基于VIS-NIR的播种沟内土壤水分测量传感器研究
2021-03-20张东兴和贤桃张天亮
张东兴 刘 江 杨 丽 崔 涛 和贤桃 张天亮
(1.中国农业大学工学院, 北京 100083; 2.农业农村部土壤-机器-植物系统技术重点实验室, 北京 100083)
0 引言
在农业领域,适宜的土壤水分对种子萌发、作物生长具有重要作用。相关研究表明,基于土壤水分信息对播种深度进行实时调控能有效促进种子萌发和出苗,对作物增产增收具有重要意义[1-2]。基于土壤水分调整播深的技术需要对种子落种环境即种沟的土壤进行测量,以便根据种沟的土壤水分信息进行播种调节和改变播种策略。
传统的烘干法进行土壤含水率测定具有精度高的优点,但该方法不能原位测量,对土壤具有破坏性,且测量耗时长。介电法(包括时域反射法、频域反射法、时域传输法等)利用土壤的介电特性来测量土壤含水率[3-6]。通常将基于此原理开发的传感器探针插入土壤,通过与土壤接触获得时间、电压等参数来间接测量土壤水分。这种方法获得的是某一立体空间内的土壤含水率,难以实现某一点或某一层土壤水分的测量。对于种沟土壤水分测量需要频繁地将探针插入土壤,易引起腐蚀和磨损,影响使用寿命。
随着光谱学分析技术的发展,可见光-近红外(Visible and near-infrared,VIS-NIR)方法被广泛应用到土壤特性参数测量研究上[7-10]。在VIS-NIR波段内,土壤含水率影响其反射光谱,一般在近红外区最为敏感[8],在可见光区有一定的敏感性[11]。采用此法开发的土壤水分传感器可以实现对土壤水分的快速测量,是土壤水分测量发展的重要方向。国内外许多学者对应用可见光、近红外技术测量土壤水分进行了相关研究[11-18],部分学者研究了土壤水分光谱模型分析的构建方法,为传感器的开发奠定了理论基础。基于光谱原理开发的土壤水分测量设备[12-13],其机械结构和光谱测量模型适用于自身测量设备提供的特定环境,难以直接用于对播种沟内的土壤水分测量。因此,研究适用于播种沟土壤水分测量的传感器对基于土壤含水率的播深调整技术的推广和使用具有重要意义。
为实现精密播种沟单点土壤水分的快速测量,本文分析波段400~1 000 nm内不同含水率土壤的反射光谱,应用多种数据降维方法选取特征波长,在对不同特征波长进行组合建模分析后,设计一种VIS光源和短波NIR双波长光源式土壤水分传感器,并对其进行测试和性能评价。
1 结构与原理
传感器结构如图1所示,VIS光源、NIR光源与水平方向呈45°,被对称胶固于W形支架上且位于光电传感器两侧。为避免VIS光源与NIR光源相互干扰,单片机供电并控制两个光源交替发光,照射土壤。土壤的反射光通过蓝宝石窗口集中后由光电传感器接收,并将光强信号转换为对应大小的电压信号。由于光电传感器转换后的电压强度很微弱,为提高其信噪比,采用运算放大器对电压信号进行滤波和放大,并输入到数据采集卡中。数据采集卡将采集的模拟电压数据转换为数字信号后传输至计算机端进行处理,由计算机端构建的土壤水分预测模型得到土壤含水率。
2 光源波长的确定
光源是传感器的核心元件,确定最佳光源波长是传感器正常高效工作的关键,因此需要对不同含水率土壤进行光谱数据获取和分析,以筛选出适合土壤水分测量的最佳光源波长。
2.1 土壤光谱数据的获取
试验土壤采用砂壤土,将取回的土壤样本用恒温干燥箱(DHG-9123A型,上海)在105℃下干燥12 h,干燥至恒质量后用10目土壤筛过筛。向过筛后的土壤中加入不同质量的水,获得7个梯度含水率的土壤,将土壤放入直径为60 mm的玻璃皿中,每个梯度配置3份样本,共21份样本。实际播种过程,开沟器会对种沟起一定的刮平作用,因此试验过程中刮平样本表面以减小土壤颗粒间隙对数据采集的影响。
使用QE Pro型高性能光谱仪(Ocean Optics, Inc.,美国)采集不同含水率下的土壤光谱数据,其可测波段范围为185~1 100 nm,光谱分辨率(FWHM)为1.1 nm,使用前进行白板校正。光源为HL-2000型卤钨灯光源(Ocean Optics, Inc.,美国),配合VIS-NIR实验室级分叉光纤(Ocean Optics, Inc.,美国)进行试验。试验时,将表面刮平的土壤样本迅速放至光谱仪光纤探头下,以减少样本表面水分散失对采集结果的影响。采用五点取样法获得每份样本上5个点的土壤反射光谱。
测量完毕后的土壤样品被放至铝盒中进行称量,然后将土壤样品放入恒温干燥箱中,在105℃下干燥12 h,再让其冷却至室温后进行二次称量,两次质量差与干燥后土壤质量的比值即为土壤质量含水率,以此获得所测土壤试样的准确含水率。共获得7个水平的土壤含水率,分别为0.01%、4.35%、8.45%、12.19%、16.54%、19.73%、23.66%,以及105个与土壤含水率相关的反射光谱数据。
2.2 土壤光谱数据分析
2.2.1光谱数据的预处理
由于低于400 nm和高于1 000 nm波长的光谱数据信噪比低,故不采用上述波段的光谱数据,只采用波段400~1 000 nm光谱数据进行分析。考虑到探头至土壤样本表面的距离不能保证绝对稳定,需要对获得的反射光谱数据进行去异常处理。采用蒙特卡洛交叉验证(Monte Carlo cross validation,MCCV)对异常样本值进行筛选,获得91个有效数据。


表1 不同预处理方法的建模结果Tab.1 Results of different pretreating methods

2.2.2特征波长的选取
为选取出能预测土壤含水率的最佳波长,采用相关系数法、连续投影算法(Successive projections algorithm,SPA)、无信息变量消除法(Uninformative variables elimination,UVE)、竞争自适应加权采样法(Competitive adaptive reweighted sampling,CARS)、随机跳蛙法(Random frog,RF)等方法[20-25]对SG平滑预处理后的光谱数据进行特征波长的选取。相关系数法即利用PLSR模型各波长相关系数表示其在模型中的重要程度,即相关系数绝对值越大,说明该波长表征的信息越多,如图2a所示,采用该方法得到4个峰值点,共选取4个特征波长。SPA方法可以通过提取少量变量达到提取较多模型有效信息,以减少信息重叠,当预测平均标准偏差达到最小值时所对应的变量个数即为选取的特征波长数量,如图2b所示,采用该方法在运行次数N=10时RMSE最小,此时共选择10个特征波长。UVE法通过在光谱信息中加入噪声信息,进行交叉验证后剔除无关变量,得到新的系数矩阵,通过比较系数矩阵绝对值大小可选择特征变量,如图2c所示,采用该方法以稳定性大于3为阈值条件选取37个特征波长,由于选出的特征波长数量较多,在其基础上采用SPA法进行二次选择,如图2d所示,UVE+SPA法选择出5个特征变量。CARS法是对PLSR模型回归系数根据“适者生存”原则进行筛选,除去绝对值小的系数后进行交叉验证,交叉验证均方根误差小即为最优变量,如图2e所示,根据该方法在运行24次时获得最小RMSECV,此时选取47个特征波长,同理,在其基础上采用SPA法进行二次选择,如图2f所示,CARS+SPA法选择出5个特征变量。RF算法通过不断更新变量子集直至到达预设迭代次数后,统计每个变量被选择的概率,依据此概率选择最优波段,如图2g所示,采用该方法在迭代10 000次后,可直观看出4个最优波段。
上述方法选择出的特征波长或波段中,在波长410、540、780、970 nm附近的特征波长被选中的次数最多,说明这4种波长最能表征波段400~1 000 nm内土壤水分信息,因此将这4个波长作为土壤水分传感器的候选波长。
2.2.3最佳波长组合的选取
本文采用双波长光源进行土壤水分测量传感器的设计,在选择的4个主要特征波长中,410、540 nm属于VIS范围,780、970 nm属于NIR范围。将4种波长两两组合并进行二元线性回归分析,共得到6种组合方式,计算每种组合方式预测值与真实值的决定系数R2、均方根误差(RMSE)、拟合值标准差(SD)以及相对分析误差(RPD)。R2越大,拟合度越优;RMSE越小,估算能力越好;RPD是SD与RMSE的比值,当RPD大于2时,说明有很好的预测能力[15]。不同波长组合计算获得的参数如表2所示。

表2 不同波长组合预测结果Tab.2 Results of different wavelength combinations
从表2可知,780 nm与970 nm组合的RPD最高,说明这两种波长组合对土壤含水率预测能力最优,而410 nm与970 nm组合的R2和RPD略低于780 nm与970 nm组合,考虑到使用VIS光源可以降低设计成本且更利于传感器搭建,因此采用410 nm VIS光源与970 nm NIR光源作为传感器光源。
3 传感器设计
3.1 光源与光电传感器
根据2.2.3节分析要求的VIS-NIR光源,选用3535型410 nm单色波长LED与3535型970 nm单色波长LED作为传感器光源。其中410 nm波长LED正常工作电压为3.2~3.6 V,970 nm波长LED正常工作电压为2.0~2.2 V,工作电流均不大于700 mA,发光角均为120°,通过蓝宝石窗口后能形成较大区域的光斑。为提高LED散热性能以及便于灯珠的固定,采用回流焊将LED焊接在8 mm直径3535型LED专用铝基板上。
光电传感器采用SGPN96CR型线性硅光电池,该半导体体积小、灵敏度高、响应速度快、线性度好。本文采用面积为3.5 mm×5.5 mm的SGPN96CR型线性硅光电池,其光谱响应范围为360~1 100 nm,能同时接收前述两种光源的反射光;暗电流为5 nA,不影响正常情况下反射光的接收;响应时间约为2 μs,响应迅速。
如表3所示,本文所采用的光源、光电传感器成本较低。通常情况下,光谱仪的价格在上万元,长波近红外光源及配套的光电探测器价格也在百元以上且需要定制。因此,与采用光谱仪式和长波近红外式传感器相比,本设计降低了开发成本。
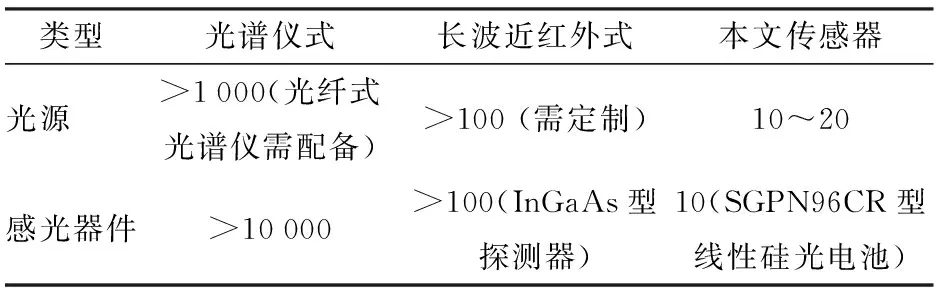
表3 VIS-NIR传感器与光谱仪式、长波近红外式成本对比Tab.3 VIS-NIR sensor compared with using spectrometer or LW-NIR light source in cost 元
3.2 电路设计
两个LED正常工作电流需不大于700 mA,使用单片机模块输出5 V电压并搭建电阻分压电路对其进行供电。同时,单片机IO口控制LED负极电平,当IO口为低电平状态时LED发光,为高电平状态时LED熄灭。两个LED间隔约2 s交替发光,以便采集到稳定的数据。由于硅光电池接收到的反射光较微弱,输出电压信号较小,需要对信号进行放大处理,采用LM358直流放大模块对信号进行放大处理,增益约100倍。采用MPS-010602型数据采集卡对传感信号进行数据采集,该采集卡的AD转换模块可将采集到的模拟电压信号转换为数字电压信号,分辨率可达2.5×10-3V,精度较高,满足数据采集要求。将采集的电压信号保存至上位机,便于后续分析处理。
4 试验与结果分析
4.1 测量距离影响试验
4.1.1试验材料与方法
通过Matlab中的rand函数随机生成0~24%之间共60组含水率,用恒温干燥箱将试验土壤在105℃下干燥12 h,干燥至恒质量后按随机生成的土壤含水率加入不同质量的水混合均匀。将配置好的试验样品装入玻璃皿中刮平进行测量。
如图3所示,将传感器固定在支架上,装有试验土壤的玻璃皿放在传感器下方,玻璃皿下方垫有6块厚度为3 mm的平整塑料板,此时土壤表面紧贴传感器下表面的蓝宝石窗口。通过移除塑料板可改变传感器与土壤表面的距离d,以此探讨传感器与土壤表面距离对测量结果的影响。通过MPS-010602型数据采集卡采集电压信号,采集速度为每秒10个数据,计算机接收数据并实时显示采集的电压信号曲线,图4为采集到的信号波形图。其中高电压为NIR光源发光时光电传感器接收NIR反射光后产生的电压,低电压为VIS光源发光时光电传感器接收VIS反射光后产生的电压。间隔2 s采集一次数据,每次采集20个电压数据。
每次测试完后将试验土壤装入铝盒称量,放入恒温干燥箱干燥12 h后进行二次称量,获得60组试验土壤含水率,由于不同含水率土壤配置存在误差,获得的实际试验土壤含水率中最小为0.69%,最大为28.45%。
4.1.2结果分析
对采集到的电压进行分析,获得不同土壤含水率下光电传感器分别接收VIS和NIR反射光产生的电压平均值。由于波长410 nm与970 nm反射强度与土壤含水率之间具有较好的线性预测度,所以认为光电传感器两端输出电压与土壤含水率之间也存在线性关系,可用电压与土壤含水率构建线性回归模型,通过分析预测值与真实值的相关程度评价传感器效果。不同测量距离d下的预测值与真实值的相关性如图5所示。
从图5a、5b可以看出,当d为0、3 mm时,预测值与真实值之间相关程度较高,R2分别为0.80和0.81,说明本文设计的传感器在距离土壤较近时(0~3 mm)具有较好的土壤含水率测量精度,当测量距离d由0 mm增加到3 mm时,测量结果受影响很小,因此在该范围内的测量距离具有较高的测量稳定性。当d>3 mm时,预测值与真实值线性相关程度骤然降低且趋于平稳,这可能是由于测量距离过大,光被漫反射至各个方向,无法通过蓝宝石窗口进行集中,光电传感器接收到的信号过弱导致其两端电压没有明显变化造成的。因此,为保证传感器较高的测量精度和稳定性,在对土壤水分进行测量时,应将传感器与土壤表面的距离维持在0~3 mm。
当d=3 mm时,预测值与真实值之间的线性相关度最好,从图5b可以看出,含水率大于22%偏离预测趋势最远,可能是由于当试样土壤含水率大于22%时,试验所用土壤表面已经逐渐开始出现水分渗出现象,影响了反射光的接收。去除大于22%的土壤含水率后进行线性相关性分析,结果如图6所示,R2提高至0.93,RMSE降低为1.72%,说明本文设计的传感器在土壤含水率低于22%时有更好的预测能力。而玉米等作物适宜播种的含水率为15%~20%[26],可以满足其播种作业环节的土壤水分测量需求。
4.2 温度与光照强度影响试验
4.2.1试验材料与方法
本文研究的是基于光学的土壤水分传感器,其测量准确度可能会受到环境光影响。本文设计的传感器主要用于精播过程中对土壤水分的测量,不同时节播种环境温度有差异,温度可能会对传感器造成影响。因此,本文以光照强度、温度为因子对传感器进行析因试验分析,探讨温度、光照强度以及二者的交互效应对传感器工作的影响。表4为两因子析因设计,试验重复4次。

表4 两因子析因设计Tab.4 Factorial design with two factors
将实验室试验所用同种土壤装入体积为150 mm×500 mm×200 mm的花盆中,放入可设置不同温度、光照强度的智能气候箱(HornTech, GC-450C)中,采用本文传感器按析因设计表中的因子水平进行土壤含水率测量,并在测量完后取相应测量点处的土壤装入铝盒,用烘干法测得真实含水率。
4.2.2结果分析
取每次传感器获得的预测值与烘干法获得的真实值之差的绝对值Δw作为评价标准,对试验结果进行方差分析,方差分析结果如表5所示。在显著性水平α为0.05时,对于因子A有FA 表5 析因试验方差分析Tab.5 Analysis of variance of factorial test 土槽实验室可以较好地模拟田间环境与土壤分布,试验土槽为中国农业大学土槽实验室土槽,其土壤与实验室试验所用土壤为同一种土壤。通过环刀法测得试验区域土壤容重为1.40 g/cm3。播种机在土槽上开出种沟,使用本文设计的传感器每隔一定距离采集1次数据,共采集30个单点土壤含水率。每次采用本文传感器采集后,立即采集该点土壤装入铝盒,通过烘干法获得实际含水率。分析土壤含水率预测值与真实值之间的相关性,得出预测值与真实值之间R2仅为0.62,相关性较弱。从图7可以看出,点4与点15处的土壤含水率预测值与真实值之间差异过大,导致整体相关性较低。 图8为测量中存在的干扰情况。点4和点15处土壤含水率预测值明显高于该点处真实值。对于点4,原因是测量点处存在石块。传感器光源发出的光照射在石块表面,由于石块和土壤在颜色、密度等物理性质上有着明显差异,且其对不同波长光敏感度也不同,光电传感器接收到异常的反射光,导致异常测量结果。对于这种情况,在发现异常后可通过观察测量点是否存在石块进行排除,也可以通过对比土壤含水率整体趋势进行异常排除。点15处预测值虽然也明显高于真实值,但该点处的土壤含水率真实值与土壤整体含水率趋势明显存在较大差异,这可能是烘干法取样操作失误导致。在取土用于烘干法测量真实值的过程中,拿起传感器过程中的碰撞或实验人员对种沟边缘的踩踏等会导致表层干土掉落至测量点,从而引起所取土样含水率产生误差。 除去上述2个异常点后,预测值与真实值之间R2为0.82,RMSE为1.23%,测量效果较好。但该结果与实验室测量效果存在差距,原因是实验室试验的土壤样本为人为配置,土壤含水率均匀,而实地试验测量点土壤与所取用于烘干法的土壤样本含水率存在一定差异,即实验室所用土样通过烘干法获得的土壤含水率比实地土样通过烘干法获得的土壤含水率准确度高。 (1)通过试验与光谱数据分析,获得了波段400~1 000 nm内不同含水率土壤的敏感波段分别在波长410、540、780、970 nm附近;通过对这4种波长进行组合建模分析,选择出组合预测最优的VIS和NIR波长为410 nm和970 nm。 (2)以410 nm VIS光源与970 nm NIR光源设计双波长VIS-NIR土壤含水率传感器。试验表明,当传感器距被测土壤表面0~3 mm时,土壤含水率在0.69%~28.45%范围内,预测值与真实值之间R2可达0.81,RMSE为2.90%;在0.69%~22%范围内,预测值与真实值之间R2可达0.93,RMSE为1.72%,具有更高的测量性能。 (3)研究了传感器底面与被测土壤表面之间的距离d对传感器测量结果的影响。结果表明,当d为0~3 mm时,传感器测量效果较好;当d>3 mm时,传感器预测效果较差,并不再发生变化。因此传感器正常工作的最佳方式是使传感器底部紧贴或靠近被测土壤表面。 (4)研究分析了传感器实际工作效果,通过析因试验得出温度、光照强度对传感器正常工作没有显著影响。通过土槽试验得出,土壤中存在石块、取土操作会引起测量异常,影响预测值与真实值之间的相关性。去除异常值后,预测值与真实值之间R2为0.82,RMSE为1.23%,具有较好的测量效果。
4.3 土槽试验
5 结论