基于LabVIEW的风力机叶片振动特性与控制实验系统
2021-03-23李迺璐江文宇朱卫军曹九发
李迺璐,江文宇,杨 华,朱卫军,曹九发
(扬州大学电气与能源动力工程学院,江苏扬州 225127)
0 引言
近年,风电装机容量不断提升,风电产业处于蓬勃发展的阶段[1-2]。面向市场需要,高等院校工科专业,如新能源科学与工程专业、电气专业和自控专业等开始新增风电相关的理论与实践教学环节。风电科研与教学容易受到场地、设备成本等限制[3-4],同时,风力机动力学理论较为复杂。在实践教学过程中需要专业、直观且可交互的实验系统,帮助学生深化理论认识,提高风电实践能力,为工科师生提供高效、低成本的风电实验手段。
在风电系统中,风力机叶片是捕获风能、保证风力机安全稳定运行的关键部件。随着大型化、柔性化叶片的发展,风力机叶片在流固耦合作用下易发生振动,严重时可导致叶片断裂,甚至毁坏整个风力机。风力机叶片振动特性与控制是在工业应用中非常值得研究与关注的一个问题[5-8]。自然界中风速存在多种变化特征,研究不同风况下的叶片振动,有助于深入观察并理解实际工况下的风力机叶片振动特性;在此基础上,利用控制理论进行叶片振动控制研究,有利于减缓叶片振动、提高叶片及风力机的可靠性,提高风力发电效率、避免灾难性事故。随着这些问题的日益突出,学术界和工业界都在积极开展风力机叶片振动特性与控制的研究。
为了契合学术界和工业界的研究热点,并满足高校师生的实践教学需要,本文利用虚拟仪器软件LabVIEW[9-10]设计开发了风力机叶片振动特性与控制仿真系统,为学生的风电实践教学提供了一个平台。通过仿真,向学生展示了风力机叶片振动系统,直观呈现了风况变化对叶片振动特性的影响,同时,学生可自主设计控制器参数进行叶片振动控制仿真。这有利于培养学生的风电科学素养和实践创新能力,并为风电实验教学提供了有效、可推广的仿真实验平台。
1 风力机叶片振动系统
1.1 叶片翼型的振动运动方程
叶片翼型的振动运动方程为[11]:
式中:m为翼型质量;b 为翼型半弦长;Iθ为弹性轴的转动惯量;xθb为质心与弹性轴的距离;ch、cθ为阻尼系数;kh、kθ为刚度系数;L、M 分别为气动升力和气动力矩;h为挥舞位移;θ为扭转角为挥舞速度和扭转角速度;分别为挥舞加速度和扭转角加速度。
考虑自然来流和流动控制装置的影响,式(1)中的气动力包括翼型气动力和尾缘襟翼的气动控制力:

式中:L1、M1分别为翼型的气动力和气动力矩;L2、M2分别为尾缘襟翼的气动力和气动力矩;U为风速;β 为尾缘襟翼角。
采用准稳态气动模型来描述气动力和气动力矩[12]:
式中:ρ为空气密度;a 为弦长中点和弹性轴之间的无量纲距离;clθ、cmθ分别为翼型气动升力系数和气动力矩系数,clβ、cmβ分别为尾缘襟翼的气动升力系数和气动力矩系数。
将尾缘襟翼角作为系统控制量u,将扭转角作为系统输出量y。整理式(1)~(4),风力机叶片振动系统可表示为:

由以上各式可知,叶片二自由度运动模型为耦合振动系统,选择扭转角作为系统输出量,使得整个系统成为单输入单输出系统。
1.2 典型风况模拟方程
式(5)中风速为影响叶片振动的重要参数。典型风况一般包括基本风、阵风、渐变风和随机风[12],实际风况是由其中一种或几种典型风况组合而成。
(1)基本风vwb。基本风在风力机正常运行中一直存在,反映了风电场的平均风速变化,通常取常数:

式中,Kb表示常数。
(2)阵风vwg。阵风具有短时间突变性,具有余弦特征。阵风可表示为:

式中:Gmax为阵风峰值;Tg为阵风周期;T1g为阵风起始时间;t为时间。
(3)渐变风速vwr。渐变风通常用来描述缓慢变化的风速:
式中:Rmax为渐变风最大值;T1r为风速变化的起始时间;T2r为风速变化的结束时间;Tr为最大值保持时间。
(4)随机风vn。自然界中来流风普遍存在随机性,采用随机分量表示:

式中:max(vn)表示随机风的最大值;Ram为-1 和1 之间均匀分布的随机数;ωv、φv分别为风速波动的平均距离和随机量。
2 叶片振动控制
为实现风力机叶片振动控制,需要进行振动控制器设计。利用经典PID 控制理论进行控制器设计;为更好地适应风况变化,采用自适应控制理论进行控制器设计。振动控制的目标是实现挥舞位移和扭转角的振动抑制,根据式(5)系统,扭转角被认为是可实现控制目标的有效传感器信号。
2.1 叶片PID振动控制器
PID控制是较为常见的控制方法[13-14],应用于叶片振动控制具有结构简单、实用性强、具有鲁棒性等优点,商业风力机也较多采用PID 控制方法。PID 给定控制器表达为:

式中:e(t)为系统误差;r(t)为给定值;Kp、Ki、Kd分别为比例、积分和微分控制参数。这些参数决定PID 控制效果,比例控制可快速减小误差,让系统输出接近给定值,但会存在稳态误差;积分控制主要用来消除静态误差;微分控制能预测误差变化趋势,提前对误差进行抑制。这些综合作用实现控制目标并获取良好的动态效果。
根据式(10),叶片PID振动控制器可表达为:

选取合适的PID控制参数可实现叶片振动抑制。
2.2 叶片自适应振动控制器
风况具有多变性,为叶片振动控制系统来带扰动,需要具有抗干扰的控制方法来实现叶片振动抑制。叶片振动系统的状态量在实际情况下难以精确测量或精确估计,需要研究不依赖多变量测量的抗干扰输出反馈控制器,如自适应性控制器[15-16]。
控制目标为抑制叶片振动,并消除风扰动影响。叶片的自适应振动控制器设计为:

式中:Ge(t)为克服系统误差的自适应增益;Gd(t)为抗扰动的自适应增益;ud(t)为扰动信号:

式中,zd(t)为扰动信号的状态量,φd(t)为扰动状态量的基本函数,Θ、L分别为幅值。
根据式(12)、(13),自适应增益为:

式中:r1、r2分别为自适应增益参数,即自适应振动控制参数。可见,随着扰动信号的变化、系统误差信号的变化,自适应增益可进行在线调节,本质为时变增益,可更好地适应系统参数的变化和干扰影响。
3 仿真系统
3.1 系统总体结构
本仿真系统包括系统主界面、风力机叶片振动特性仿真、叶片PID振动控制仿真以及叶片自适应振动控制仿真,总体结构如图1 所示。通过LabVIEW虚拟仪器软件,设计开发仿真实验系统的主界面和每个子界面,通过LabVIEW编程实现仿真系统的程序设计。在系统功能方面,采用人机交互方式,学生可在系统中自行设置不同类型的风况、调节控制参数,观察和分析多种风况下风力机叶片的振动特性、PID 控制参数和自适应控制参数对叶片振动抑制的效果和抗干扰作用。所有子界面通过主界面连接进入,界面设计通过LabVIEW前面板完成、程序设计和功能设计在LabVIEW后程序框图完成。

图1 仿真系统总体结构图
3.2 系统程序
本文主要采用了LabVIEW 基础软件、LabVIEW Control Design and Simulation(CDS)功能模块和Mathscript功能模块等完成系统的程序设计。仿真系统,主要针对多种典型风况、风力机叶片振动系统、PID 控制器和自适应控制器进行了LabVIEW 程序开发。
采用LabVIEW CDS模块的控制与仿真循环程序框来建立叶片振动系统的微分方程模型,利用Mathscript功能模进行系统参数设置;利用Mathscript建立组合风况模型,并设计风况参数的人机交互功能;风况模型的输入直接连接叶片振动系统,对振动特性直接产生影响;利用LabVIEW CDS模块编写PID控制器和自适应控制器模型,设计控制参数的人机交互功能。具体的系统仿真程序如图2 所示。
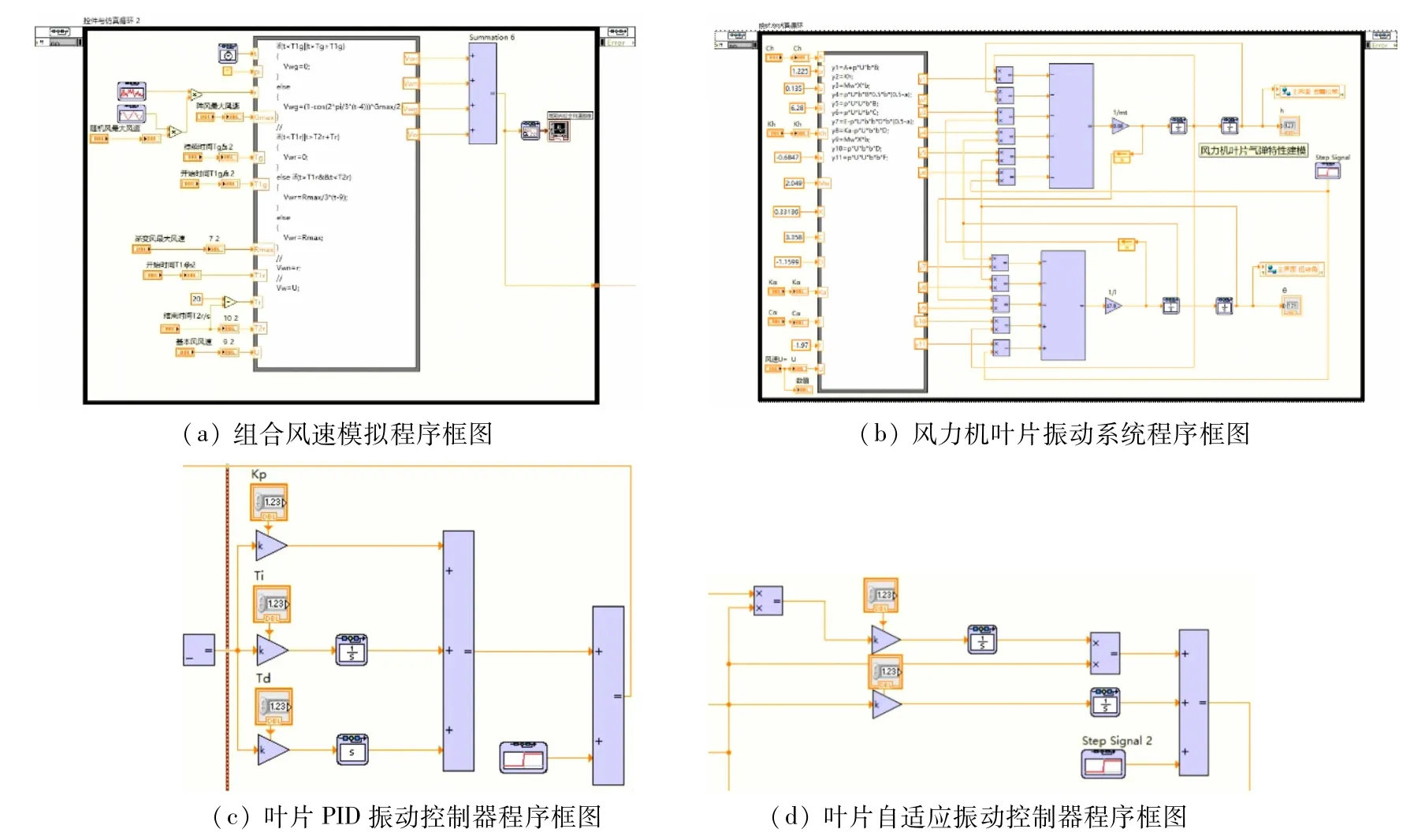
图2 基于LabVIEW的风力机叶片振动特性与控制仿真程序框图
4 风力机叶片振动特性与控制仿真
(1)系统主界面。仿真系统的主界面如图3 所示,在主界面上部分,清晰、直观地展示了风况变化、叶片翼型两自由度振动量和三维风力机等,具有良好的人机界面;在主界面下部分,直观展示了叶片振动控制的闭环回路、控制量和控制方法;设置有3 个按钮,可打开对应的子界面进行仿真。主界面总体上显示了风力机叶片振动与控制系统的工作原理。

图3 风力机叶片振动特性与控制仿真系统主界面
(2)不同风况下叶片振动特性仿真。根据界面参考数据分别设置基本风、阵风、渐变风和随机风的参数,形成单个典型风况或任意组合风况。根据风况设置,界面实时更新显示风况下的叶片振动响应曲线。为模拟基本风、阵风、渐变风和随机风的复杂风况,设置基本风、阵风分别为8 m/s,开始时间为4 s,持续时间为3 s;渐变风为6 m/s、开始时间为9 s、结束时间为12 s;随机风为2 m/s。实时运行结果如图4 所示。可见,叶片振动响应随风况变化而变化,较小的基本风和随机风带来可衰减的振动,阵风可在短时间内显著增大振动幅值,当渐变风超过了颤振风速会导致叶片产生不稳定的振动。图5 所示为不同风工况下的叶片振动特性。

图4 风机叶片振动特性仿真实验界面

图5 不同风况下叶片振动特性
由图5 可发现:①阵风短时间内影响叶片振动并造成大幅波动,阵风过后叶片振动可衰减;②渐变风由于风速持续变化且不断增大,会长时间影响叶片振动特性,在达到颤振速度后使得叶片振动失稳;③低于颤振速度的随机风和基本风会引起叶片衰减振荡,但不影响叶片稳定性。综上不同类型风速对叶片振动的影响程度:渐变风>阵风>随机风>基本风。
(3)叶片PID 振动控制仿真。图6 显示了叶片PID振动控制设计与仿真结果。界面清晰地展示了PID控制原理和振动控制结构,直观给出了PID 参数按钮。学生可以自主调节控制参数并完成叶片PID振动控制器的设计。在界面中,可以实时观测当前风况、PID振动控制结果和控制前后对比结果。在阵风情况下,PID振动控制器可以有效抑制叶片振动并降低振动幅度,但在5~6 s区间PID控制系统无法克服阵风干扰的影响。
(4)叶片自适应振动控制仿真。为了进一步克服风况变化带来的干扰影响,进行叶片自适应振动控制仿真,结果如图7 所示。图7 直观展示了叶片自适应振动控制结构以及自适应控制优势。图7 中,学生可通过自适应参数调节按钮在线调整控制参数,并实时观察叶片振动控制效果。设置最复杂的组合风况,可发现自适应控制器不仅可以有效抑制叶片衰减振荡和叶片发散振荡,同时成功克服了阵风和渐变风干扰,所设计自适应振动控制系统具有较强的稳定性、抗干扰性和鲁棒性。
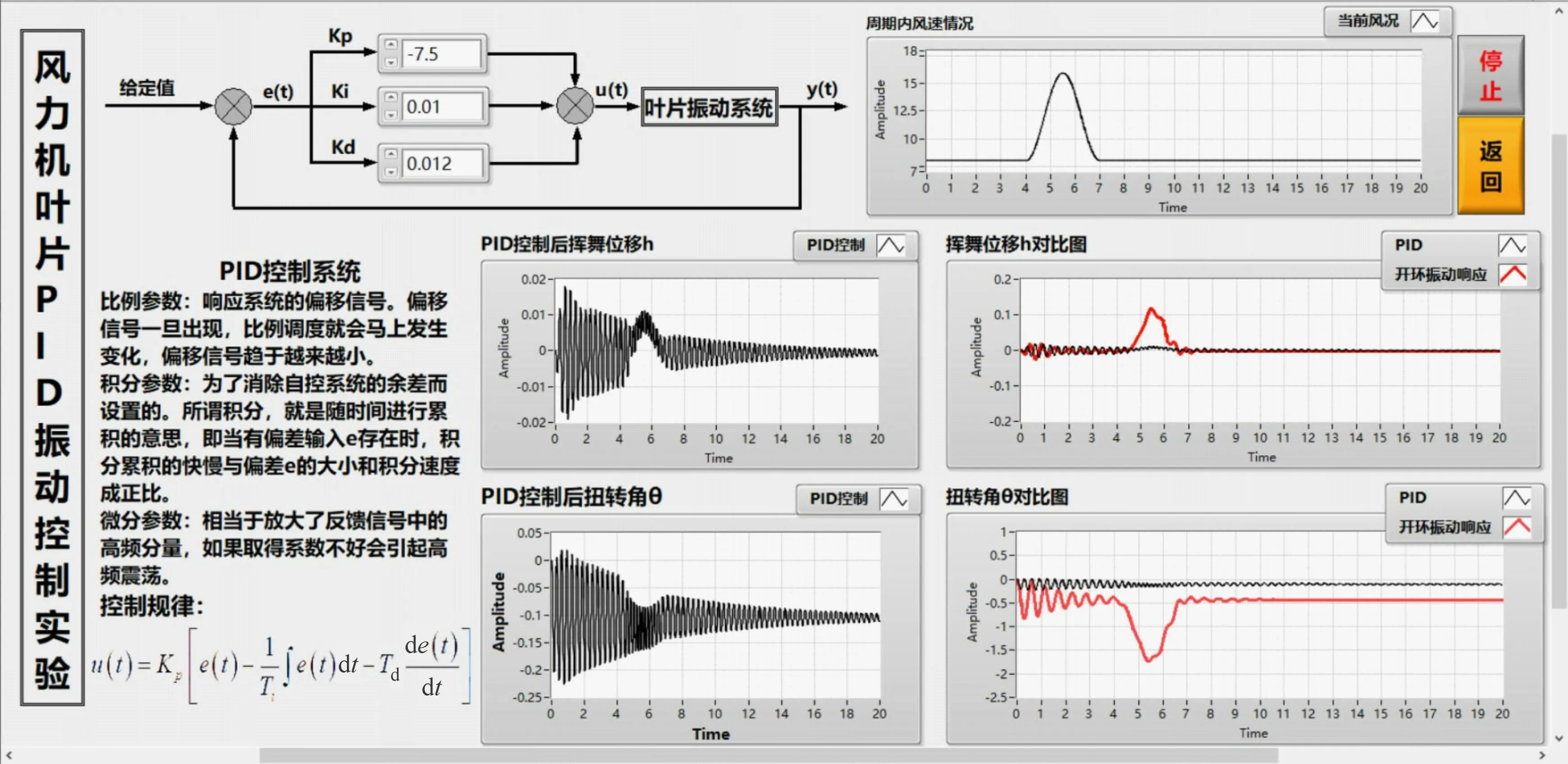
图6 叶片PID振动控制参数设置与仿真实验界面

图7 叶片自适应振动控制参数设置与仿真实验界面
5 结语
本文设计了基于LabVIEW 的风力机叶片振动特性与控制仿真系统,来研究不同类型风况下的叶片振动特性、通过学生自主进行控制设计,研究分析PID控制器的叶片振动抑制效果以及自适应控制器的振动抑制和抗干扰性能。该仿真系统有助于学生理解和掌握复杂的风力机动力学与控制原理,激发学生的学习热情和主动性,为相关专业的风电实验教学与研究提供了一个低成本、可推广且具有交互性的实验平台。
