油烟管道清洗机器人的设计
2021-03-24郑明东薛蕊纪光洋王大志
郑明东 薛蕊 纪光洋 王大志





摘要:针对餐厅、家庭、酒店等厨房中油烟管道清洁工作,设计了一种油烟管道机器人,该机器人可以有效清洁存在于管道内壁中的油烟凝固堆积问题。机器人用过控制系统、清洁系统、摄像通讯、传感器模块组成。设计主要使用STM32单片机做控制中枢,通过摄像头传输图像识别管道中油烟堆积情况,控制清洁系统对管道进行清洁。在图像传输的技术上增加GPS定位,从而实现远程通讯并远程通讯的目的。行走方式采用履带式设计保障机器人在管道有足够的吸附力,确保机器人有越障和爬坡能力。改设计有效解决了因空间狭小清洗困难甚至无法清洗的的问题,降低了环境污染和安全隐患,有效提高了作业的安全性和作业效率。
关键词:油烟管道;GPS;履带式;远程控制;图像传输
引言
随着我国经济的飞速发展,对于生活质量的要求越来越高,餐饮行业的发展迅速,遍地开花的酒家、宾馆、饭店,萌生出更长远的经济道路。但是,在带来人们完全的美食享受和生活需要的同时,酒家、宾馆等厨房等排出的油烟对环境的污染日益成为严重困扰城市居民生活的主要环境问题。管道积存的大量油垢更会给环境带来极大的污染和安全隐患。油烟管道清洗机器人主要针对各种油烟管道,尤其是狭窄管道以及具有一定斜度甚至是垂直管道的油垢清洗,能够在危险区域进行远程作业,解放了劳动力、降低了劳动成本,有效提高了作业的安全性和作业效率,提高了我们的环境质量。
1硬件系统设计
STM32F103内核为ARM32位Cortex-M3,最高工作频率为72MHz,STM3232F103单片机,具有成本低、低功耗的特点深受追求高性能电子爱好者的青睐。不同存储空间的Flash存储器和SRAM存储器;具有上电复位和掉电复位功能,工作电压低,并且拥有休眠,停止,待机3种低功耗模式,这些大大降低了单片机的工作能耗;STM32系列单片机有SWD和JTAG两种调试方式,选择性强。单片机资源丰富,功能强大,拥有高频率的内核,工作速度快,效率高的特点。整体设计框图如图1所示。
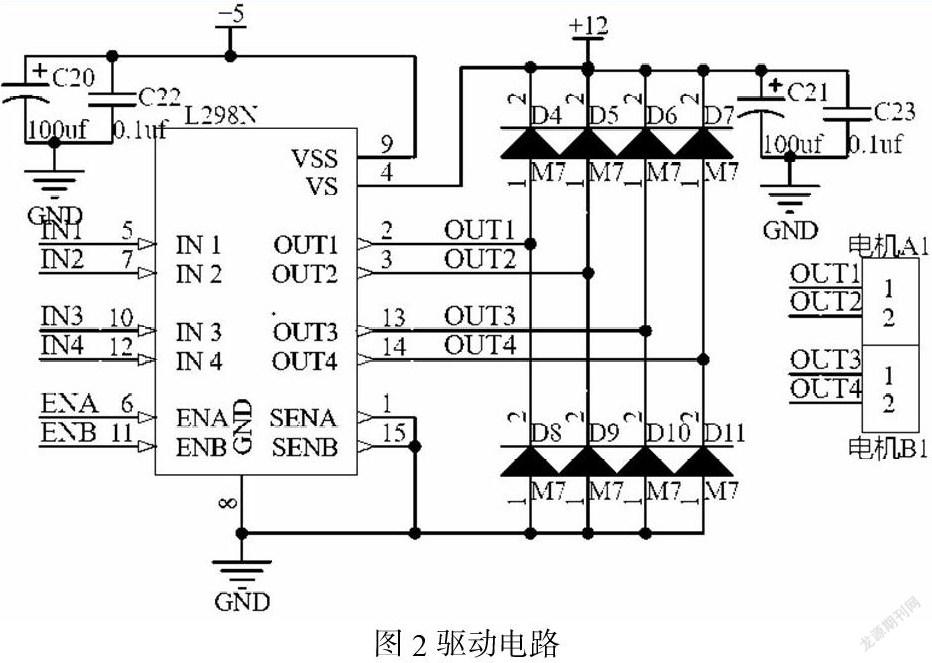
1.1驱动电路
油烟管道清洗机器人的驱动方式主要有:气动驱动、液压驱动、电机驱动三种基本驱动。由于电机驱动具有适用性较强,不受环境温度影响,输出转矩范围广,控制方便,能自由地采用直流、交流、短波、脉冲等各种信号,适于放大、记忆、逻辑判断和计算等工作,可实现超小型化,具有机械自锁性,安装方便,维护检修方便等优点,故选用电机驱动。履带式行走装置通过控制四个直流减速电机的正反转来控制机器人的行进方向,用电机的差速旋转来实现机器人的旋转掉头。驱动电路如图2所示。
1.2行走机构的设计
机器人的行走方式主要有:轮式、步行移动式、履带式、爬行式、蠕动式机器人和游动式。由于油烟管道长期得不到清洗,时间久了就会形成油垢,而履带具有接地比压低,牵引力大,并且此设计加入了永磁性磁铁,通过性和爬坡能力得到了进一步的加强,故选用履带式来作为机器人的行走方式。
1.3两自由度云台的设计
两自由度的云台是用来携带清洗喷头按照一定的运动轨迹来运动,实现对管道四周的油垢进行清洗。云台的搭建采用的是伺服电机,伺服电机具有控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,且具有机电时间常数小、线性度高、始动电压等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。
1.4图像传输系统的设计
图像传输系统使用摄像头电路板与RaspberryPi通过一条15芯的排线进行连接。仅有两个连接座需要连接,排线需要安装到摄像头电路板和RaspberryPi上。您需要正确安装,否则摄像头无法工作。对于摄像头电路板,排线末端的蓝色标记应该背对着电路板。而RaspberryPi部分,藍色标记应该正对着网络接口方向。摄像头是个重要的考虑点,对帧率和分辨率有需求的话,采用CSI接口,图像采集和数据处理通过专门的数据通道和指令,USB摄像头CPU占用率太高。故选用的是CSI摄像头。
2软件系统设计
该系统程序设计部分主要有基于SolidWorks软件三维模型的设计,基于AltiumDesigner软件的电路设计,基于Keil软件的程序设计,系统控制技术路线等。
2.1基于SolidWorks软件三维模型的设计
为保证建模效果使用SolidWorks软件,绘制各部件的零件图。首先建立一个零件,绘制草图,进行相应特征处理,完成零件的绘制,待各部分零部件绘制完毕后进行装配工作,来验证结构设计的可行性,确保实物组装及运行的可靠性。零部件绘制和装配体界面见图3。
2.2基于AltiumDesigner软件的电路设计
使用AltiumDesigner软件进行系统电路原理图和PCB图绘制,进入软件后默认打开的界面为Home界面。在Home界面单击文件工具栏下新建按钮,在右侧的对话框中点击工程按钮,在右侧的对话框中选中PCB工程。进入PCB设计界面,开始设计电路原理图。
电路原理图设计完成后对原理图进行编译,单击工程按钮,在弹出的下拉菜单中点击编译按钮。编译完成后若没有错误则可以将原理图更新到PCB中。点击设计工具栏,在弹出的下拉菜单中点击更新按钮,将原理图更新到PCB中,确定完板子大小后,对PCB版面进行布局和布线,完成后见图4,至此电路板设计完毕。
2.3基于Keil软件的程序设计
油烟管道清洗机器人的程序设计使用C语言编程。C语言工作效率比汇编语言低,但是C语言的开发使用速度快,在于它开发容易,设计自由,指令较多,代码设计方式多样,数据结构丰富多样,包括结构化的操作代码,代码编写自定义,代码的移植率高等特点。但是汇编语言不好去理解,别人也很难读,所以使用率较低。使用C语言程序设计能够有效的缩短开发周期。
Keil通过一个集成开发环境将C编译器、链接器、库管理和一个功能强大的仿真调试器等这些部分组合在一起,组成一个完整的开发系统,运用C语言编程,Keil是最佳选择。用Keil5新建一个基于ARM的工程并保存,就可以进行程序的编写与调试,Keil5的编程界面见图5。
2.4系统控制技术路线
首先将机器人放置在管道的中央,在清洗状态下,CSI摄像头捕捉的画面通过无线连接方式传输到显示器,通过控制无线遥控装置控制喷水杆移动至指定位置,喷出清洁水,清洁毛刷并按照预定动作清洗四个管道壁表面,当清洗一周完成后,云台上的清洗喷头回到初始位置,机器人前进一段距离,云台摆动,再次清洗四个表面,直到云台回到初始位置,如此反复,最终完成整个管道的清洗。系统控制技术路线图如图6所示。
3结论
该机器人结合机械、电子以及计算机技术,通过灵活的上机位控制,以满足清洗油烟管道的需要。尤其是充分利用了云台结构,加大了机器人能够清洗的范围。该作品将机械、电子技术及计算机技术相结合,是一种效率较高、操作灵活、价格低廉的油烟管道清洗机器人。机器人的行进机构采用磁吸附式履带,能够适应不同的油烟管道。采用两自由度云台结构,能够与行进机构相结合,清洗管道内的任何位置。通过机器人自带的影像数据采集机构,传回电脑上机位将影像显示出来,经过分析后,确定所需清洗区域。
本次设计实现的主要任务如下:
(1)简述了投油烟管道清洗机器人在国内外的基本研究现状,并且说明了本设计的研究意义和油烟管道清洗机器人未来的发展趋势。
(2)设计油烟管道清洗机器人结构,特制磁吸附式履带结构,关键机构采用3D打印技术进行零件打造。同时提出了一套以STM32为控制核心,以CSI摄像头作为视觉传输的硬件设计,做出了系统硬件配置的具体结构图和原理图。分析并实現了油烟管道清洗机器人需要实现的各项需求功能,设计出了油烟管道清洗机器人的各硬件部分。
(3)利用KEIL5编程软件完成油烟管道清洗机器人程序的设计编写,从部分到整体,从基本模块调试到最终系统稳定,完成油烟管道清洗机器人的运行调试。
参考文献
[1],一种便于清理的抽油烟机.安徽省,六安中达信息科技有限公司,2019-10-08.
[2]吴湘人.清理油烟管道这笔钱省不得[N].苏州日报,2018-04-04(A06).
[3]成旭,李海港,张立颖.定期清理居民住宅楼的排油烟道排除火灾隐患[J].科技风,2014(20):169+171.
[4]赵燕江,张永德,邹赫莉.基于TRIZ理论的抽油烟机叶片清理机的设计[J].机械设计,2010,27(02):70-73.
作者简介
郑明东(2000-),男,山东省济宁市人,学士,研究方向:电气工程及其自动化。
该项目由国家级创新创业训练项目《油烟管道清洁机器人》(S2021133 20030)支持。
