机械原理课程设计中机器人机构的动力学建模与仿真
2021-03-23陈修龙陈天祥
陈修龙,陈天祥
(山东科技大学机械电子工程学院,山东青岛 266590)
0 引言
机械原理课程设计是培养学生机构分析能力的重要环节,但传统课程设计主要针对平面连杆机构的运动学进行分析,动力学分析的较少,特别是课程设计中对机器人机构动力学分析还很鲜见。作为重要应用机构类型之一的机器人机构受到了广大企业和科研院所的关注[1-3],在机械原理课程设计中增加机器人机构动力学的内容,不但能满足有较好课程基础和分析能力学生的需要,提高学生的学习兴趣,拓展思路,而且能做好校内学习内容与校外需求的统一,为学生分析能力的培养和就业都具有重要的作用。
平面3 自由度并联机构是机器人机构的重要分支,其结构简单,制造成本低,在芯片封装及电路板精密切割等领域具有较广的应用,已逐渐成为国内外研究热点[4-8]。并联机器人机构动力学建模分析是动力学性能评价、精确控制和优化设计的基础[9-14],也是机器人机构工程应用的理论依据。Hamdoun 等[15]研究了3-RRR并联机器人的逆运动学问题,并进行了优化设计研究;马立等[16]建立了3-PRR平台的伪刚体模型及对其进行位姿分析,获得了平台的正、逆解;Mo等[17]、杨杰等[18]对平面3-RRR 和3PRR 并联平台进行了运动学建模和运动控制研究;Can 等[19]研究了平面3-RRR 并联机构3 个曲柄在不同方向旋转时的奇异位姿。Lipiński[20]研究了基于RRR平台并联机器人复杂机电一体化系统的动力学问题;赵磊等[21]建立了3-RRR柔顺并联机构的伪刚体模型,并采用矢量代数法理论推导了该机构的位姿正解;张东胜等[22]基于(2PRR)~2 +R 3 自由度平面并联机构构造了一种新型5 自由度串并混联机器人并对其并联部分进行了运动学分析,推导出冗余和非冗余驱动并联机构刚度矩阵和机构固有频率方程;陈修龙等[23]对3-PRR并联机器人机构进行了运动学建模与分析,并研究了其工作空间及运动学特性;Özgür 等[24]提出了一种用于并联机器人运动学和动力学建模的线性方法;朱大昌等[25]采用优化准则算法,结合矢量同构映射方程,对3-PRR型平面3 自由度全柔顺并联机构进行了同构构型设计;Li 等[26]研究了冗余驱动平面旋转并联机构(RAPRPMS)通过改变内力来调节机器人刚度的设计方法;邹琦等[27]提出了一种新型的具有无穷对称位置的平面3 自由度可重构并联机构,利用闭环矢量方程进行正逆运动学分析,通过遗传算法进行杆件优化。
本文在机械原理课程设计中对3-移动副-转动副-转动副(3-prismatic pair-rotating pair-rotating pair,3-PRR)平面并联机器人机构刚体动力学进行研究,建立机构的运动学反解数学模型,基于第2 类拉格朗日方程进行逆动力学建模与分析,求出各个驱动关节上的驱动力,结合Adams仿真结果进行对比验证。
1 3-PRR并联机器人机构介绍
如图1 所示,3-PRR 并联机器人机构具有三条对称的PRR支链,机构整体主要由7 个活动构件,6 个转动副和3 个移动副构成,每条支链上的滑块底部与定平台通过移动副连接,滑块上部与从动连杆通过转动副连接,从动连杆的另一端与动平台转动连接。通过自由度计算公式可知,3-PRR 并联机器人机构的自由度为3,具有平面内2 个移动1 个转动共3 个自由度。
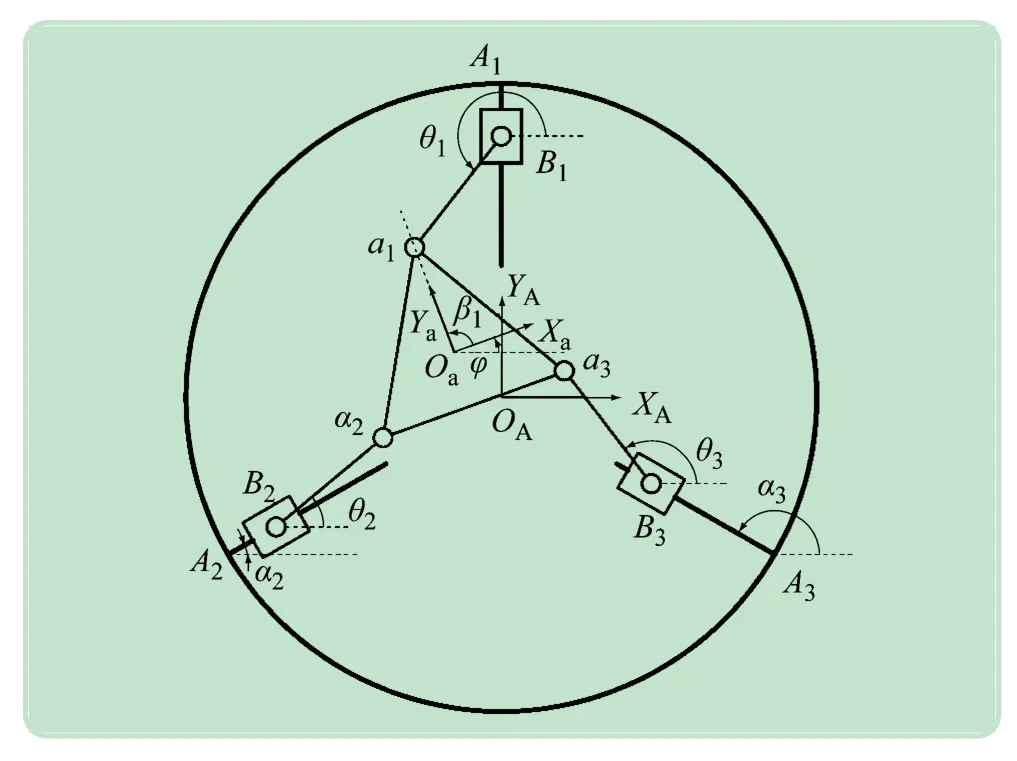
图1 3-PRR并联机器人机构模型简图
如图1 所示,3-PRR 并联机构主要包含1 个定平台A1A2A3,1个动平台a1a2a3,3个滑块Bi,3个从动杆Biai,其中AiBi为固定在定平台上的3 个滑动导轨,Bi和ai处为平面转动轴承。全局坐标系为OA-XAYA,原点OA为等边三角形A1A2A3的中心,XA 轴沿A2A3方向;动平台局部坐标系为Oa-XaYa,原点Oa为等边三角形a1a2a3的中心,Xa轴沿a2a3方向。
2 3-PRR并联机构运动学反解建模
2.1 位置分析
对于第i条支链(i=1~3),滑块Bi的中心与点Ai之间的距离为li,从动连杆Biai的杆长为Si,动平台a1a2a3的外接圆半径为r,定平台A1A2A3的外接圆半径为R。其中li和Si与全局坐标系XA 轴的夹角分别为αi和θi,且li指向定平台中心OA,Oaai与动平台局部坐标系的Xa轴的夹角为βi。动平台中心Oa的坐标在全局坐标系下为
式中:x、y分别为动平台中心的全局坐标;φ为动平台局部坐标系相对全局坐标系的旋转角度。
对于支链i,建立运动学反解方程如下:

式中:AxAi=Rcos αi;AyAi=Rsin αi;Axai=x+rcos (βi+φ);Ayai=y+rsin (βi+φ)。
2.2 速度分析
将运动学方程(1)对时间求一次导数,得到速度反解方程如下:

将方程(2)写成矩阵形式:

2.3 加速度分析
速度反解方程(3)对时间求一次导数,得到加速度反解方程:

3 基于拉格朗日方程的动力学建模分析
动力学模型描述了并联机构末端运动和各个驱动关节力传递关系。在机构设计阶段,逆动力学建模分析对电动机选型、能耗分析和轨迹规划等具有重要指导意义。本文使用第2 类拉格朗日方程对3-PRR 并联机器人机构进行逆动力学建模分析。
3.1 构件质心坐标
在不考虑摩擦力、黏滞阻力等因素影响,只考虑机构本身的力传递关系前提下建立刚体逆动力学模型。根据图1 的坐标描述,可定义各个构件的质心坐标,其中滑块的质心坐标为(AXli,AYli),从动杆的质心坐标为(AXSi,AYSi),动平台的质心坐标为(x,y),分析可得:

3.2 构件质心速度
对构件的质心坐标求导可得各构件的质心速度,滑块的质心速度,从动杆的质心速度为),动平台的质心速度。滑块和从动杆的质心速度可以表示为:

3.3 系统动能
系统的总动能T 分别包括3 个滑块的动能Tli,3个从动连杆的动能TSi和动平台的动能T0。整理可得系统的总动能为:

经整理可得系统的动能:

3.4 等效广义力
并联机器人机构为一个非保守系统,由非保守系统的拉格朗日方程可知,方程式等号右边的Qi即为非保守力,作用于其上的非保守力主要包括驱动力、生产阻力和耗散力等。最主要的耗散力为摩擦阻力,由于系统的摩擦力相对于驱动力和生产阻力而言很小,所以为了简化动力学模型,可以不考虑耗散力的影响,只计算驱动力和生产阻力产生的影响。
机构的3 个驱动关节为移动副,设3 个滑块的驱动力分别为Fdi,机构所受外力负载全部等效作用于动坐标系的原点,将其转换到定坐标系中表示为f。
由虚功原理可知,

式中:δ W′为虚功之和;δ qi为广义虚位移;Qdi=为驱动力所对应的广义力;为外力负载所对应的广义力;f=[fxfyMf]T为外力负载。
3.5 系统的拉格朗日方程
选择动平台所在的平面为零势能面,机构在平面系统内没有重力做功,由于系统中所有运动副都属于理想约束,所以平面3-PRR 并联机器人机构属于存在非有势力的理想约束完整系统,系统的拉格朗日方程可写成:

已知系统的拉格朗日函数L=T -V。其中:T为动能;V为势能。由于机构所在平面为零势能面,故势能V=0;L=T。系统的拉格朗日方程可写为:

把系统的总动能方程式(6)代入拉格朗日方程式(8),选取li为广义坐标为广义速度,可求得各关节的驱动力:

3.6 动力学模型数值算例与Adams仿真分析
动力学仿真在机构设计阶段有重要意义,可通过机构动力学仿真,确定驱动功率大小、分析负载特性等,同时仿真分析也可以验证理论计算的正确性。因此,有必要对平面3-PRR并联机器人机构进行动力学仿真分析。
数值算例的理论计算部分采用Matlab,分别对理论计算结果和Adams 软件仿真结果进行对比分析。平面3-PRR并联机构末端在运行圆形轨迹的时候,3个关节运动对称,为了验证理论计算的正确性和便于观察,轨迹将采用圆形轨迹,对比理论计算的每个关节的广义力和仿真得到的驱动力,如图2、3 所示。
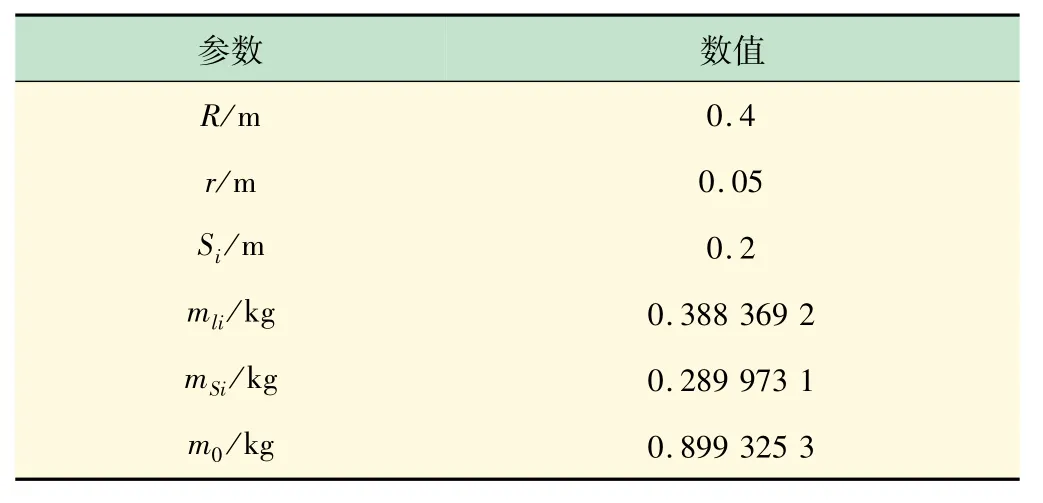
表1 计算仿真参数表
动平台和定坐标系之间的角度φ=30°,动平台中心沿一个半径为0.01 m的圆形轨迹运行,轨迹的圆心为全局坐标系原点OA,每0.2 s 运行一周。轨迹方程表达式为:

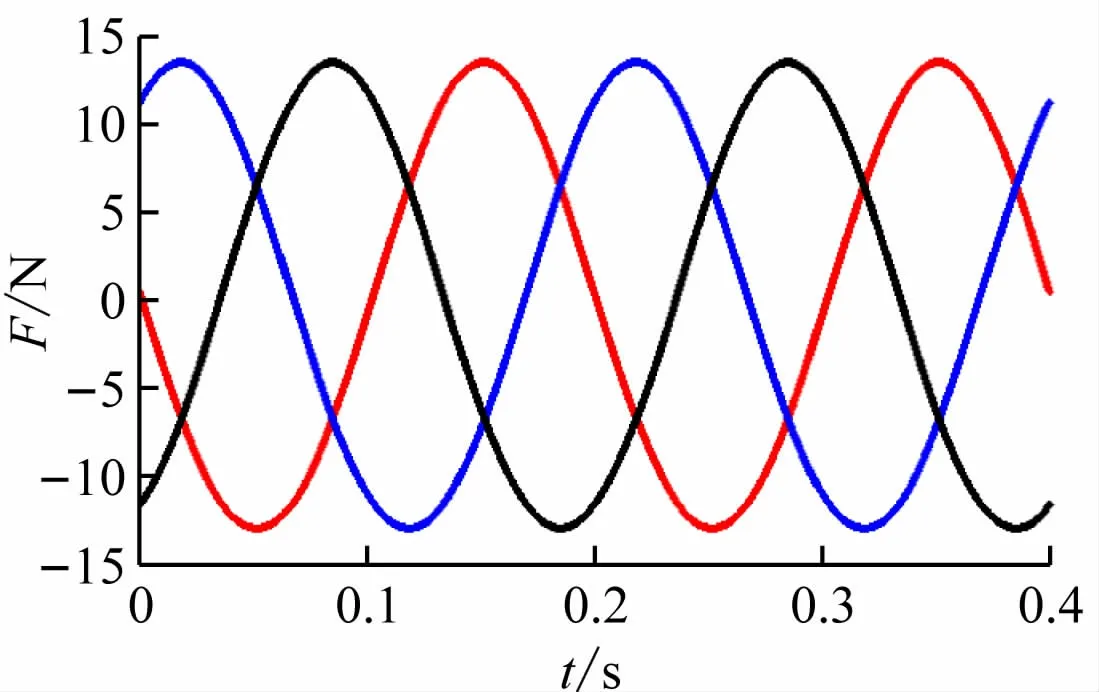
图2 空载时Matlab计算曲线图

图3 空载时Adams仿真曲线图
动平台质心的初始坐标为:x0=0.01,y0=0,φ0=30°。
通过图2、3 的曲线对比,可以看出理论计算结果的值和Adams仿真的结果的值基本一致,3 个关节的运动对称,相位互差2/3 πrad。Adams 仿真结果验证了3-PRR并联机器人机构动力学建模的正确性。
在动平台质心处沿着定坐标系x 轴方向施加5N的负载力,保持式(10)的运动轨迹不变,进行Matlab数值计算与Adams仿真对比分析,结果见图4、5。

图4 负载为5N时Matlab计算曲线图
通过对比图4、5 和图2、3 可以看出,给动平台添加负载之后,各驱动杆的驱动力都收到不同程度的影响,Adams仿真结果和Matlab计算的结果基本一致。

图5 负载为5N时Adams仿真曲线图
4 结语
在机械原理课程设计中对平面3-PRR 并联机器人机构进行动力学建模和分析。建立了3-PRR 并联机器人机构的运动学反解数学模型,基于第二类拉格朗日方程对平面3-PRR 并联机器人机构进行逆刚体动力学建模,推导出3-PRR 并联机构的系统动能方程,计算了系统的等效广义力,在空载和施加负载力两种情况下进行数值计算,分别求解出了在相同给定轨迹下空载和负载时各个驱动关节的驱动力,并采用Adams仿真结果与Matlab 理论计算结果进行对比分析,验证了理论建模的正确性。
