LiDAR技术在不动产测绘中的应用研究
2021-03-24李俊
李俊




摘要:房地产测绘是测绘领域的一项重要测绘任务。传统测绘采用全站仪、GPS-RTK、卷尺等仪器采集数据,操作效率低、数据采集成本高、周期长。为了提高操作效率,降低数据生产成本,许多学者对摄影测量学进行了深入的研究。
关键词:LiDAR技术;不动产测绘;应用
一、LiDAR技术介绍
激光雷达是激光测距和探测系统的简称,其通常由POS系统、采集管理系统、传感器系统、存储和控制系统组成。POS系统由IMU惯性导航系统和GPS定位系统两部分组成。GPS通过差分技术可以快速、准确地测量传感器在空中的精确位置,而IMU可以准确地测量传感器在空中的姿态。激光束发射到地面,在遇到障碍物后反射回到原来的路径。激光传感器通过记录激光束的返回时间,并结合光速传播的特点,计算传感器与障碍物之间的距离,从而精确测量三维坐标的障碍,以便开展测绘业务。
根据运载方式的不同,激光雷达可分为星载激光雷达、机载激光雷达和地面激光雷达。机载激光雷达一般分为陆地激光雷达和海上激光雷达。海洋激光雷达主要用于测量海底地形,用于一般军事用途。机载激光雷达通常指地面激光雷达,主要用于获取地面结构的三维坐标并渲染成不同的颜色,以便操作人员在采集不同结构时能够准确判断采集对象的类型。
1.机载LiDAR测量。机载LIDAR测量是指将激光雷达安装在固定翼、旋翼等飞行平台上,从空中向地面垂直传输的激光束进行测量。与传统摄影测量相比,激光雷达技术可以快速获取地物三维坐标信息,具有精度高、制图产品丰富等诸多优点。
2.地面LiDAR测量。地面LiDAR测量是采用非接触激光测量方式,利用激光束对扫描物体进行大面积、高速度、高精度、大密度扫描,以点云的形式获取被测目标物的三维坐标及复杂物体三维表面的阵列式几何图形数据。与机载LiDAR测量相比,地面LiIDAR测量可以获得近距离地面结构物的三维坐标,因而操作更灵活,成本更低,且可以获取更丰富、更完整的点云数据。
二、LiDAR技术在不动产测绘中的应用案例
1.机载LiDAR在地籍测绘中的应用案例
(1)测区介绍。调查区域平坦,约有70或80个庭院和零星的房屋。数据采集由配备无人机的激光雷达设备进行。
(2)数据获取。测试区域约1平方公里。采用垂直起降无人机(Vtol),配备激光雷达设备。航向和侧面重叠度分别设置为70%和55%,飞行高度为80米。在地面站软件中,导入测量区域的距离线进行航线规划,并在导航条件下收集点云数据。
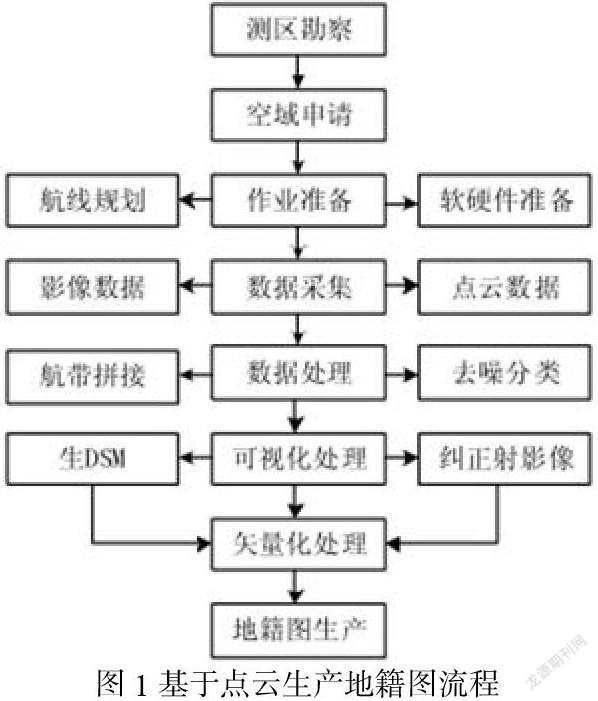
(3)数据处理。数据处理主要是利用控制点对点云数据进行校正,从而获得精度更高的绝对坐标,将点云结果进行拼接处理获得完整的点云结果,时限无重复、无漏洞的数据处理。本次操作使用北京数字绿色地球的LiDAR360软件对原始点云数据进行求解、修正和拼接,并对拼接结果进行滤波和去噪处理。对地籍点、非地籍点和建筑物的点云数据进行分类,为后续地籍图的采集提供依据。基于点云的地籍图生成过程如图1所示。
(4)地籍图采集与编辑。地籍图采集和编辑使用北京清华三维EPS软件,该软件支持三种不同形式的数据源,包括实景三维模型数据、DOM+DEM数据和点云数据。肉眼采集可直接對上述数据源进行采集,采集结果精度高、效率高。本次获得的点云数据格式为LAS,EPS支持的格式为PCD。可以将LAS格式的点云数据直接导入EPS进行格式转换和加载。收集需求模式的结果是2017,EPS中现有的数据库模板是2007模式,所以房屋是按照2007模式收集的。在收集的过程中,属性直接分配给确定属性的房子。采集完成后,将采集结果导出为DWG格式的矢量数据,装入CASS10.1。将2007年的方案转换为2017年的方案,并按照集合要求对结果进行编辑,确保最终结果的图纸面满足规范要求。
(5)精度检查与统计。本次精度检查主要检查两方面内容,即坐标绝对精度和房屋边长精度。利用全站仪采集了23个房角点,利用同精度中误差计算公式(见式1),对23个房角点的精度进行计算统计。
其中M为中误差,n为检测点个数。△x和△y分别为在X方向和Y方向的较差。
利用卷尺量测了15条边长,用来检测房屋的边长精度,具体的检测结果见图2和表1。
通过图2可以看出,23个检测点中,在X方向和Y方向较差,均小于5cm,在DS(平面直线距离)方向上较差最大为6cm,且多数检测点较差小于5cm,最后统计得到中值误差为4.8cm,符合地籍规范二级精度需求,成果绝对坐标精度高。通过表1可以看出,15条边长检测结果中,最大残差为5.6cm,最小残差仅为1.9厘米,平均值为3.9cm,精度完全符合地籍规范要求。通过实际案例可知,采用机载LIDAR方式生产的地籍图,精度可以符合地籍规范要求,且精度分布均匀,符合正态分布成果,可用性强。
2.地面LIDAR在地籍测绘中的应用案例
(1)测区介绍。测区位于城区边缘,房屋分布密集,不宜采用机载LIDAR方式生产。结合地形和房屋分布特点,采用GeoSLAM手持移动扫描仪进行房屋数据采集。
(2)数据获取。通过携带手持移动扫描仪SLAM,在测区的每个巷道匀速步行,获取巷道两侧密集点云数据,通过交叉方式行走,确保采集数据完整,获取高质量的点云数据。
(3)数据处理。根据测量区域内巷道的分布布置合理数量的控制点,通过全站仪采集控制点坐标。第一次使用控制点,点云数据为每个车站,正确得到高精度点云,然后导致不同的网站,得到完整的结果,然后使用LIDAR360一系列的数据处理,包括地面点分类,分类的噪音、建筑分类等,不同层次的数据对应有不同的特征。对于孔洞区域,采用点云插值来补充和改善脆弱性区域。
(4)地籍图采集与编辑。将点云结果导入EPS软件,EPS自动转换格式并加载点云数据,然后按照地籍图采集规范的要求在点云数据上采集地籍图。然后将收集到的结果导出为DWG格式,并加载到CASS10.1中进行2007模式到2017模式的转换。利用中国社会科学院自身的质量检测模块对地籍图结果进行检测,以确保数据结果的可用性。
(5)精度检查与统计。精度检查主要检查两个方面,即坐标绝对精度和房子边长的精度。采用全站仪采集16个角点,用公式(1)检验结果的绝对坐标精度。用卷尺测量10个边长,以测试房屋边长的准确性。具体测试结果如图3和表2所示。
通过图3可以看出,16个检测点中,最大残差小于5cm,最小残差仅为2.5cm,中值误差为3.5cm,分析图2和图3可知,较机载LiDAR方式而言,地面LiDAR方式生成的地籍图成果精度更高。通过表1可以看出,10条边长检测结果中,最大残差为3.1cm,最小残差仅为1.6厘米,平均值为2.4cm,精度完全符合地籍规范要求。对比表1和表2可知,地面LiDAR方式生产的地籍图精度较机载LiDAR方式生产的地籍图精度更高。机载LiDAR从空中进行作业,较地面LiDAR而言,其效率更高,适合大面积任务区作业,但是受空域限制,在进行作业时,需要获取空域点云数据。
结束语
传统的房地产测绘方法效率低、成本高、周期长。为了解决上述问题,本文提出利用激光雷达技术进行数据采集,利用专业软件LiDAR360进行数据处理,利用EPS进行地籍图采集,利用检测点对地籍图精度进行统计分析。结果表明,采用机载激光雷达和地面激光雷达技术制作的地籍图能够满足地籍规范的要求,具有效率高、成本低、周期短等优点,具有一定的实用性和参考意义。
参考文献
[1]贾秋英.无人机倾斜摄影测量技术在地籍测绘项目中的应用[J].科学技术创新,2021(19):35-36.
[2]马婷.无人机倾斜摄影测量在房地一体项目中的应用研究[J].科学技术创新,2021(13):27-28.
[3]魏军,曹琴.基于倾斜摄影采集立面图方法的研究[J].数字技术与应用,2020,38(1):46+48.
