基于无线传感网络的机器人竞赛裁判系统设计
2021-03-23王洪阳
王 旭,王洪阳
(1.北京科技大学工程训练中心,北京 100083;2.北京深蓝智能机器人研究院,北京 100083)
0 引言
近年来,各类机器人竞赛层出不穷。机器人的比赛形式大致分为两种:任务型和竞技型。其中竞技型赛事因其高综合性的机器人技术、丰富的机器人类型、激烈的对抗形式、多变的比赛场景吸引了越来越多的高校参与其中,参赛学生需要在技术实现、策略配合和团队协作等方面进行综合竞技。
为增加竞技赛的趣味性,竞技赛规则的得分形式多采用电子竞技游戏中“攻击减血”模式,比赛中通过有效击打对方机器人实现减血功能。场上比赛机器人数量多,得分点分散,需要一个自动裁判系统,能够实时感知场上所有机器人的状态、位置信息,并同时记录、统计、显示双方机器人的得分情况,以减少人工裁判的误判、漏判现象,更好地实现比赛的公平性与观赏性。
1 功能分析
裁判系统的设计需求基于全国大学生机器人大赛ROBOTAC比赛。比赛规则要求参赛双方的轮式机器人、高地上的堡垒安装有击打感知模块,具有“被攻击减血”“击毁断电”功能;所有机器人装有全场定位模块,用于机器人之间、机器人与场地道具之间的位置检测;同时要求机器人和场地道具的所处状态、比赛时间、得分情况能够实时显示在比赛现场的大屏幕和直播画面上。基于以上要求,所设计的竞赛裁判系统分为:击打感知、全场定位、数据传输和裁判系统上位机等模块。
击打感知模块:安装在轮式机器人及堡垒上,用以有效检测机器人或堡垒受到的击打,击打感知范围在5~16g(g=9.8 m/s2);
全场定位模块:安装在机器人上,能够实现比赛场地上150 m2范围内平面坐标的定位,通过检测机器人之间或机器人与场地道具间的相对距离,根据规则赋予机器人具有特殊功能,定位精度要求在15 cm以内;
数据传输模块:将场上机器人和堡垒的实时状态信息,以无线方式传输给裁判系统,要求通讯稳定、采样周期小于10 ms,延迟时间小于200 ms;
裁判系统上位机:收集场上各单元状态信息,客户端实时显示、自动计时、自动判定比赛胜负。
2 系统设计
2.1 击打感知
测量击打力,一般选用压力传感器或加速度传感器两种方案,通过预先设置阈值,提取有效击打力产生的电信号,判断是否受到有效打击。由于ROBOTAC比赛中机器人的对抗是机器人的执行机构直接物理接触,需要检测机器人整体受到的击打力,因此选用加速度传感器方案来检测击打力。
2017年,我国甘薯总产量7 057.1万t,按照55%的加工比例和20%的产品原料比,当年我国甘薯加工品产量约为780万t.戴起伟等[5]估算结果显示,当前我国国内甘薯加工产品消费量约在500万t以上,因此,粗略估算,我国甘薯加工品的年出口水平应在200~280万t之间.
3 轴ADXL345 数字加速计,具有尺寸小(3 mm×5 mm×1 mm,LGA封装)、分辨率高(最高13 bit)、量程可变、灵敏度高(最高3.9 mg/LSB)且内部有多种运动状态检测和灵活的中断方式等特性,支持标准的I2C或SPI 数字接口,自带32 级FIFO 存储。选用STM32F103C8T6 嵌入式微控制器作为主控芯片进行信号的采集和处理,并对处理后的数据进行判断是否满足被有效击打条件。
设计电路原理如图1 所示。

图1 ADXL345数字加速度计和微控制器电路原理图
机器人受到有效击打后的所处状态,通过可编程控制的LED灯组显示,在受到3 次有效击打后通过控制大功率MOS 管控制机器人的电源通断。由于采用3.3 V低电压信号控制12 V电源信号,所以控制信号使用光耦器件隔离,并在LED驱动端用三极管做开关来控制LED驱动电流的通断电。LED 灯和电源控制电路原理图如图2 所示。

图2 LED灯和MOS管控制电路原理图
2.2 全场定位
室内定位技术涉及陀螺仪+码盘、激光雷达、视觉、到达时间差(Time Difference of Arrival,TDOA)等。结合本系统开发需求,采用基于TDOA 原理的超宽带(Ultra Wide Band,UWB)技术方案。UWB技术具有系统复杂度低,对信道衰落不敏感,定位精度高等优点,适用于室内场景的高速无线接入。
通过3 个基站可检查到两组TDOA,即可确定被测点的坐标。由于比赛场地是室内正方形区域,并且高度变化可以忽略不计,采用二维定位的方式在场地的4 个角落放置各放置一个基站,即可测得场地内机器人精确的位置信息。基于TDOA的定位原理如图3所示。
本方案UWB定位模块基于DWM1000 芯片开发,DW1000 芯片集成了天线,尺寸小巧,定位精度为10 cm,数据传输速率6.8 Mb/s,通信距离300 m,在20 m半径内,标签的密度可以有1.1 ×104个。

图3 基于TDOA的定位原理示意图
数据处理与交换选用STM32F103C8T6 微控制器,距离测量数据结果通过串口和击打感应装置进行通信。定位模块电路原理如图4 所示。

图4 基于DWM1000的全场定位模块电路原理图
2.3 数据传输模块
数据的实时传输采用无线通信方式,常见的无线传感网络通信方式有WiFi,蓝牙和Zigbee。表1 为3种无线方式的特性对比。
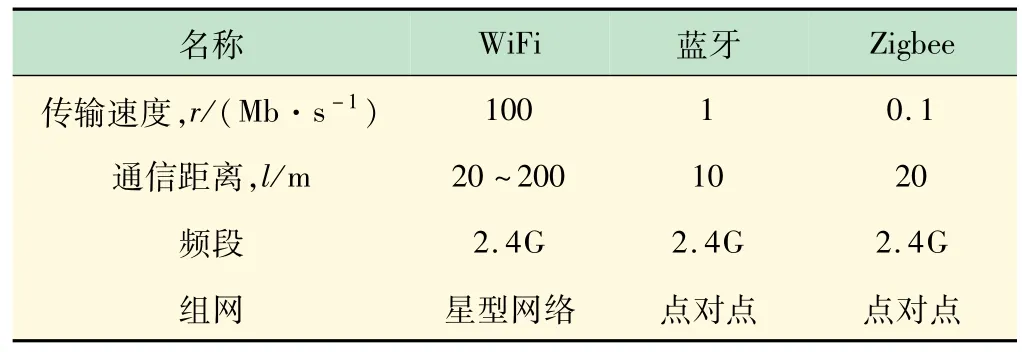
表1 无线通信方式特性对比表
设计采用了超小尺寸的USR-C215 超低功耗串口转WiFi模块,该WiFi 模块硬件上集成了MAC、基频芯片、射频收发单元以及功率放大器;支持WiFi协议,可实现UART设备的联网功能。数据传输模块电路原理如图5 所示。

图5 数据传输模块电路原理图
由于比赛中每次的传输数据量较小,要求低延时,因此采用用户数据报协议(User Datagram Protocol,UDP)进行数据传输。UDP 发送数据前不需要建立连接,提供最大努力的交付,实时性强,网络中的拥塞不会影响主机的发送速率。本设计UDP 数据格式包含了帧头、帧尾、设备号、红蓝分组等13 个Byte,具体信息如表2 所示。

表2 裁判系统数据传输UDP协议数据格式
2.4 裁判系统上位机
裁判系统的上位机具有3 个功能:通信配置、比赛控制、屏幕显示。
(1)通信配置。在通信配置界面可以配置WiFi通讯的方式UDP通信,通信的IP地址和端口号(见图6)。
(2)比赛控制。比赛控制界面可以实现比赛类型和手动加减分、选择配置学校名称、选择道具的组别、控制投影显示等功能,如图7 所示。
(3)屏幕显示。比赛现场大屏幕显示比赛信息,包括比赛时间、队伍名称、比赛得分、对阵双方的机器人的击打感应装置的受打击次数等信息,如图8 所示。

图6 上位机通信配置界面

图7 比赛控制界面
3 系统功能与分析
3.1 击打感知模块
比赛中使用的机器人传感单元电路集成了击打感知、全场定位、数据传输3 个模块,控制电路板实物如图8 所示。
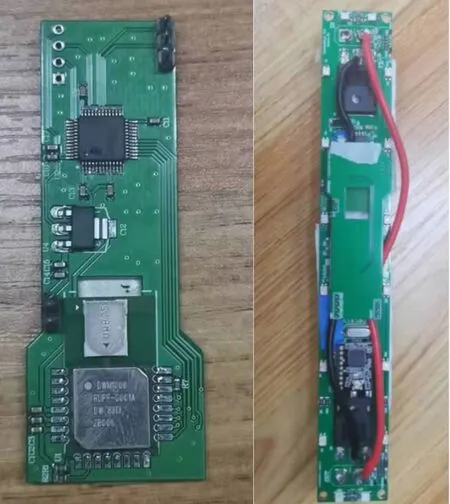
图8 机器人传感单元控制电路板
为在比赛中快速换装不同场次的机器人传感单元,外壳设计有快速拆卸的接口和底座。电源接口采用了XT60,装置主机和从机之间的互联接口采用了10 pin 牛角座。机器人传感单元外壳设计图如图9所示。

图9 机器人传感单元外壳设计图
3.2 击打感知信号处理算法
机器人正常运动和受到击打时产生不同的加速信号,可以通过采集信号变化判断机器人是否受到有效击打。
信号处理算法流程图如图10 所示。

图10 基础信号提取流程图
这种算法可以有效检测到击打但是容易在机器人快速加减速或碰撞场地围栏等状态下做出误判。通过测试发现正常被打击时,ERR 变化的斜率很大,而且回复速度很快。当机器人掉下场地中的高地或撞到场地固定道具时,ERR变化的斜率较缓,且会持续震荡,回复速度较慢。根据这个现象修改了信号的提取算法流程图如图11。

图11 改进后信号提取流程图
改进后的算法可以明显过滤掉机器人在场地上跌落和撞击场地道具产生的误判,提高了比赛中的击打有效检测识别率。
不同状态下的加速计信号如图12 所示。

图12 不同状态下加速计信号图
通过信号分析可见,基本信号特征的提取算法只包含纵轴的幅值特征,设定幅值的阈值大小之后在撞击围栏、台阶跌落这两种不应触发有效打击的状态下,也会因为算法判定为有效打击。对基础信号特征提取算法进行改进,加入对纵轴时间的判断,设定时间阈值范围。这样就可以剔除撞击围栏和台阶跌落的长时间回复信号,同时剔除信号跳变造成的个别异常数据。
4 结语
该裁判系统满足了当前竞技型机器人比赛的裁判使用需求,实现了比赛中各机器人和比赛道具状态通过无线方式与裁判系统实时通信,具有显示比分和自动判罚的功能,减少人工裁判的误判、漏判现象,有效提高比赛的公平性与观赏性。
