基于无人机多视角摄影技术构建城市仿真三维模型应用方法
2021-03-25吴宗俊邱延林万程辉
吴宗俊,邱延林,万程辉,朱 彬
(1.四川大学 水利水电学院,四川 成都 610065;2.南昌工程学院 水利与生态工程学院,江西 南昌330099)
随着“互联网+智慧城市”概念的快速推广,人们划设管理由粗到精进行细化、可视化、动态化管理转变。“互联网+智慧城市”以云计算、物联网、城市移动互联网等信息技术为基础,进行“智慧城市”建设。建设的关键是精确获得城市实景三维数据,DSM,DEM,DOM等地形数据。没有高精度的技术支撑,“互联网+智慧城市”将很难完成[1]。因此,如何利用快速、高效航空摄影技术完成高精度的地理信息数据的采集及制作,构建“互联网+智慧城市”的仿真三维模型,已经成为“互联网+智慧城市”建设中需要重点关注的问题[2-3]。
基于多视角倾斜摄影技术的引进与应用,开辟了倾斜摄影技术应用的新领域。由于多视角倾斜摄影技术是一种新技术,因此需要对倾斜摄影三维建模方案进行研究,并针对倾斜摄影中不同角度采集的图像进行区域网平差。通过空三区域网平差后的倾斜摄影数据可以被用于构建正射影像,形成直观的“互联网+智慧城市”地面三维景观模型图[4-5]。在实际生产中结合多视角倾斜摄影数据具有很多特性,可以对城市建筑物进行快速的仿真三维建模,并由相对应建模软件自动对三维仿真模型上的各个面进行纹理搜索分析,并将最优化纹理自动映射到三维仿真模型上,形成智慧城市建设中最终需要的三维仿真模型基础数据[6-7]。赵宏等在倾斜摄影测量技术的智慧城市5D产品制作工艺实现文章中,阐述了基于倾斜摄影测量技术构建“互联网+智慧城市”实景仿真三维模型、DSM、DEM、DOM,对智慧城市5D测绘产品制作工艺研究,并将此工艺实际应用于昆明市507km2的主城区仿真三维模型产品制作的实施情况分析,结果表明基于多视角倾斜摄影技术满足5D产品的工艺,但对于纹理没有在文中做相关分析[8]。王琳、吴正鹏等利用无人机5镜头倾斜摄影技术获取某区域数据,并采用高分辨率遥感影像一体化数据处理系统——Pixel Grid进行影像数据处理,基于3D Max建模软件的二次开发应用,将倾斜摄影技术和3D Max建模优势有机结合起来,实现城市仿真三维模型构建和纹理自动映射的同时完成,同时提高城市仿真三维模型建立的效率[9]。李德仁院士针对多视角倾斜摄影光束平差法中未知参数过多的问题(例如可能导致平差解算不稳定),提出了带有相对姿态参数的倾斜摄影光束平差模型,结果表明:当相机之间曝光时长小,且相对姿态参数稳定时,该方法的自动空中三角测量(简称空三)处理精度较高,单位权中误差精度为0.46像素,像素点平均残差精度为0.27像素,需要改善密集匹配算法的精度和效率,提高三维仿真建模的精度,结合地面获取的高分辨率影像,对城市三维模型中建筑物立面纹理进行增强[10]。本文基于无人机多镜头倾斜航摄测量技术方案,构建成都市仿真三维建模,分析多视角倾斜航摄测量技术在智慧城市建设中的应用价值。
1 真三维模型的构建流程及关键技术
1.1 模型构建流程
基于无人机多视角倾斜摄影技术构建“互联网+智慧城市”仿真三维模型技术流程如图1所示。
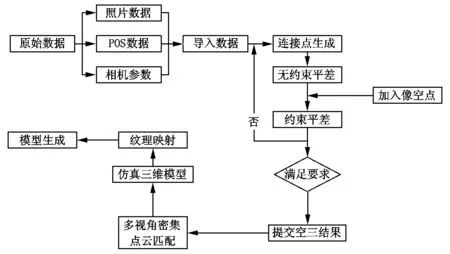
图1 城市仿真三维模型构建流程图
数据的处理过程:①通过对原始数据的预处理,消除无人机本身所固有的误差;②倾斜影像数据导入建模软件进行内定向和畸变校正,其中内定向的目的是确定航拍空中坐标系与像片坐标系之间的关系以及数字影像可能存在的变形,而影像畸变校正是为了消除无人机在拍摄过程中因外界环境所引起的重复变形;③将倾斜影像进行空中三角测量,其中包含光速法、区域网平差和区域网格联合平差,目的是获取相片的6个未知量,分别是:维度、经度、高程、主垂面方位角、像片倾斜角和像片旋转角。通过多角度图像密度匹配,得到加密的三维点云数据,构建城市三维仿真模型,其中包括DSM和DEM数据模型;④根据城市三维仿真模型中各小三角形的法向方程和二维图像中的夹角,自动选择最优纹理映射信息,实现纹理与模拟三维模型的拼接;⑤输出城市的仿真三维模型。
1.2 多视角倾斜摄影光束法平差
空中三角测量有三种解析方法:跑道解析空间三角测量、独立模型解析空间三角测量和波束解析空中三角测量。跑道方法的分析对象是一个跑道模型。将由多个立体图像对组成的单一模型连接成跑道模型,然后将跑道模型作为单元模型处理[11]。但是,由于该方法在构建自由航带时将上一步的结果作为下一步的基础,误差会迅速累积,并且偶然误差也会累积,从而影响最终结果模型的精度。独立模型解析法是将单个模型相互连接,既可以构成一个导航带,也可以构成一个区域网格。区域网格建设过程中的误差被限制在单一模型的范围内,不会发生传输积累,这样可以克服航带法空中三角测量的不足。但这种算法费时,对计算机的要求较高,而且只适用于对偶然误差的平差。波束解析空中三角测量是一束光的图像调整到基本单元,共线方程的中心投影方程为基础的调整,尤其是在检测和自我校准中来消除系统误差,使其精度较高,可以得到厘米级加密点的精度,在本文中使用波束法解析法对空三进行计算[12]。
由于摄影技术对同一地物要求,同名点重叠度在60%以上。空三相对应的匹配点以及后续所产生的误差需要调整,在实际运用过程中分为以下几个步骤:①通过各光束在空间中的旋转和平移,可以使公共点的光区相交于最佳位置,并将整个区域带入已知控制点的坐标系中。②将整个研究区域网格化,形成区域网格,并进行整体区域平差,在连接点上构建多图像覆盖、多角度、精度好的区域网格。③加入控制点进行整体研究区域网格联合平差解算,将整个区域网格放在控制点相对应的投影坐标系。④输出空三解算优化后的高精度图像外方位元素成果,用于纹理的提取和创建仿真三维模型。
平差原理:首先根据下视影像的外方位元素以及相机相对应的姿态角解算出侧视影像的粗略外方位元素,图像匹配后,将所有影像的参数作为平差参数整体进行光束法平差。计算平差方程为
其中(X,Y,Z)表示地物坐标;(x,y)表示像点坐标;f为相机焦距;Rimu表示惯性测量单元坐标到物方空间坐标系之间的旋转矩阵;Rmis表示像空坐标系到LMU坐标之间的旋转矩阵;(Xs,Ys,Zs)表示GPS摄站坐标;(X0,Y0,Z0)、(X1,Y1,Z1)表示GPS获取摄站坐标系统误差改正参数;t表示GPS获取时坐标的时间;λ表示比例系数。
运用该平差模型的法方程求解出加密点物方坐标的改正数以及其他参数的改正数数值,用于计算影像的外方位元素。

1.3 无人机多视角图像构建仿真三维模型
基于航空三维一体优化后的高精度外法向元素,构造立体图像,采用多角度图像密集匹配技术,采用不规则的网格对研究区域进行划分的空间平面作为基础。充分利用多视点图像的特征纹理信息和图像信息进行密集点匹配,合理利用多视点匹配的冗余信息避免对匹配的影响,提高图像的计算效率,精确获取地物高密度三维点云数据[13]。利用点云构建不同层度的细节下的TIN模型,通过对模型内部三角形的角度和边长进行优化,使三角形的大小与实际地物尺寸成相应的比例,通过连续分析曲面的变化特征,简化了相对平坦的区域,减小数据的大小,进而得到城市仿真三维模型的矢量栅格数据。
1.4 纹理自动映射
基于倾斜图像的纹理映射是一种自动纹理构造技术。特别是无人机倾斜图像一般分辨率较高,部分图像可以达到厘米分辨率,足以反映地面模型的微小信息。因此,在图像正方形区域内的图像可以作为构建纹理,满足一般建模精度的要求[14],对于建筑,模型纹理主要是侧面纹理和顶部纹理。因此,所需的纹理很容易获得,但由于倾斜图像变形较大,手动图像校正方法需要大量的工作。因此,需要设计相应的算法,将航拍图像上的像素点重写到仿真三维模型表面上。纹理重建的思想是:在仿真三维建模平台上,将倾斜图像加载程序,使用后空三优化精度的内外方位元素,恢复倾斜摄影的姿势,并建立索引图像和三维仿真模型之间的关系,对图像中的像素重采样,放回模型,自动完成纹理映射[15]。
2 实例应用及精度分析
2.1 研究区概况
为了验证基于无人机多视角摄影技术构建城市仿真三维模型应用方法、成果精度和影响因子,以成都市为研究区域。试验区地处四川盆地西部,青藏高原东缘,东北与德阳市、东南与资阳市毗邻,南面与眉山市相连,西南与雅安市、西北与阿坝藏族自治区接壤,地理坐标为东经102°54′~104°53′,北纬 30°05′~31°26′。实验区实景三维建模航拍影像地面分辨率优于0.05m,试验区最高建筑物高度为248m,高程在435~520m之间。
对研究区进行航拍,采用X-8固定翼无人机搭载睿铂DG-3型5镜头相机进行影像采集,相机镜头对地物实景的拍摄角度为115°,相机长度为170mm,宽度为160mm,高度为240mm。其中,相机的物理参数如表1,本次对实验区倾斜摄影共飞行10个架次,其中在高层建筑集中区域外加一条构架航线,获得5镜头影像数据57 845张,数据量约为563Gbit。在试验区进行设置40个现场图像控制点和16个现场检查点,对区域模型进行控制,并对结果的准确性进行评价。

表1 相机物理参数
根据研究区域地形特点,采用南北飞行,航向重叠度和旁向重叠度为80%,70%,其中研究区域航线分布情况如图2,使用本文上述的实验技术和方法,构建城市仿真三维模型和纹理映射后的不规则三角网、DSM模型和真三维模型如图3~4所示。多视点,高重叠图像密集匹配产生的不规则三角网有效地表达几何特征的特点,以及不同密度三角网表达特性的地面物体的几何特征的几何特征提取纹理信息的特点;同时,纹理信息均衡处理后的自动映射,得到真正的仿真三维模型,如图5所示。
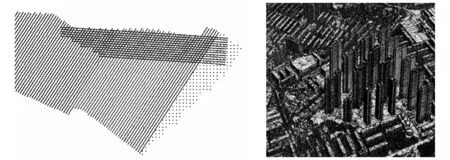
图2 研究区航线示意图 图3 不规则三角网

图4 实景DSM模型 图5 地物实景仿真三维模型
2.2 模型精度分析
2.2.1 空三加密精度
在计算空三加密区域网时,全部40个图像控制点和16个外场点作为检查点。通过计算野外测量的三维坐标与区域网平差计算,研究了区域网的实际精度如表2所示,其中空三计算结果精度如图6。
由表2可以看出,计算的空三加密定向点的平面最大误差为0.144m,高程垂直方向的最大误差为0.058m,满足《地形图航空摄影测量内业规范》中1∶2 000比例尺平地地形中基本定向点平面误差不超过0.30m、高程不超过0.30m的要求。检查点的平面最大误差0.302m,最大高度误差为0.056m,满足《地形图航空摄影测量内业规范》中1∶2 000比例尺平地地形检查点的平面误差不超过0.4m,标高不超过0.5m的要求。

表2 空三加密精度

图6 空三计算结果精度偏差
图6表示空三计算结果精度,其精度在5cm以内用蓝色显示,5~7.5cm之间用淡蓝色显示,7.5~10.0cm之间用浅绿色显示。可以比较直观得出空三计算结果整体精度在5cm以内,建筑物较高且比较集中的区域精度在7.5cm左右,用浅绿色显示。
2.2.2 三维模型精度
在实验区的真实三维模型区均匀布置16个现场检查点,以评估仿真三维模型结果的准确性。将现场测点的三维坐标与三维模型中相应点的坐标进行比较,具体情况如表3所示。由表3可以看出,研究区实景仿真三维模型平面最大误差为0.264m,中误差为0.171m;最大高程误差为0.264m,中误差为0.122m。
运用Pix4D-mapper软件对模型进行缩放与比对,可以直接提取真三维模型中的信息,其中包括地物纹理、颜色、外形、相对位置等。实景模型比较完整且与实际景物相符合,各地理要素之间联系紧密,纹理清晰,如建筑轮廓、窗户、等细节情况较好。按照《三维地理信息模型数据产品规范》(CH/T 9015—2012)满足Ⅰ级成果精度的要求。
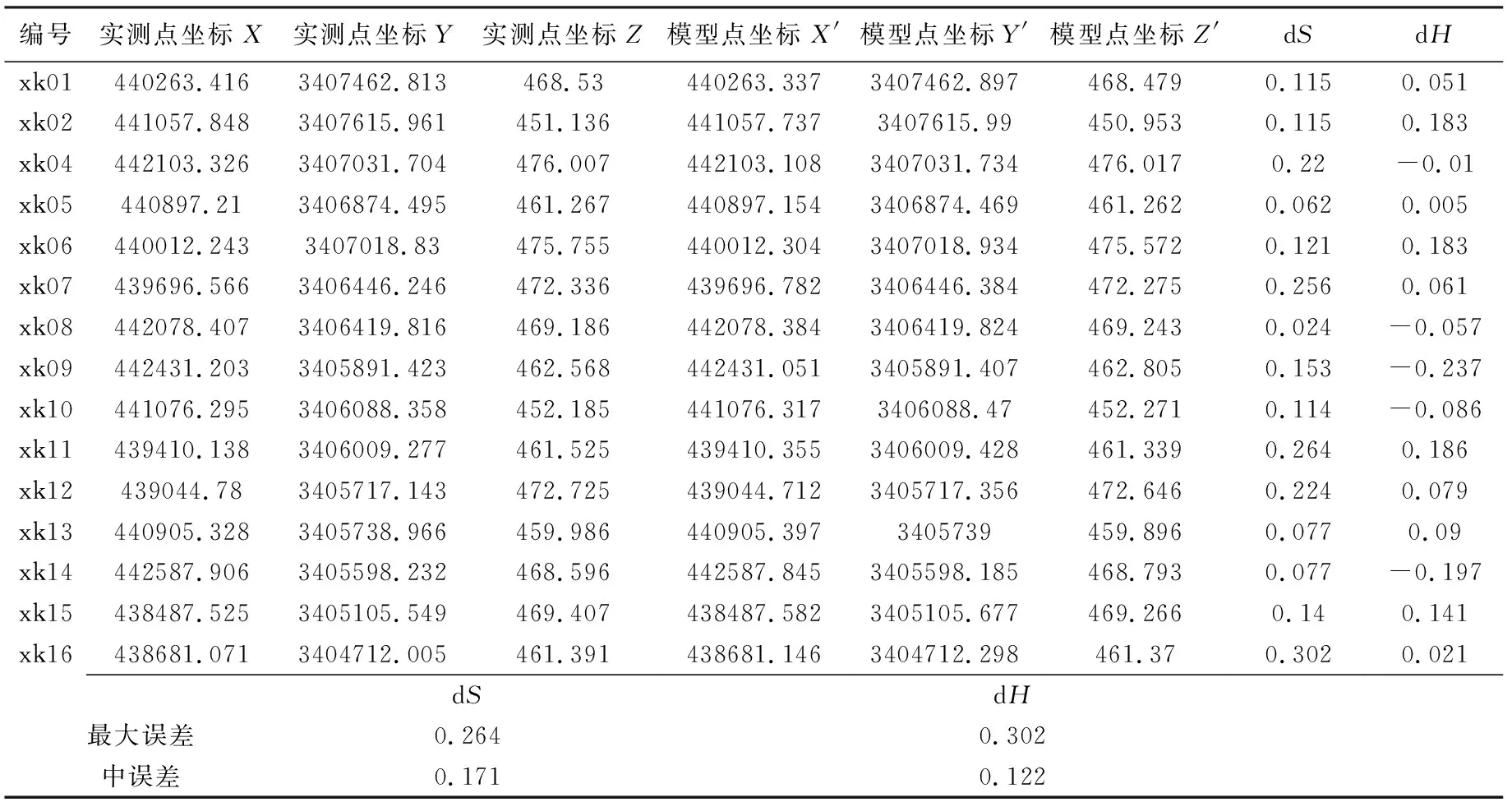
表3 真三维模型精度评定
3 结束语
本文利用无人机多视角倾斜摄影技术、全球定位系统(GPS)、以及ContextCapture Center和MasterPix4Dmapper软件处理,阐述了仿真三维模型的构建流程和方法,通过倾斜摄影联合区域网平差、图像匹配和纹理映射等环节。在人工少量干预的情况下快速构建城市仿真三维模型,并分析计算结果,对仿真三维模型计算结果进行精度验证,符合相关规范要求。该方法适合城市、乡镇,地形比较平缓的区域构建三维模型,基于无人机摄影技术构建模型的成本较低,周期较短制作结果精度高,在智慧城市建设中具有深远而重大的意义。
