基于多种传感器组合的坐姿检测系统设计
2021-03-23张思宽郑文雄徐怡飞
张思宽 郑文雄 徐怡飞
(天津工业大学 机械工程学院,天津300387)
1 概述
随着青少年学习生活负担越来越重,因久坐、坐姿不正而导致的各类疾病正日渐低龄化。久坐时不会一直保持良好的姿态,还可能出现高低肩、脊柱侧弯、骨盆侧倾等体态问题。若长时间不纠正,会影响学生的健康和生长发育[1]。本文设计了一款基于柔性压敏传感器和红外测距传感器的坐姿检测系统, 它能够有效地监测出使用者的坐姿数据, 通过单片机运算出坐姿判断结果。坐姿判断结果和测量数据传输到上位机, 由上位机中的MATLAB 收集后处理,最后显示出压力热力图、倾斜角度和坐姿判断结果。
2 系统总体设计
本检测系统主要由柔性压敏传感器阵列、压力信号处理电路、红外测距传感器电路、单片机和上位机共五部分构成,原理框图如图1 所示。柔性压敏传感器阵列主要由传感器阵列和相关附属电路组成;压力信号处理电路主要由模拟开关构成,压力信号经过处理电路后由单片机自带的ADC 进行处理;由于红外测距传感器本身输出的为数字信号,故可直接传入单片机;单片机程序处理完得出坐姿的判断结果,之后数据由USB 接口传入作为上位机的计算机中, 由计算机进行热力图的绘制和结果的显示。
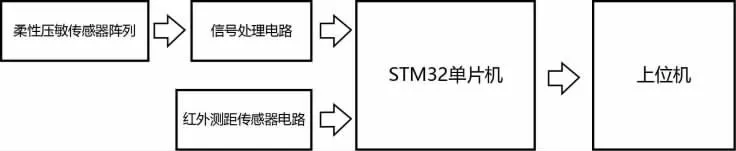
图1 系统原理图
2.1 系统硬件设计
本系统的硬件部分由四个部分组成, 它们分别是柔性压敏传感器电路、压力信号处理电路、红外测距传感器电路和单片机电路。
2.1.1 柔性压敏传感器电路
为了测量出使用者坐姿的坐垫部分压力分布情况, 本系统采用柔性压敏传感器阵列作为检测坐姿压力数据的主要元件。本压敏传感器的原理是当压力作用于传感器时, 电阻值发生相应的变化,从而得到相应变化的电压值[2]。柔性压敏传感器阵列选用柔希科技的RX-M1616L 压敏传感器阵列, 该传感器有16行16 列,共256 个感应单元,每一个感应单元相互独立,它们分布在456mm 长357mm 宽的长方形内,每一个感应单元的长宽均为25.1mm 和18.3mm,传感器阵列实物图如图2 所示。
当施加压力到传感器上时, 其电阻会随着压力的变大而变小,其电阻和压力呈现出反比例函数关系,而其电阻的倒数则和压力近似呈线性关系,其电阻和压力的关系图如图3 所示。
柔性压敏传感器信号采集电路如图4 所示, 图中的R 为用来分压的电阻,它们的电阻值分别为10kΩ,传感器中的每一个敏感单元都可以看作一个可变电阻, 输出端的输出电压分别反映这256 个敏感单元的电阻,从而反映使用者的压力分布情况。
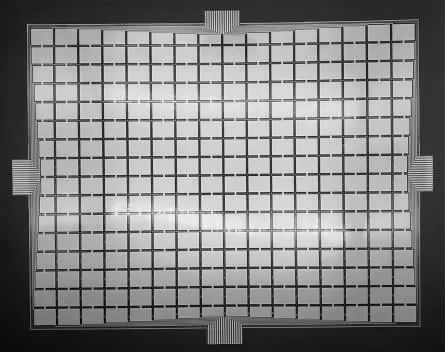
图2 柔性压敏传感器实物图
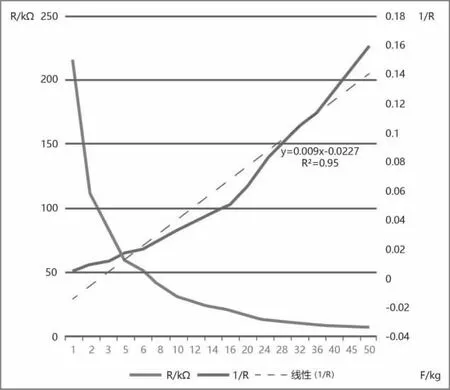
图3 电阻-压力关系图
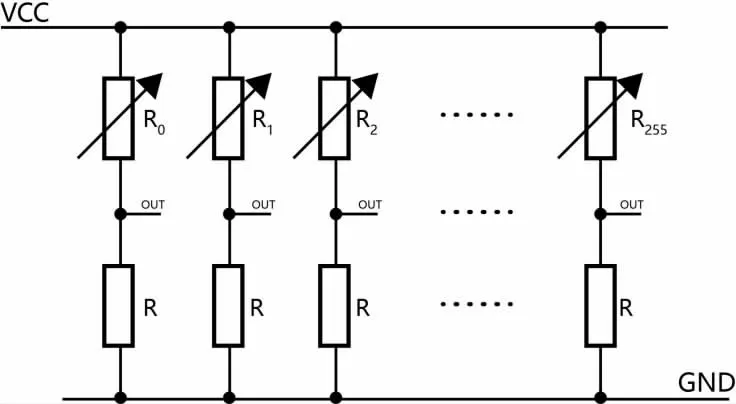
图4 压敏传感器阵列压力采集等效原理图
2.1.2 压力信号处理电路
由于压敏传感器阵列有16 行16 列共256 个敏感单元,故采用多选一的模拟开关进行信号处理。模拟开关则采用由德州仪器的CD4067 十六选一模拟开关。由单片机向CD4067 发出控制信号,CD4067 根据控制信号选通相应输出接口,CD4067 的输入接口连接电源, 每一个输出接口可以为一行传感器敏感单元供电,从而使该行传感器工作,该行16 个敏感单元的信号直接输入到单片机的ADC 接口中,CD4067 的控制电路如图5 所示。
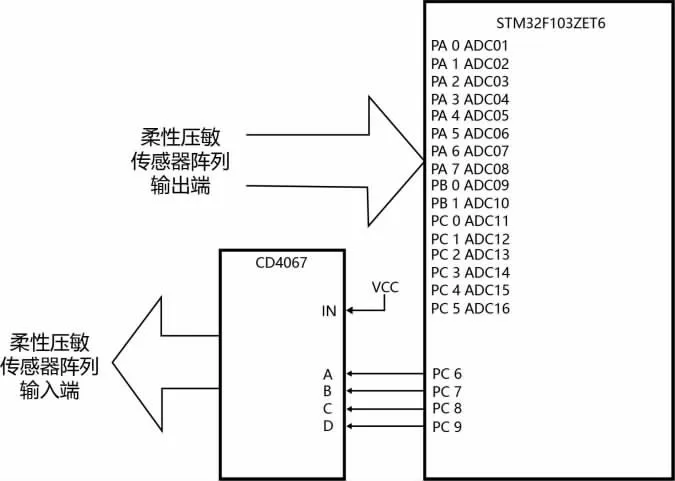
图5 单片机对CD4067 控制电路图
2.1.3 红外测距传感器电路
为了进行坐姿的前后倾判断, 本系统采用测量使用者背部倾斜角度的方式进行判断。在坐垫靠背处安装两个红外测距传感器,分别对应使用者背部脊柱中线上下两点,传感器保持水平同方向。上下两个传感器同时测量使用者背部两点到传感器的水平距离,将数据传输到单片机中,由单片机进行处理。红外测距传感器采用意法半导体的VX53L0X 传感器,最长测量距离为2m,内部集成了光学测量所需要的滤波器和驱动电路,可以直接与单片机通过I2C 通信。单片机对红外测距传感器控制电路如图6 所示。
2.1.4 单片机电路
本系统采用意法半导体的一款基于ARM 内核的微控制器的STM32F103ZET6 单片机。单片机电路中包括了必要的电源电路和通信电路。单片机将柔性压敏传感器阵列和两个测距传感器获得的数据进行处理, 求出前后倾判断结果和左右倾判断结果, 和测量得到的数据一起通过串口连接CH340 芯片,由CH340 芯片将串口信号转换为USB 信号后传入上位机。

图6 单片机对VX53L0X 控制电路图
2.2 数据获取与处理
本系统从传感器获取数据和处理的工作主要是在单片机中进行。单片机程序主要包括两大部分:分别为左右倾判断程序和前后倾判断程序。左右倾判断程序负责柔性压敏传感器阵列的数据获取和处理, 前后倾判断程序负责红外测距传感器的数据获取和处理。
2.2.1 左右倾判断程序
左右倾判断程序通过单片机控制ADC 运行扫描模式, 使模拟开关对压敏传感器阵列的每一列进行扫描, 并将数据进行保存, 形成一个16×16 的压力矩阵, 最后通过对矩阵进行计算处理,得出左右倾判断结果。正常坐姿时,身体处于端正状态,压力矩阵具有左右对称性[3]。我们分别将压力矩阵的左边8 列数据和右边8 列数据进行求和,分别记作L 和R,则左半部分和与右半部分和之差△为

设置阈值为P,P 为正数。将P 与△比较,得出判断结果,程序框图如图7 所示。
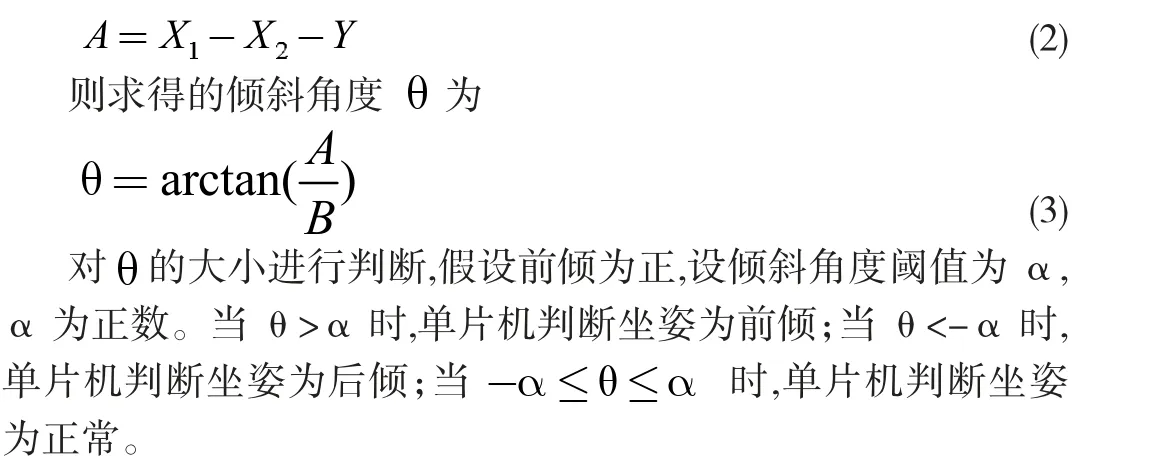
2.2.2 前后倾判断程序
前后倾判断程序以单片机为控制核心,采集两个红外测距传感器的数据, 通过对数据的计算分析得出使用者背部倾斜角度来判定使用者是否为正确的坐姿[4]。其原理图如图8 所示。
单片机采集到的上红外测距传感器测得距离和下红外测距传感器测得距离分别记作X1和X2,上下红外测距传感器之间的垂直距离为B, 在安装调试时水平方向上两个红外测距传感器之间有一定距离,记作Y,Y 为正数,则为求得使用者的前倾角度,前倾距离A 为
2.3 数据可视化
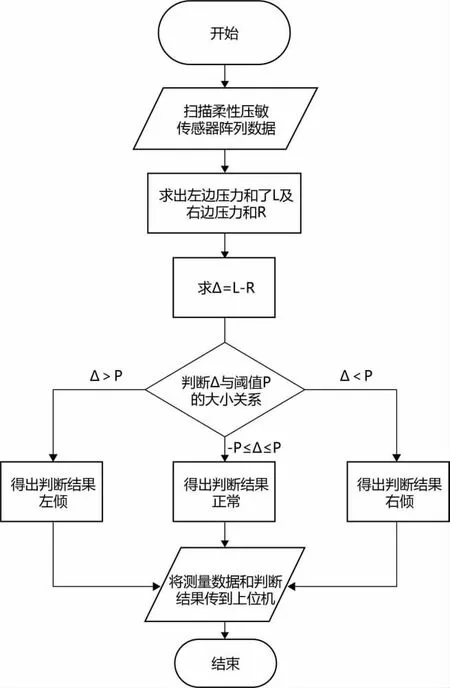
图7 左右倾判断程序框图

图8 前后倾角度求解原理图
本系统的数据可视化主要由上位机来负责,单片机采集到的压敏传感器阵列各点的数据、左右压力和、左右倾判断结果、上下红外测距传感器测得距离、使用者倾斜角度和前后倾判断结果通过USB 接口传入上位机, 由上位机的MATLAB 接收并处理。
利用MATLAB 提供的设备控制工具箱与图形用户界面工具箱对串口通信与用户界面进行设计[5]。接收到的压力传感器阵列数据在MATAB 中经过处理后在UI 上显示为热力图的形式,其他结果则直接显示在MATLAB 设计的UI 上。
3 系统实现
完成系统的各项设计后,我们进行了实物的制作。在制作实物的过程中,考虑到使用者的舒适度,我们在柔性压敏传感器阵列上垫上了一个坐垫,将两个红外测距传感器装入一个靠垫中,两红外测距传感器水平距离为110mm,垂直距离为215mm。
为验证系统的可行性,我们随机选择了一位志愿者进行了正坐和左前方撑桌子两个动作的测量,志愿者的体重约为70kg。我们设置左右倾的阈值为10kg,前后倾阈值为10°。
志愿者正坐时,背部两测距点因人体脊柱生理状态存在一定的倾斜角度,左右股坐姿压力和也存在一定的差值,但仍在正常正坐坐姿范围内,因此系统综合判断为坐姿正常。
背部两测距点上下距离差偏大, 背部脊柱倾斜角度达到22.26°,系统判断为坐姿前倾。由于人体一部分压力因坐姿变化而被腿部及手部承担,因此左右股压力总和下降,但测得左右股坐姿压力和差值仍达到20.071kg,系统判断为左倾。因此系统综合判断为坐姿左前倾状态。
4 结论
随着社会现代化进程的不断发展,青少年学习生活的压力负担加重, 久坐行为已经不可避免。采用多传感器的坐姿检测系统, 针对不同坐姿压力数据变化及背部倾斜角度数据共同进行分析,能有效呈现使用者的坐姿状态,并作出判断及反馈。同时通过柔性压敏传感器测量相关坐姿压力数据可为座椅坐垫设计、人体工学研究等提供有效参考。考虑到不良坐姿给青少年身心发育成长健康带来的诸多不良影响, 通过外在手段对青少年不良坐姿进行矫正, 能有效辅助青少年采用正确坐姿进行学习生活,避免因不良坐姿引起的各类不良疾病。
