变电站室内二次屏柜无人机巡检系统研究
2021-03-24孙小磊朱子轩汤宗尧
孙小磊,林 童,陈 昊,朱子轩,洪 宇,汤宗尧
(1.国网江苏省电力有限公司超高压分公司,江苏 南京 211102;2.国网江西省电力有限公司上饶供电分公司,江西 上饶 334100;3.三峡大学,湖北 宜昌 443000;4.国网江苏省电力有限公司连云港供电分公司,江苏 连云港 222000)
0 引言
随着国民经济的发展,电网结构日益强大,变电站数量也随之增多。新时代背景下,电网公司对变电站的精益化运维管理提出了更高的要求[1-2],这些与电网公司结构性人员紧缺的矛盾日益凸显[3],因此亟需寻找替代人工巡视的方法。随着无人机技术发展,无人机已具备部分代替人工巡视的能力,具有长续航、多配件挂载和智能化水平的无人机将在电网有更广泛的应用[4-6]。而随着智能技术的普及,无人机结合人工智能技术,将进一步提升变电站设备巡视和异常检测水平,将电力巡检向更智能的方向推进。文献[7]-文献[11]讨论了变电站内无人机巡检技术,但大多讨论无人机巡检在变电站一次现场的应用,由于变电站室内巡检(如保护室巡检),需观察细节多,路线规划复杂,目前针对变电站室内无人机巡检的研究仍比较少[12]。在此背景下,本文针对变电站室内二次屏柜无人机巡检的关键问题开展了相关研究,提出了巡检任务的动态规划算法和图像智能识别方法,在江苏地区某500 kV变电站室内的现场应用验证了所提方法的有效性。
1 二次屏柜立体巡检建模
为实现室内无人机巡检任务的快速制定与执行,需要建立变电站室内二次屏柜的三维立体巡检的数字化模型,该模型包括变电站室内设备的装置类型、位置坐标和检查点位等信息。对于变电站建模,通常有几何实体建模、参数化建模和激光扫描建模等方法[13]。由于变电站室内二次屏柜形状相对规则,保护、测控装置等多采用模块化设计,因此宜采用参数化建模方式。由于XML 可扩展标记语言(Extensible Markup Language)能够在描述数据内容的同时,展示数据之间的关系,具有良好的可扩展性、传输简便性[14],因此根据室内无人机巡检任务所需信息,采用XML语言描述变电站室内二次屏柜立体巡检模型,包括场景、组、屏柜、装置、无人机、无人机进出点、无人机检查点和其他物体等模型,其类别与描述如表1所示。
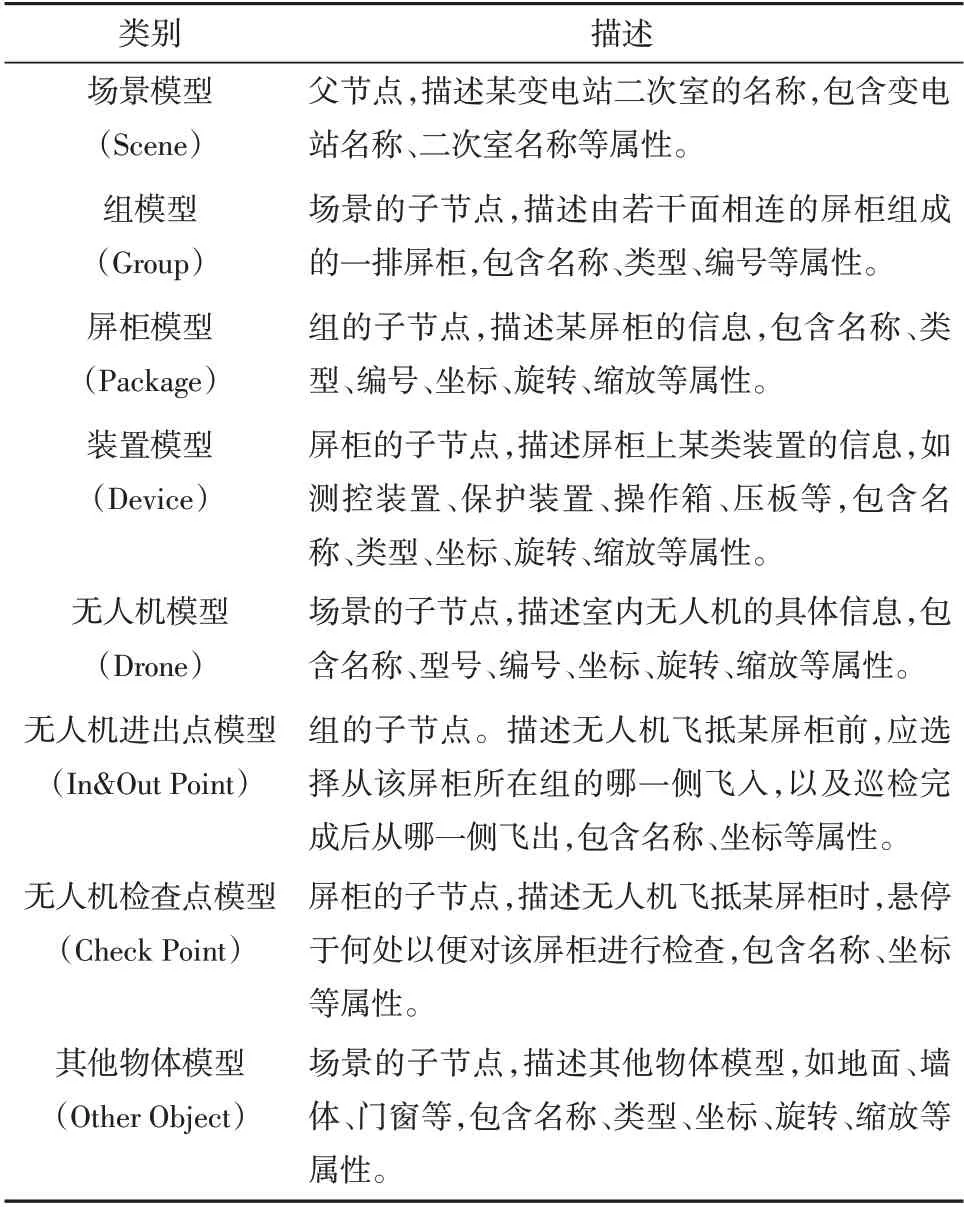
表1 变电站室内二次屏柜立体巡检模型表Table 1 Three dimensional inspection model of indoor secondary panel and cabinet in Substation
通过XMLSpy软件展示二次屏柜巡检模型XML文件结构如图1所示。

图1 某变电站500 kV保护室立体巡检XML模型文件Fig.1 XML model file of three-dimensional patrol inspection in 500 kV protection room of a substation
对于参数化建模,需要事先建立各类设备的标准模型库。常用的模型设计软件有3D Max、Maya、C4D和SolidWorks等。将建立的标准模型库导入三维引擎软件并解析XML模型文件,即可自动生成变电站室内二次屏柜三维模型场景,图2 即为二次屏柜立体巡检的部分标准模型。本文选用Unity作为三维引擎,通过C#脚本文件,实现XML 模型文件的解析、场景的生成和无人机路径的自动规划[15,16],如图3所示。

图2 标准模型库Fig.2 Standard model library
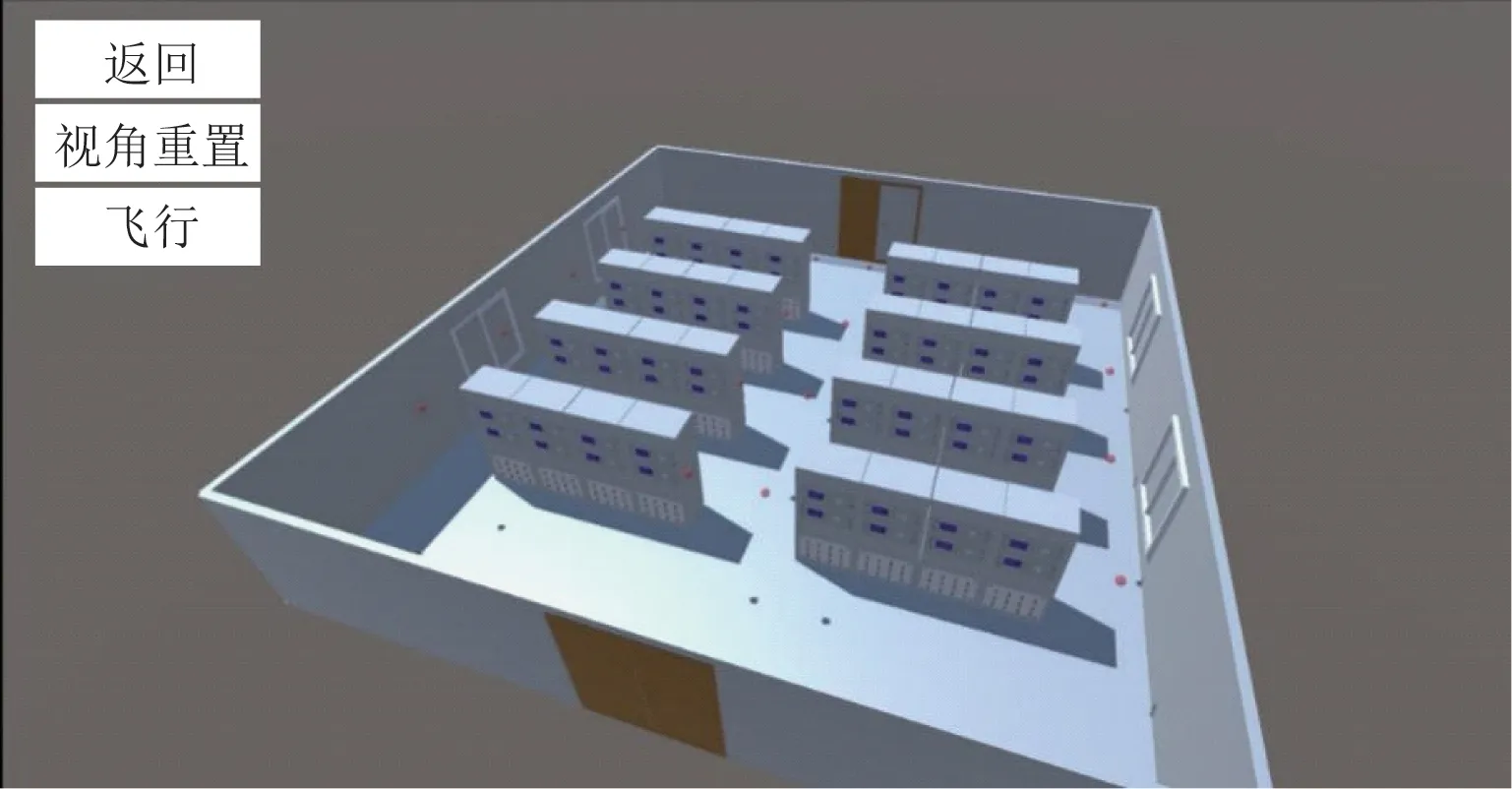
图3 自动生成的三维模型场景Fig.3 Automatically generated 3D model scene
2 无人机飞行控制
由于变电站室内全球导航卫星系统(GNSS,Global Navigation Satellite System)信号通常较弱,定位精度不高;而超宽带[17](UWB,Ultra Wide Band)定位系统成本较高,且传输信号易受二次屏柜阻挡产生非视距误差[18](NLOS,Non Line Of Sight),因此本文构建一种基于地面QR(Quick Response)二维码坐标进行定位的低成本室内无人机定位方法(地面QR 码定位法),即无人机通过扫描地面坐标QR码来标定自身位置并进行姿态调整。QR 码标定法精度明显高于GNSS 定位,成本大大低于UWB定位,地面QR码定位法示意图如图4所示。
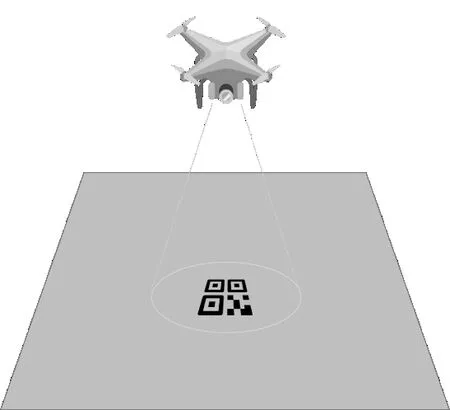
图4 无人机扫描QR码定位示意图Fig.4 Schematic diagram of QR code location scanned by UAV
在室内二次屏柜三维模型的基础上,为实现任意屏柜组合的巡视路径规划,需要设计相应无人机飞行路径规划算法。
首先,约定无人机飞行应遵循以下规则:
1)无人机飞抵某屏柜时,应从该屏所在某排屏柜规定的点位进出;
2)无人机与屏柜保持相同平面飞行,不可越过屏柜从上方飞行;
3)无人机飞行轨迹应遵循正交化原则,即每段轨迹只能沿某一坐标轴飞行。
根据以上原则,设计无人机飞行轨迹自动生成算法,伪代码如下:
输入:需要巡视的屏柜;
输出:无人机飞行轨迹列表;
从数据库获取需要巡视的屏柜检查点、所在组进出点、无人机起点坐标等数据;
获取需要巡视的屏柜所在组列表;
将无人机起点加入轨迹列表;
在需要巡视的屏柜所在组中,选择距离无人机最近的进出点并加入轨迹列表;
将该组中所需巡检屏柜的检查点加入轨迹列表;
If 组数=1
在该组中,选择距离无人机起点最近的进出点并加入轨迹列表;
Else
从组列表中删除该组;
While(组数>0)
在剩下的组中,选择距离上一组无人机飞出点最近的进出点并加入轨迹列表;
将该组中所需巡检屏柜的检查点加入轨迹列表;
If 组数=1
在该组中,选择距离无人机起点最近的进出点并加入轨迹列表;
从组列表中删除该组;
将无人机起点加入轨迹列表;
正交化轨迹列表。
图5中绿色线即为自动生成的某二次室部分屏柜无人机巡检飞行轨迹。
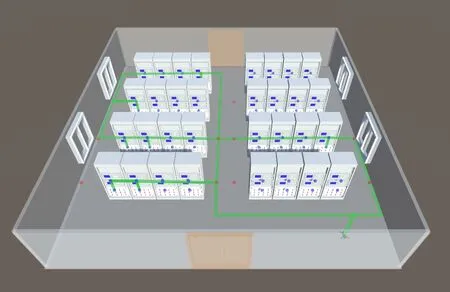
图5 无人机巡检轨迹示意图Fig.5 Schematic diagram of UAV patrol track
3 二次屏柜关键设备识别
无人机到达指定检查位置后,通过摄像头采集图像,发送至控制后台分析。后台程序根据与训练模型,对二次屏柜的压板投退状态、指示灯状态等进行识别,将识别结果与数据库中正常设备运行状态对比,判断当前设备状态是否正常。
针对二次屏柜关键设备状态识别,用改进的SSD_Inception 模型进行图像识别[19]。SSD(Single Shot Multi-Box Detector)网络是一种端到端的单次多框实时检测的深度神经网络模型[20,21],而Inception 结构是GoogleNet 中的一个具备不同尺度卷积核的模块[22-24],将Inception 结构嵌入SSD 所得的SSD_Inception 模型,具备良好的时效性和准确性,可以兼顾不同尺度的目标检测,其结构如图6所示。
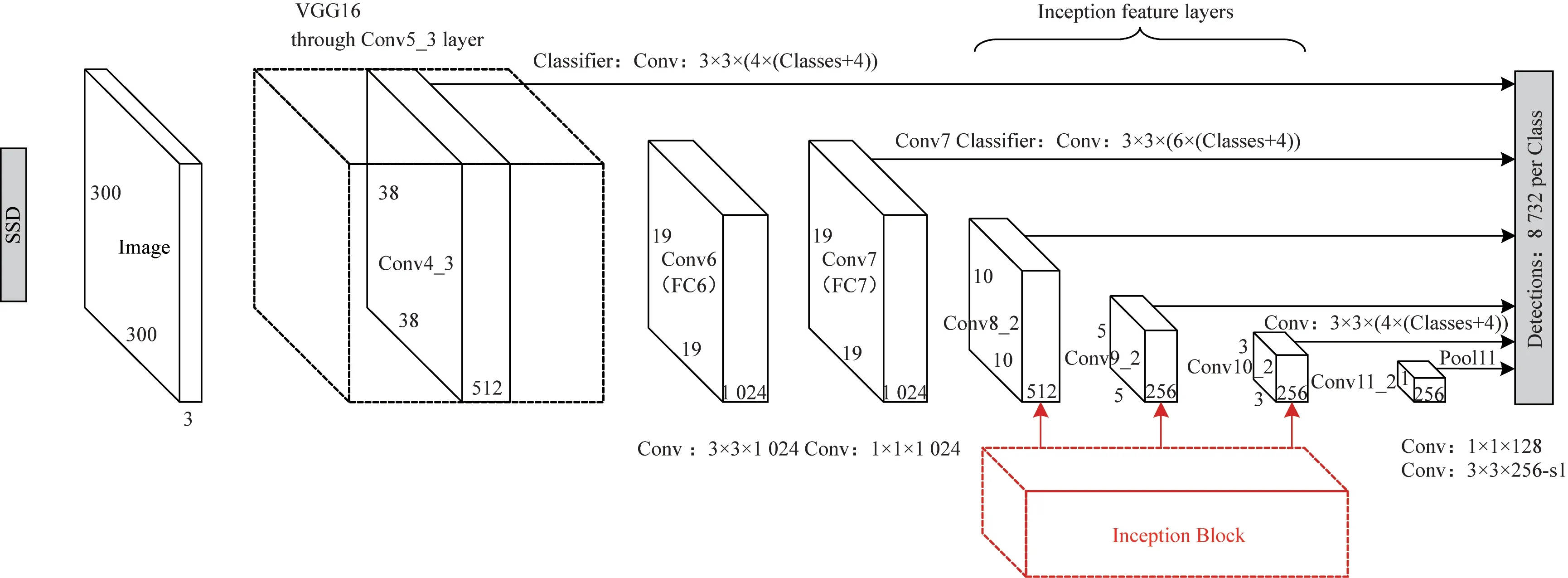
图6 SSD_Inception 模型网络结构图Fig.6 SSD_Inception model framework
采用上述模型,通过训练,可以实现对二次屏柜的压板投退状态、指示灯状态的有效识别,并经OpenVINO 工具套件对模型进行优化后,具备较快的响应速度[24-30]。
4 现场应用
选用大疆御Mavic Air 作为无人机平台。大疆御系列作为成熟的无人机平台,具备稳定的飞控系统、良好的图传能力和较长的续航时间,其摄像头带有云台稳定系统,保证了无人机在室内飞行过程中的照片拍摄的清晰度。大疆御系列无人机具备开源SDK,支持Android、iOS、Linux 和Windows 等多平台的二次开发,可以满足现场实验需求。图7为现场测试图片。

图7 巡视中的Mavic Air无人机Fig.7 Mavic air in patrolling
选取不同视角下保护屏柜状态指示灯和压板图片共143 张,其中包含压板样本2 033 个,状态指示灯样本856个,通过labelImg工具对图片上的压板开合状态和指示灯亮灭状态进行人工标注,按8:2 的比例将样本分为训练集和评估集输入SSD_Inception 模型,设置训练次数为10 000次,批大小(Batch Size)为2,其损失率曲线如图8所示。
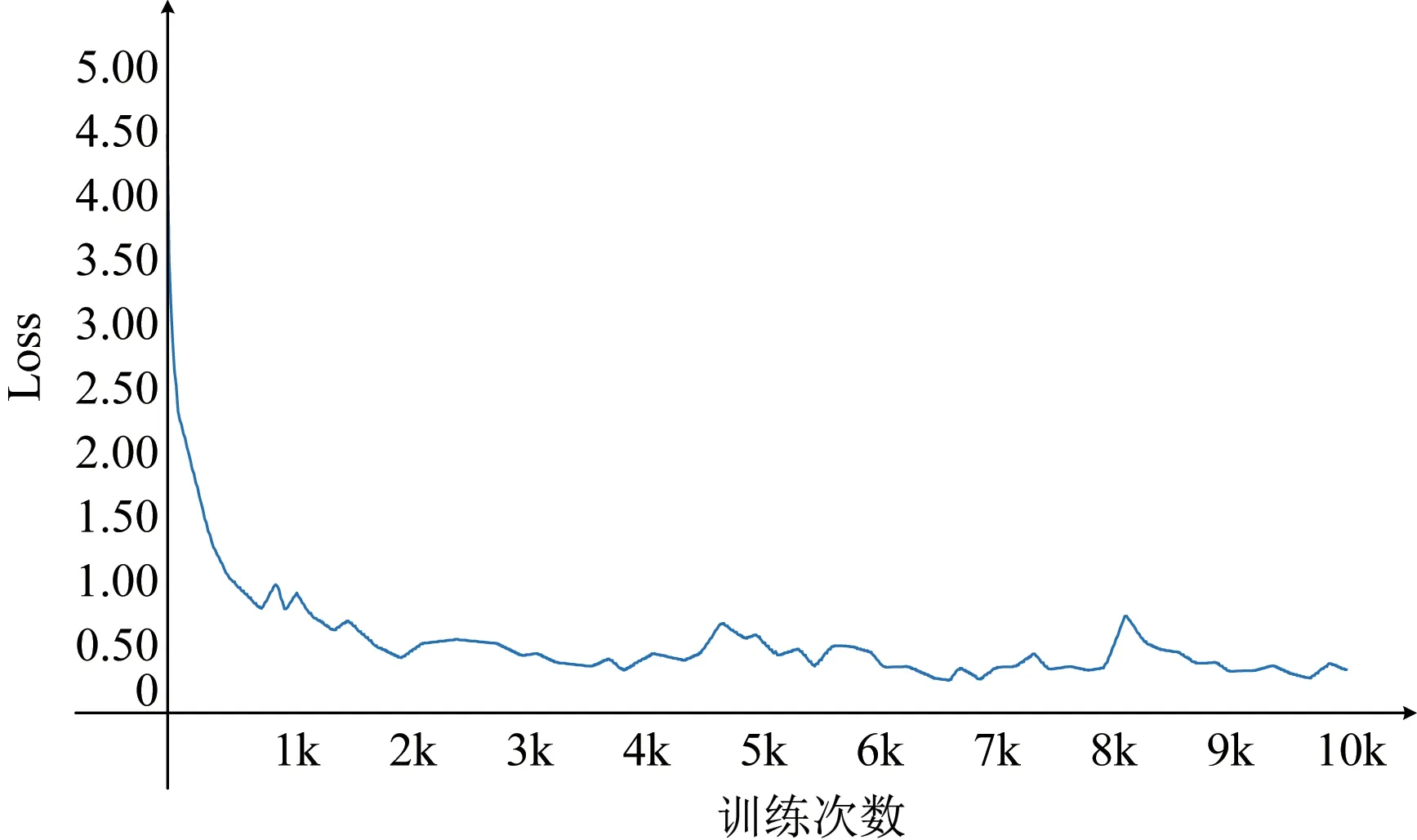
图8 损失率曲线Fig.8 Loss rate curve
训练完成后获取该模型的静态图文件,再经OpenVINO 工具套件优化,可以提升图像识别效率。对40 张压板和状态灯图片进行测试(如图9),结果如表2所示。

表2 优化后模型图像识别测试结果Table 2 Optimized model image recognition test results

图9 部分状态灯和压板检测结果Fig.9 Test results of some status lights and pressing plates
现场实验结果表明,本文所提方法可以优先实现图像智能识别,具备人工巡视替代的技术条件。
5 结语
在变电站无人化值守的趋势下,为实现变电站二次室的无人化巡视,本文设计了基于XML可扩展编辑语言的变电站二次室建模方法,通过模块化、参数化的设计方法实现模型的快速建立;提出了一种适用于无人机巡检的地面QR码定位法设计了巡检任务的动态规划算法;通过对SSD_Inception 目标检测模型的研究,实现对采集照片的智能识别。通过对以上关键性问题的研究,提供了无人机在二次保护室的无人化巡检的整体解决方案。
在此基础上,为进一步提升无人机巡检效果,未来将在以下几个方面继续深入:
1)基于IEC 61850 的无人机飞行控制协议,将无人机作为IED纳入智能变电站管理体系;
2)增强无人机巡检的指针式、数字式仪表读数识别能力;
3)优化无人机定位控制算法,实现更高精度的无人机室内定位。
