图书馆智能借还书机器人
2021-03-24刘奕棋莫琦张健李颖多陈泽霖
刘奕棋 莫琦 张健 李颖多 陈泽霖
(广东石油化工学院,广东茂名 525000)
1 项目实施的目的及意义
在老式的人力工作模式之下,图书馆工作人员每天都必须花费大量的时间和精神去摆放参差不齐的书本去分类、整理,然后把书籍摆放到原来的位置,而且在人的专注力没有的时刻保持在同一水平上就容易摆放出错,工作重复性高且繁琐。随着图书的不断增多,图书馆劳动力紧缺,而现人均工作量过大,管理人员严重不足。每一个工作人员就估计要负责一整层的典籍分类和整理摆放,工作强度大、精力耗费多,人力成本上涨。为了节省人力物力财力为了减少图书馆工作人员的工作量,本团队研发的智能借还书机器人可以引导图工作人员运送书籍并摆放到指定的合适位置,在摆放工作完成之后机器人会自动对的书籍进行遍历检查,识别书籍是否摆放到错误,并将错误信息反馈给管理人员核实,机器人的辅助大大减少工作人员进行重复繁琐的工作,减少人力资源的浪费。此外机器人还可引导读者借还书籍,解决了找书难的问题。
2 系统框架
系统整体框架由语音识别交流、地图构建与路径规划、激光雷达扫描识别三大部分组成如图1所示。

图1 系统整体框架Fig.1 Overall framework of the system
3 系统模块的功能实现
系统的硬件核心控制处理部分,采用了STM32F7,它的高主频可以达到2 16 M Hz 足以处理本项目所要处理的数据,该处理器的优点是内置A D C、D A C 转换模块,便于模拟信号采集和输出。语音信号的识别交流需要经过两个过程:训练学习过程和识别过程。首先,我们用音频接收设备将语音信号转换为电信号后经过S T M 3 2 内部的ADC模块处理为数字信号然后进行降噪处理后对其进行特征提取,再通过语音数据库和语言数据库进行训练为其建立每一个字的声学模型和语言模型,这个过程是训练学习过程。其次,将外部输入的语音信号进行特征的提取后与模型进行对比,找出相应的文字信息,此为整个语音识别的整个过程。显然,这种识别的结果的准确性与特征的提取、语音模型建立的好坏、模板的准确与否都有着直接的关系。
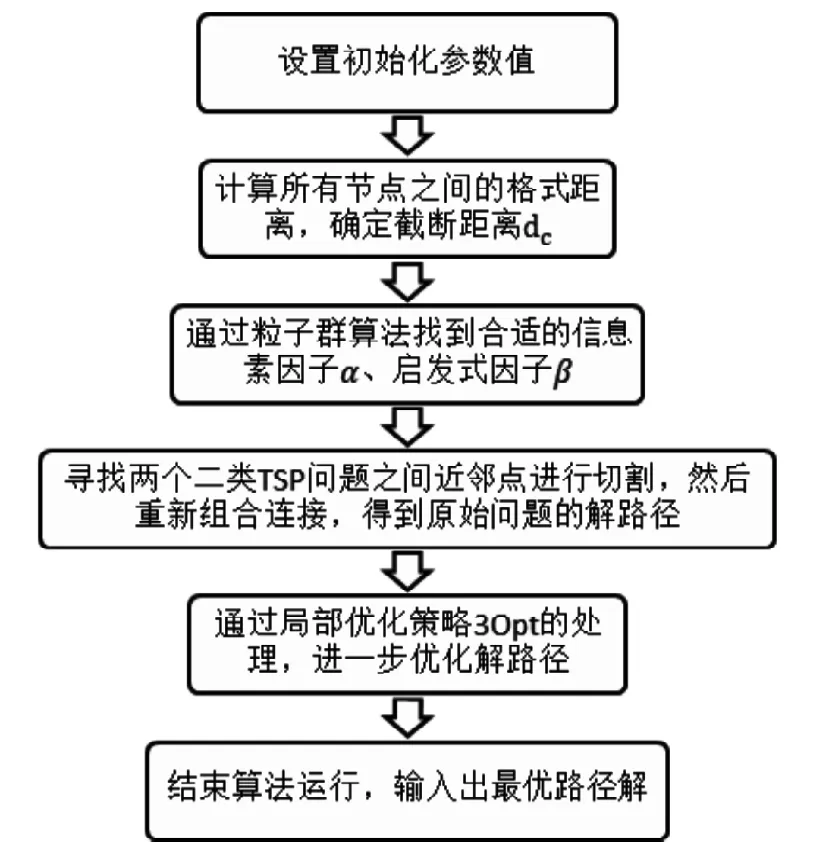
图2 蚁群算法流程图Fig.2 Flow chart of ant colony algorithm
激光雷达是机器人的眼睛,是重要的硬件组成部分,我们要测量机器人的眼睛看到障碍物之间的距离就通过激光雷达来实现,必需保证接收的回波信号足够的完整才能更加准确地测出距离,而计算激光回波信号的依据则是激光雷达方程,通用激光雷达方程[1]:PR=,这个系统有考虑到光在室内传播的衰减与损耗和接收到整个系统运作中光功率的大小。本项目借还机器人采用的激光距离测量模块是6 K F 4,它有着测量距离远,精确度高,寿命长的优点。6KF4激光雷达采用自身独有的测距算法,通过内部自身所具备处理频率极高的数据采集系统,而它的每秒的采集的点数可到达4000点,而在每一次测量彼此之间的距离时,6KF4的脉冲调制激光器迸射激光信号,这种激光信号投射在目标实体上后产生反射光斑,该反射光斑经过一组光学透镜由6KF4的图像数据采集处理系统接收,经过内嵌信号处理模块进行实时解算,确保了测距的实时性和准确性。目标物体与6KF4的距离值以及相对方位角度值是从通讯接口中输出数据。通过机器人激光雷达对图书馆地面环境的扫描以及数据的不断积累和学习,可以构建出相应的地图模型。
软件部分的核心是路径的规划和识别,为了让机器人行走的路线更加的准确和高效,我们为引入了蚁群算法,用它来优化处理借还机器人行走的路线,以便其可以寻找出更加捷径的道路,算法优化过程如图2所示。
系统路线优化采用了蚁群聚类(Density Peak clusteringa-lgorithm-ant Colony System)算法,利用蚂蚁分工合作以及自身的优势去做有利于自己的思想,将大规模的TSP案例进行节点分开一列一列进行总结,然后应用更新后的蚁群算法找出新建立的二类TS P问题的路径,通过改进的密度峰聚类算法确定拐点,根据拐点的位置筛选出潜在的聚类中心,最终切割断点重组构成最优路径。蚁群聚类算法在确保目标体求解系数精度的前提下,可以很好的缩短算法的计算时间,而且可以更加有效率拉低了算法复杂度。蚁群聚类算法系统先进行设置初始参数值,例如最大迭代次数、城市节点上信息素初始值、信息素挥发参数的初始值、蚂蚁数量等,然后根据初始TSP问题数据集给定的节点坐标,运算节点与节点之间的欧式距离,达到进一步优化重新连接后的全局路径的效果。
4 结语
随着机器人的应用技术的不断完善,传统的图书馆模式终将被机器人的到来而改变,机器人不仅帮助借阅者提高寻找书籍的效率,而且也提高了图书馆工作人员日常工作的效率。机器人在不断的重复性工作中不知疲倦,这在对人对事上都有着不错的影响,机器人在未来终会代替更多的人力资源,让需要发挥人性的地方有更多的人在,只让机器人提高我们的工作效率。
