线偏差值在各自基线方向上的分量. 解方程组可得:

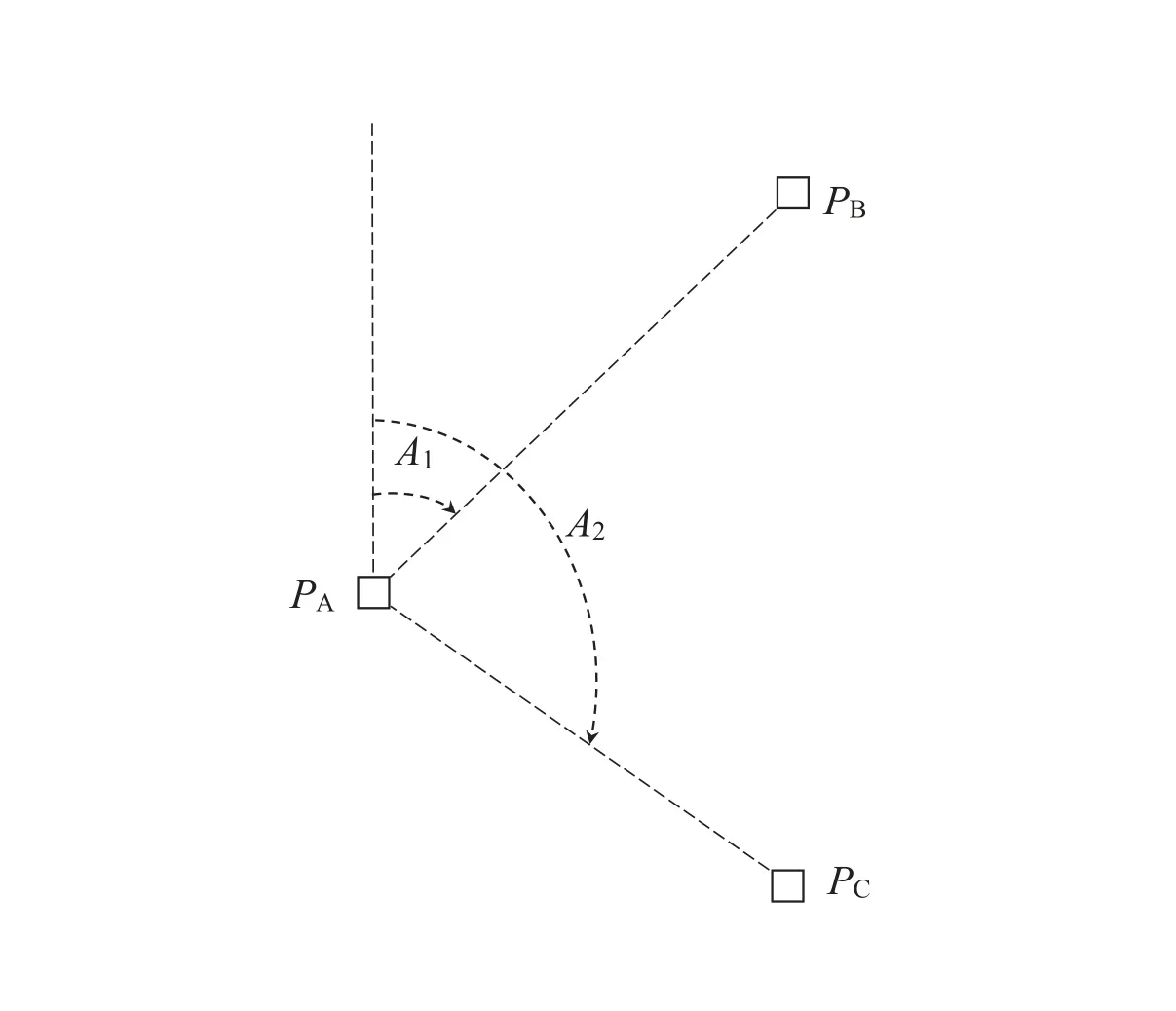
图1 利用GNSS测定垂线偏差Fig.1 Determining DOV using GNSS
不难看出, 上述方程成立的前提是基线两端的DOV呈线性变化, 且两条基线中点处的DOV值相同, 这决定了该方法适用于小网.
(4)式的误差传递公式推导过程如下, 首先求取δ的全微分形式:

右边第3项为小项, 忽略该项后, 可得δ的方差为:


其中x、y分别为GNSS基线的地平西东分量和南北分量, 对应的方差分别为和
将上式两端取对数后作全微分, 可得:

其中, ∆x和∆y分别是地平坐标系中东方向和北方向上的增量. 依据误差传播定律, 可得方位角A的方差为:

为推得(4)式的误差, 首先对其进行线性化得:

其中, ∆δ1和∆δ2分别为第1和第2条基线上的平均DOV值增量; ∆A1和∆A2分别为第1和第2条基线方位角上的增量.
最后利用经典GNSS方法求取DOV分量ξ和η的方差分别表示为:

(11)式中的mδ1、mδ2、mA1和mA2可由(6)式和(9)式算出.
2.2 小网转换法测定垂线偏差
本节所用旋转矩阵共有两种, 第1种用以描述质点在同一坐标系中绕原点的旋转,用R1/2/3表示, 下标分别表示绕第1、2、3轴的旋转; 第2种用以描述新坐标系相对旧坐标系的旋转, 用R1/2/3表示, 下标意义同上. 在笛卡尔坐标系中, 坐标系旋转的实质是轴系相对某一角度旋转, 角度正方向符合右手准则, 反之为负.
假设小网范围内的垂线偏差数值在一定精度范围内相同, 如本文研究对象南山VLBI并置站本地控制网中最长基线为164 m, 在控制网区域范围内, 可以认为垂线偏差值相等. 通过开展本地GNSS控制网的同步环观测以及自由网平差, 可以确定小网各基墩在地心系(如国际地球参考框架)中的坐标. 固定其中一个基墩坐标, 求取测网中其他基墩相对该固定基墩的坐标差, 得到测网相对某一固定点的矢量PXY Z,X、Y、Z分别表示地心系的3个坐标分量. 地心系原点在大地体的质量中心,X轴与首子午面与赤道面的交线重合(向东为正),Z轴与地球旋转轴重合(向北为正),Y轴与XZ平面垂直构成右手系. 利用该固定点的实测大地经度(L)和大地纬度(B), 可将这些矢量从地心系转换到法线地平系ENUn下的矢量PENUn. 法线地平系定义为: 坐标原点为测站点,N轴为过测站的子午线切线(向北为正);Un轴重合于测站点上的法线(向上为正),E轴垂直于N轴和Un轴所确定的平面, 与纬线相切(东向为正). 具体转换公式为:

另一方面, 由于本地局部控制网是基于本地水准开展, 同时天线归心测量参数解算中可以求出起始俯仰角OA, 因此可基于本地局部控制网原点, 将本地局部控制网下的矢量Ploc转换到垂线地平系ENUv下的矢量PENUv. 垂线地平系定义为: 坐标原点为测站点,N轴为过测站的子午线切线(向北为正);Uv轴重合于测站点上的垂线(向上为正),E轴垂直于N轴和Uv轴所确定的平面, 与纬线相切(东向为正). 具体转换公式为:

式中OA为局部控制坐标系第1轴到东方向间的夹角, 顺时针旋转为负角, 故在(13)式中加了负号.OA的值可通过本地控制网的定向来给出, 也可以通过归心测量来估算[25]. 下文中将采用小网转换求取OA的改正量δA, 故其初值的选取并不会影响最终DOV解算结果.
至此我们得到了本地控制网基墩的两组地平坐标序列, 分别基于法线地平系和垂线地平系. 在此利用包含DOV的旋转矩阵构建两者间的联系如下:

(14)式中的δA为OA的改正量, 用来表示两个坐标系间的北方向定向差; 右侧矩阵是基于小角近似以及高次省略后的结果. 结合前面的公式, 可对两组序列开展旋转参数求解,包括法线地平系和垂线地平线间变换的3个平移参数(Tx、Ty、Tz)以及3个欧拉角(ξ、η和δA), 与(2)式中DOV的定义不同, (14)式中的ξ和η的正方向分别为南向和东向, 则参数方程的具体形式如下:

其中(x0y0z0)T和(x1y1z1)T分别为小网中控制点在法线地平系和垂线地平系中的坐标. 通过最小二乘法, 由上式便可求解出各转换参数. 需要注意的是, 上式同样可以加入尺度因子项构成常用的7参数坐标转换, 但由于本例中的控制网尺度较小, 基线测量误差和基线长度比值较大, 所解算的尺度因子在百万分之一的量级, 并不能反映真实尺度(十亿分之一量级)变化, 且会降低误差方程的解算自由度, 因此本文采用了6参数转换方法求取DOV.
3 试验与结果
3.1 试验过程
2011年7 月, 对乌鲁木齐南山站25-m VLBI天线开展了本地连接测量, 求取VLBI天线参考点与GNSS基准站站点GUAO (GPS Station of the Urumqi Astronomical Observatory)间的本地连接矢量. 控制网的GNSS坐标由超过1周的同步环观测数据解算得到, 本地控制网由图2中P1–P5及GUAO组成, P1–P5为2011年开展本地连接测量中布设的5个控制点. 利用GNSS和本地三角高程方法测量得到控制网基墩的精度信息, 分别如表1和表2所示, 表1和表2中mX、mY、mZ和mx1、my1、mz1分别为各坐标分量的误差.控制网中测定精度最高的3个点为P1、P2和P4点, P3点次之, P5点相对最差. 本地控制网观测、归心测量过程及参数解算细节可参考文献[26–28].
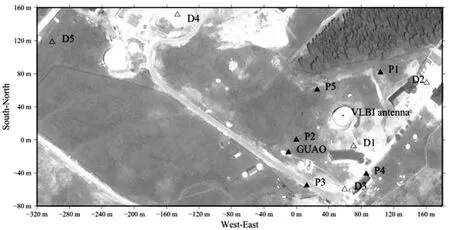
图2 南山并置站本地连接控制网(▲)与垂线偏差观测点(△)Fig.2 Local control network (▲) and DOV surveying points (△) in NANSHAN co-located station
2020年5 月, 组织专业测量人员采用AT330型数字天顶摄影定位系统(天顶筒), 对南山站开展了DOV测量. 依据GJB 149 A-2013《军用天文测量规范》关于不同等级天文测量的精度要求, 采用数字天顶摄影定位系统对南山站开展了天文定位. 由于观测期间乌鲁木齐南山站气象条件与地面硬化范围有限, 共选取了5个DOV观测点, 观测点位置如图2中D1–D5所示, 具体测定结果见表3. 结合夜间气象条件, 对仪器校正以及作业模式做了灵活配置, 对D1点, 开展了“1+4”观测, 其中“1”表示先开展1次倾角仪状态参数测量,“4”表示开展4次测站天顶恒星影像拍摄及仪器倾斜信息采集, 从而实现4次测站站点定位; 其中D3点, 因观测时段限制, 作了“1+1”观测; 其余的观测点均为“1+3”的观测模式. 天顶筒的实测结果用来对本文方法所得结果作验证.

表1 GNSS所测控制网地心坐标以及误差(单位: m)Table 1 The geocentric coordinates of the control network surveyed by GNSS and their errors (unit: m)

表2 利用本地三角高程和精密水准所测控制网中点位坐标及误差(单位: m)Table 2 The coordinates and their errors in local control network surveyed using local trigonometric leveling and precise leveling (unit: m)

表3 5个点位DOV天顶筒实测值Table 3 The DOV values of the 5 points surveyed using photographic zenith tube
3.2 试验结果
如上所述, 本地控制网测量与DOV测量分别开展于2011年和2020年. 对于一般活跃震区而言, 例如京滇地区重复测量结果表明, 垂线偏差每年有0.001′′–0.004′′的偏移[29],具体因地而异. 考虑到南山站DOV值的10 yr变化量不超过0.04′′, 则该变化仍在D1点的DOV实测精度范围内.
利用经典GNSS方法所测定的DOV分量值如图3所示. 图中横线为本地GNSS控制网内部D1点的DOV分量实测值, 误差棒表示各网形解算DOV分量值的1σ形式误差,ξ和η定义的正方向分别为北向和东向. 因P2点最为接近VLBI天线, 因此本文所选小网均包含P2点. 结果表明, 对于3站网形所给出的DOV,仅有P1、P2、P4(图中为P1P2P4,其余组合表达方式类同)所组成网形的解算结果与实测值符合, P2P3P4与实测值接近,但其精度较差. 其余网形所测DOV在不同分量的数值和方向上均与真值有出入.

图3 GNSS方法所测3站网形的DOV (左列)及其偏差(右列)Fig.3 The DOV (left column) and its bias (right column) of the 3-point networks surveyed by GNSS
图4为利用小网参数转换方法所测DOV结果, 图中横线为D1点的DOV分量实测值,误差棒与各参数的定义同图3. 与经典GNSS的DOV测定方法相比较, 结论如下:
(1)通过开展小网转换的方法可以解算得到DOV各分量值, 该方法物理意义明确, 步骤简单;
(2)不同小网所解算的DOV分量结果均有差异, 个别网形不符合度达到100′′–200′′,已远大于小网间本身的DOV差异;
(3)两个可信的解算网形为P1P2P4和P1P2P3P4. 与P5有关的网形所解算结果与实测值的吻合度最差, 与P3有关的网形所解算DOV结果精度稍优于与P5有关的网形所解结果;

图4 采用小网转换法所测定的DOV (左列)及其偏差(右列)Fig.4 The DOV (left column) and its bias (right column) by the small scale control network parameters transformation method
(4)网形P1P2P4所解算的DOV精度最高, 分量值分别为30.5′′±4.3′′和−11.1′′±4.7′′,与DOV实测分量值符合度分别为−2.3′′和0.2′′, 均在各自1σ形式精度内;
(5)尽管在平差过程中做了加权考虑, 但网形P1P2P4所解得DOV精度及符合度要优于网形P1P2P3P4所解结果, 即高精度的DOV测量值由最高观测精度的测站(3站)决定;
(6)尽管大部分4站和5站组成网形的解算DOV与实测值符合度较差, 但在其所解DOV分量方向上的表现是一致的;
(7)绝大多数3站网形所测DOV分量均与真值不符, 这一表现与经典GNSS方法所测DOV表现相同, 说明两种方法是等效的. 而小网转换求取DOV仅需一步转换参数的求解, 无需计算方位角和平均垂线偏差等参数, 相较而言平差过程也更简单且DOV分量精度较高, 便于开展大范围的测网分区求解.
3.3 网形覆盖度与解算形式误差的关系
如图5(上图)所示, 对于包含3点的小网,如P1P2P5、P2P3P4、P2P3P5不仅覆盖面积小, 且网形为钝角三角形, 这也是其所解DOV与实测值偏差较大的原因之一.

图5 小网面积(上图)、3点小网与其DOV形式误差间的关系(下图).Fig.5 The area of the small scale control networks (top panel), the relationship between 3-point network and its formal error of DOV (bottom panel).
图5 (下)中给出了3点小网面积与其形式误差之间的关系(图中小圆圈表示DOV形式误差的坐标, 用与其相连的竖线引出表示了该形式误差对应的网形). 可以看出, 网形覆盖越差(包含钝角的三角形网形、较小的覆盖面积), 所得网点的精度越差. 反之, 子网面积越大, 网形越好(近似等边三角形), 对应解算的DOV精度及可靠性越高, 但若加入个别精度较差的点(P5或P3), 尽管已采用了加权方法来控制其影响, 这些点仍可能会导致解算的DOV与测定值间有较大偏差.
4 讨论与结论
从表3来看, 南山站的DOV值确实大于其他地区, 其他地区一般平原为几个角秒, 山区值虽较大但也仅∼20′′, 而南山站仅DOV子午分量就达到了33′′. 南山站建设工程分1、2两期, 即分别对应西和东两个地块. 如图2所示, D1、D2、D3点位于1期, D4、D5点位于2期, D1、D2、D3点DOV子午和卯酉分量的一致性分别为0.224′′±0.06′′和0.039′′±0.053′′; D4、D5点DOV子 午 和 卯酉分量的一致性分别 为0.340′′±0.082′′和0.054′′±0.078′′. 两个地块之间DOV分量的最大差值为1.039′′±0.087′′和0.518′′±0.068′′. 整体来看, 对于南山站在方圆200 m和500 m范围内, DOV分量的一致性分别为0.4′′和1′′. 因此, 从本例来看, 在1′′测定精度条件下, 可以假设方圆500 m范围内的DOV值一致, 可以考虑在此范围内布设覆盖面积大, 网形结构较好的3点, 开展1′′精度GNSS同步环测量来确定测区内的DOV值. 如面积再扩大, 小网中DOV值的一致度将超过1′′, 这样DOV必须分网解算. 这是小网覆盖面积与其所测DOV代表性之间的折衷.
本文结论也表明3站组网对提高观测效率有重要意义, 多站组网观测并不一定能提高DOV测定精度, 这与网点测定精度以及网形分布密切相关. 对于用来监测并置站连接矢量的小控制网, 特别是由多个连续观测参考站所组成的并置站, 这些站点会开展GNSS控制网的定期或连续监测, 结合本地高程和平面的控制测量, 使得这类测量不仅可用来确定本地连接矢量, 还可以用来实现零成本的DOV长期监测, 对完善多技术并置站功能有着重要的实用价值.
致谢感谢曾安敏、李进、黄乘利等老师对本文提供的有益指导. 特别感谢中国科学院新疆天文台、西安航光仪器厂在实施垂线偏差外业测量与保障中的付出.
