基于AI的智慧机场自助通行防尾随应用
2021-03-25詹红梅
詹红梅
(厦门瑞为信息技术有限公司,福建 厦门 361000)
0 引言
在2008年的全国民航工作会议上,中国民用航空局党组提出了全面推进建设民航强国的战略构想,建设强大的民航不是一句空洞的口号,而是一个实实在在的落地工程,具有创新的技术突破和应用。基于AI技术自助通行防尾随,解决当前旅客及行李无法精准识别,旅客并行及抱行通行无法识别、小孩匍匐爬行无法识别等问题,并将技术转化为产品化落地应用。
1 防尾随技术应用概述
1.1 机场防尾随的应用需求
民航局《中国民航推进四型机场行动纲要》(2020-2035年)要求在2035年实现标杆机场引领世界发展,2021年到2030年是四型机场建设的全面推进阶段[1]。旅客全流程自助通行是“平安、绿色、智慧、人文”机场的重要内容,可以有效提升旅客的服务体验感。当前北、上、广、深等一线城市及其他千万级机场已逐步在预安检、安检、登机等场景应用自助通行系统,其中因人员尾随问题出现众多旅客漏检、误检导致设备无法正常运行,旅客全流程自助通行服务无法快速全面推广,智慧机场建设发展速度放缓,机场自助通行系统急需更有成效的防尾随技术支持。
1.2 自助通行防尾随技术分析
目前机场自助通行系统应用的主要的防尾随技术主要如下:
(1)红外对射式光电传感器防尾随技术:通过对射式光电传感器可精确检测闸机通道中通过的物体,并传送信号给控制器,控制扇门的开闭。通过对射式光电传感器来实现人物的进出感应,防尾随方法策略单一,无法准确识别各种过闸情况,对于拖行李箱等情况不友好,容易造成误夹的情况,存在安全隐患[2]。
(2)红外成像防尾随技术:红外传感器提供的红外成像分析通道内的人体数量,成像判断进入通道内的热源体是否为并排行走的人体或前后同步行走的人体,从而判断是否存在尾随行为。该种技术对于尾随响应较慢,只能监控闸机门前的一小块区域,监测范围小,缺乏灵活性[3]。
(3)视频防尾随技术:视频防尾随是一种常用的防尾随技术,视频防尾随是在通道内放置摄像头,采用视频图像分析技术识别判断通道中是否有两个人及以上,对于超过一个人进入通道内的,按照用户方约定的协议提供报警信息给后台以实现防尾随控制处置。视频防尾随技术相较于前两种技术应用成本较高,防尾随效果取决于监控范围及视频图像分析技术和算法的优劣[4]。
1.3 当前防尾随存在的问题
目前在机场自助通行场景中,红外对射和红外成像防尾随技术均有应用,视频防尾随技术作为辅助方式配合使用,但因为技术本身的缺陷在旅客自助通行时仍无法识别以下场景:旅客及行李无法精准识别,旅客并行及抱行通行无法识别、小孩匍匐爬行无法识别。机场自助通行通道依托软硬件高度集中化的闸机,需要系统间逻辑互通、信息互通、软硬件高效协同,由于闸机系统内通行逻辑不开放,视频防尾随技术无法与闸机开关门联动、防尾随报警存在漏洞[5]。
基于防尾随技术的实现方式,当前机场自助通行防尾随应用主流的研究方向一是防尾随技术结合现场通行场景,对防尾随监控区域(光电传感、红外传感、视频监控区域)、通行逻辑上优化升级提升防尾随效果;二是算法优化升级,通过更加精准的算法提升防尾随效果。
2 AI防尾随应用
机场自助通行防尾随应用最关键的两个方面是防尾随的精准识别、闸机设备安全通行及开关门控制的无缝衔接。本AI防尾随研究应用主要研究内容在于采用多传感器信息融合的闸机防尾随方法,能够精准识别各种传统方式难以判断的复杂场景,有效的防止误夹、误放的情况发生。
2.1 AI防尾随应用技术路线
采用三种传感器分别获取同一时刻的图像,将获取的图像分别进行校正和对齐,并进行图像归一化处理,将归一化的图像传入预训练的神经网络模型,得到图像中人头的位置坐标。若人头数量大于1,则判断为尾随;若人头数量小于或等于1,则判断为非尾随。
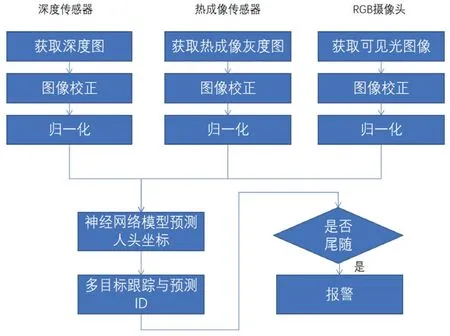
图1 AI防尾随技术路线
2.2 AI防尾随的技术应用
(1)融合归一感知技术。采用多传感器融合归一感知技术。传感器包括深度传感器、热成像传感器以及RGB摄像头,采用其中三种进行图像采集。采用三种传感器融合归一形成立体式探测,较传统防尾随探测更加精准。使用深度传感器获得检测范围内的深度图,深度传感器为结构光相机、双目相机、TOF相机;使用热成像传感器,获得检测范围内的热成像数据,将其转换为单通道灰度图像;使用RGB可见光摄像头,获得三通道彩色图像。将三种传感器获得的图像进行校正和对齐,并分别进行图像归一化,归一化公式见公式一。上述三种方式采集的图像获取时间差接近于0,可以以避免出现因没有帧同步而导致图像无法对齐的问题而引起的误差。

其中,xi表示图像上某点处的像素值,min表示图像中最小的像素值取0,max表示图像中最大的像素值取255。
三种传感器图像校正和对齐依赖于预先对传感器进行标定的结果。在分别标定完每种传感器后,即可采集到每种传感器的标准成像。然后对多传感器进行对齐标定。标定完毕后,通过映射矩阵可将深度传感器图像、热成像图像、可见光图像对齐到同一坐标系中。将归一化后的三种传感器图像传入预训练的神经网络模型,经模型前向传播后得到图像中人头的位置坐标。
(2)深度学习技术。AI防尾随技术采用深度学习技术。预训练的神经网络模型为:神经网络包括输入层、隐含层和输出层,其中,隐含层可以有n层,n为大于或等于1的正整数;隐含层中的某几层为特征提取子网络,可并列存在多个特征提取子网络,特征提取子网络之后的激活值为提取的特征。首先将至少两张图像分别传入对应的特征提取子网络进行特征提取,得到至少两组特征,采用对应位子相加、特征维度连接的方法将所有的特征进行特征融合,将融合后的特征传入目标定位子网络,经隐含层和输出层处理后得到图像中人头的位置坐标和置信度;根据预设的阈值与置信度进行比较,判断位置坐标。在对传感器图像数据进行特征提取时,通过深度学习技术,提取更加稳定、鲁棒的图像特征。正式应用时为训练成熟的神经网络模型。
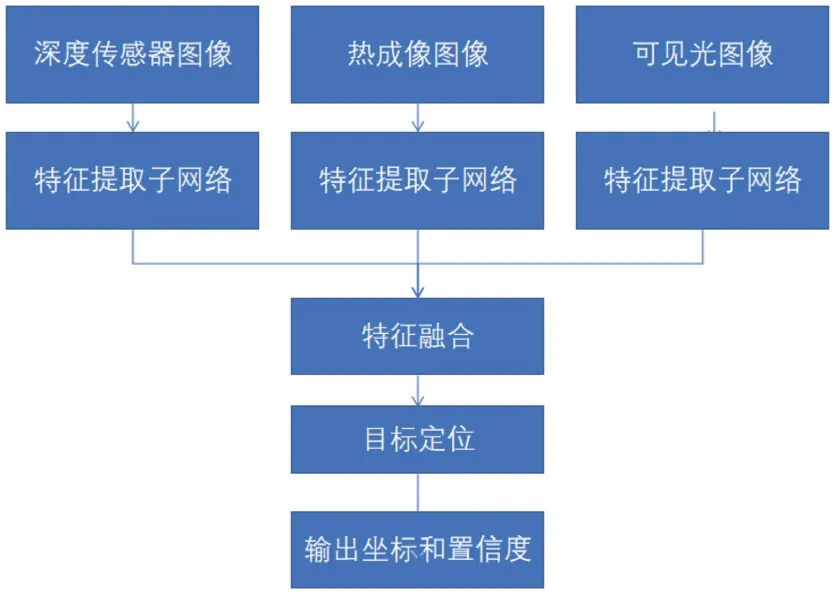
图2 神经网络模型预测人头位置流程图
(3)多目标跟踪算法。采用多目标跟踪算法用于自助通行的防尾随检测。跟踪检测过程中对每个目标进行跟踪,赋予其id号,监测目标行动轨迹,根据连续多帧的检测结果综合得到当前帧中每个目标的id号,能够过滤掉短暂出现的误检,同时也能够为短暂出现的漏检预测一组预估的位置坐标,从而实现更加精准的闸机防尾随监测。
(4)AI防尾随自助通行闸机的应用。机场旅客全流程自助服务包含值机、预安检、安检、登机等环节,当前在安检和登机场景智慧机场建设中自助通行主要采用闸机系统通行服务方式。基于机场旅客通行身份核验要求、闸机控制要求、监控要求、安全要求等,AI防尾随在闸机系统应用时重点考虑两方面:一是实现防尾随能力的提升,解决传统防尾随误识、漏识和异常通行问题;二是防尾随设计与闸机系统开关门控制、预警、安全控制的高效协同,整体上提高旅客通行效率和服务体验感,减少地服人员工作量。
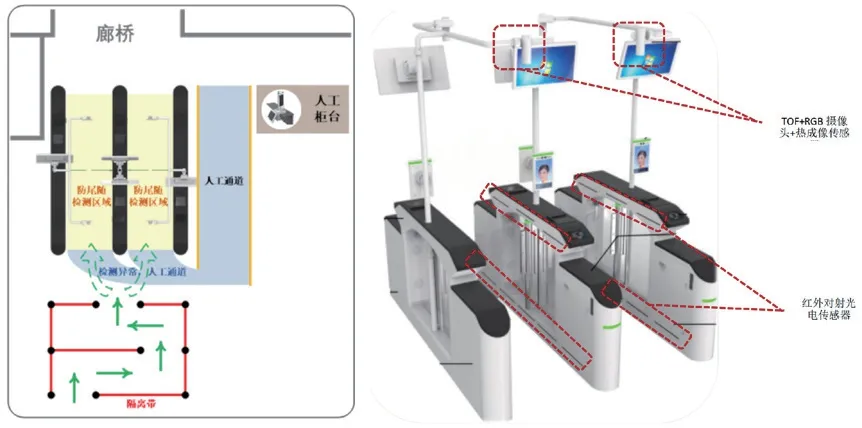
图3 闸机防尾随传感器配置及检测区示意图
防尾随功能实现:自助通行系统结合AI防尾随和红外光电防尾随技术,搭载TOF摄像头、热成像传感器以及RGB摄像头实现现场感知,并融合多模态防尾随算法,与闸机通行主控应用软件协同联动,构成一套完整的防尾随闸机的通行控制系统。
防尾随精准识别行为:闸机防尾随检测系统可识别旅客正常通行行为,识别干扰项,不会误判,包括但不限于以下干扰情况:携带背包(前背及后背)、携带拉杆箱(拉杆箱上搭置服饰)、各种发饰发色、各色帽子、各类发型等。闸机防尾随检测系统可识别旅客异常通行行为,不会造成漏判,并做出对应警示等。
配套辅助功能:当系统检测到识别区域内多于一名旅客,会触发防尾随预警,系统自动发出声光报警;并能判断潜在的尾随风险,并予以提醒,防止人员快速闯闸等违规行为。
3 AI防尾随技术及应用创新点
AI防尾随技术融合了多传感器识别判断,自优化图像处理算法,并配合闸机系统协同联动,满足了机场自助通行的高安全、高效率、高准确的业务需求,主要创新点如下:
(1)传感器信息融合方式创新:AI防尾随将三种传感器输出的图像经过特征提取后对不同传感器图像的特征进行信息融合,使用融合后的多传感器信息判断人头位置,能够使得检测出的人头位置更加准确,防止人头漏检、误检情况的发生,效果大大优于仅使用单一传感器信息进行人头检测的效果。
(2)防尾随图像处理算法创新:AI防尾随在图像特征融合与人头检测时使用深度学习技术,相较于传统的图像处理方法拥有更强的泛化能力和更精确的检测结果。基于AI防尾随技术设计的自助通行设备系统在投入应用后可以通过对各类识别场景的学习不断优化算法识别模型,若通行场景新的变化,只需升级通行检测算法软件,不需要改动硬件设备,自适应及升级能力较传统设备系统更强。
(3)与闸机系统间高效协同创新:AI防尾随技术在与闸机通行主控应用软件协同联动,构成一套完整的防尾随闸机的通行控制系统,实现了高效的协同。在防尾随功能方面,可监控的防尾随区域范围更广泛,识别行为更加精准;在通行逻辑控制方面,打通了与闸机开关门控制的逻辑,能有效的防止误夹、误放的情况发生。在预警提示方面,识别为尾随即会自动发出声光报警;并予以提醒,防止人员快速闯闸等违规行为,同时保障人员安全。AI防尾随与闸机系统高效协同,实现了闸机整体服务能力的跳跃式升级。
4 结语
经过笔者公司团队持续研究、开发,AI防尾随技术在机场自助通行闸机系统上已经实现产品化应用,目前在重庆江北机场安检通道、厦门福州机场和安徽芜宣机场登机场景正式使用,对通行尾随情况实现了有效监控,实现了机场旅客无故障自助通行,提升旅客服务体验感。
