跑道异物检测光学传感器舱环控系统实验研究
2021-03-20周云霆余南阳范若琛
周云霆 余南阳 范若琛
跑道异物检测光学传感器舱环控系统实验研究
周云霆1余南阳1范若琛2
(1.西南交通大学机械工程学院 成都 610031;2.中国民用航空局第二研究所 成都 610041)
通过对机场跑道异物检测光学传感器舱内温度以及环控系统运行参数的实验测试,分析镜头类型、环控系统控制方式及控制参数对舱内温度的影响。实验结果表明:镜头类型对舱内空气平均温度稳态变化值影响小于3%;环控系统采用串级调节,供液温度设置为28℃,压缩机差动范围设置为1℃,主调节器死区温度取0.2℃、采样时间取10min、比例系数取2.5时,可满足环控要求且利于环控系统节能。
FOD光学探测系统;环控系统;实验分析;控制策略
0 引言
塔架式机场跑道异物(FOD)光学探测系统是利用光学检测技术发现机场跑道异物的探测系统,是当前维护机场跑道运行安全的先进解决方案之一[1]。探测系统中的光学传感器舱设计安装于全国主要机场跑道两侧的塔架上,舱外环境的气象条件较为复杂。与此同时,传感器舱内高清光学镜头焦距可达2000mm,且在对机场跑道扫描过程中需要通过对焦模块与精密伺服云台进行连续对焦,对其所处的舱内环境参数有较高要求[2]。因此对塔架式光学机场跑道异物传感器舱环控系统的研究十分必要。
目前对光学设备所处舱体的环控技术研究较多,主要涉及被动热控、主动热控及防结露技术。常用的被动热控技术有舱体表面及其与基座连接处采用保温隔热材料,舱体外表面喷涂热控涂层或设置遮阳罩,采用高导热、高热容材料改善舱体热特性等[3]。主动热控技术有采用电加热、热电制冷或蒸汽压缩制冷等方式控制舱内温度,采用风扇提高舱内温度均匀性等,控制系统多采用开关控制与PID控制,部分采用预估补偿控制、串级控制与模糊控制等改善控制品质[4,5]。防结露技术有舱体密封、放置干燥剂、采用中空玻璃、敷设ITO薄膜、改变玻璃表面疏水性、设置电动雨刷等[6,7]。针对塔架式光学机场跑道异物传感器舱的环控技术研究则较少,2018年刘双富提出了舱体壁面辐射换热结合强化对流的控制方案,并进行了实验验证[8]。
本文在上述研究的基础上,通过实验分析镜头类型、环控系统控制方式及控制参数对舱内温度的影响。
1 传感器舱及其环控要求
1.1 塔架式光学FOD传感器
本文所研究的对象为某研究所研发的塔架式光学FOD传感器,设备安装于距机场跑道中线约150m的塔架上,塔架高度从1m到6m不等,其实物图如图1所示[2]。

图1 光学FOD传感器实物图
需要环控的区域为图1中部的方形铝合金传感器舱。传感器舱内安装有高清光学镜头、数字摄像机、对焦模块以及网络通信模块等,舱上安装有补光器,侧边通过转轴与精密伺服云台相连。
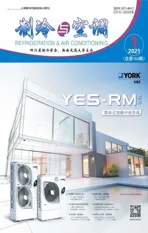
1.2 传感器舱环控要求

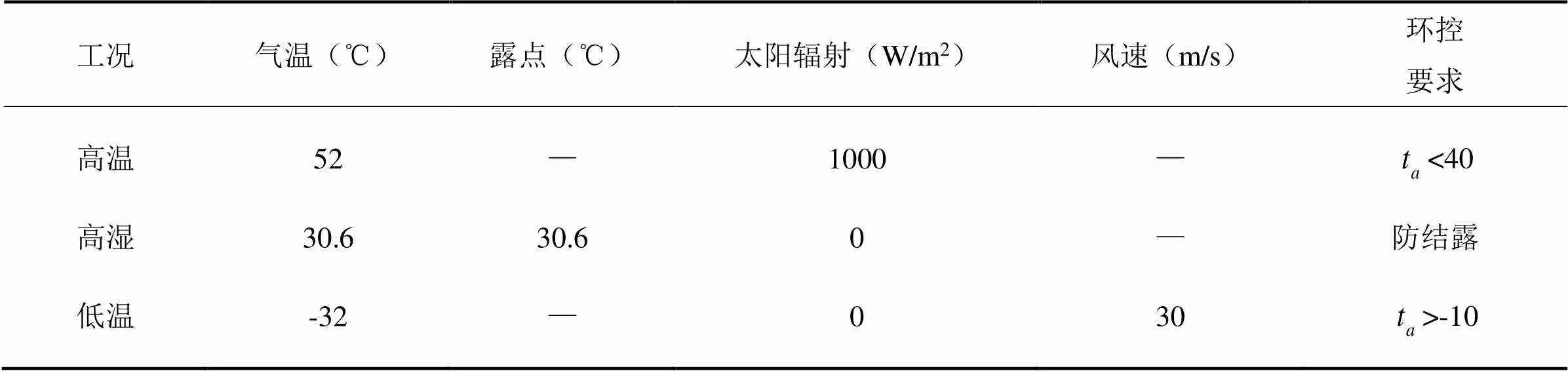
表1 稳态设计工况及其环控要求
各设计工况均要求舱内空气温差小于2℃。
2 舱内空气温度的调节方式
为达到上述环控要求,现采用的环控方案如图2所示[8]。
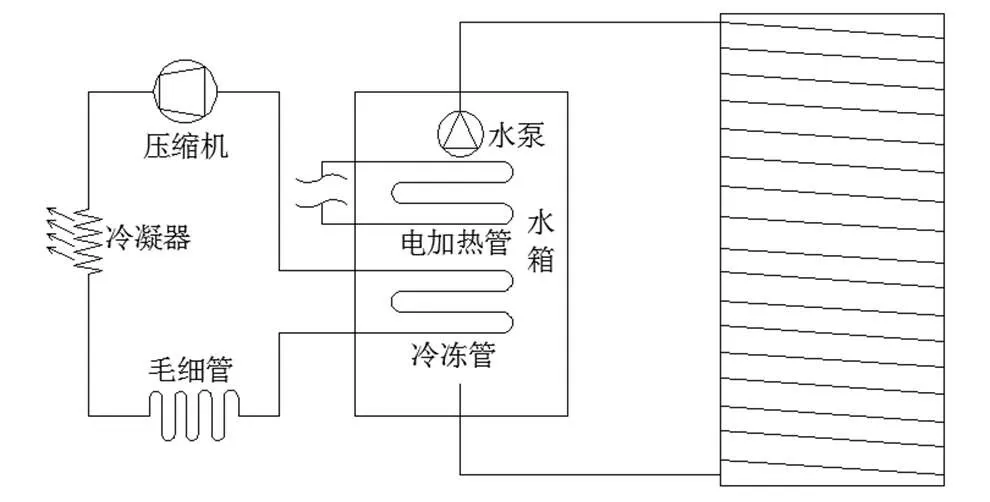
图2 环控方案示意图
传感器舱外设置遮阳罩,舱内安装风扇加强对流换热,外壳采用聚氨酯发泡保温,保温材料与外壳之间敷设换热管,管内走一定温度的防冻液。防冻液温度由冷热源设备控制。冷热源设备由防冻液箱、制冷装置(由压缩机、蒸发器、冷凝器、毛细管等组成)、电加热器、可调速水泵、控制系统等组成。
现有环控方案仅保持供液温度恒定,在非稳态工况下还不能满足环控要求。本文采用串级调节减小非稳态工况舱内空气温度变化值,并进行采样控制。主调节器选择带死区的增量式比例调节器,依据传感器舱内空气温度的增量调节防冻液温度的增量[10]。供液温度通过制冷装置双位调节与电加热管PID调节控制。舱内空气温度控制示意图见图3。
当防冻液箱有冷负荷时,通过双位调节器控制压缩机启停来控制防冻液箱内温度。当防冻液箱中的温度高于给定值上偏差,压缩机通电运转制冷;当防冻液箱中的温度低于给定值下偏差,压缩机断电停转,箱内温度逐渐回升。

图3 舱内空气温度控制示意图
当防冻液箱有热负荷时,通过PID调节器控制电加热管功率来控制防冻液箱内温度。电加热管PID调节器的设定温度为制冷装置双位调节器设定温度的下偏差,以避免电加热管与制冷装置冷热量相互抵消。
3 环控系统实验分析
3.1 实验设备
采用塔架式光学FOD传感器舱实物进行实验,安装于传感器舱内部的镜头、相机及其他电子元件等对其外部轮廓进行简化后,按相同材质相同尺寸加工其外壳模型,并按照元件发热情况在模型内部安装发热电阻,传感器舱内部结构如图4所示。
图4 传感器舱内部结构
温度测量与采集设备由热电偶和数据采集器组成,热电偶型号采用T型ETA1006T,数据采集器为安捷伦34980A。太阳辐射值测量仪器采用DELTA-T公司的SPN1型号日照强度计,风速测量设备采用testo-425热线风速仪。
舱内空气温度测点共布置14个,分别为前、中、后舱上下左右四个位置的12个测点以及镜头前与相机后的2个测点。舱内壁面温度测点共15个,分别为前、中、后舱上下左右四个位置的12个测点以及玻璃内外表面与后端盖内表面3个测点。
3.2 镜头类型对舱内温度的影响

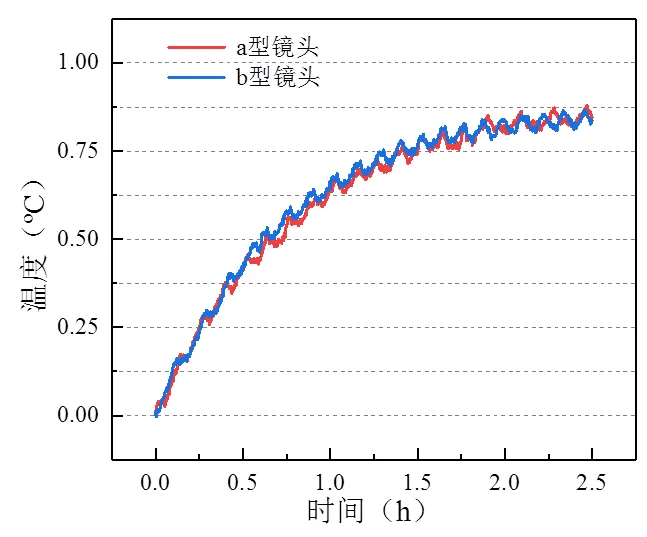
图5 镜头类型对舱温变化的影响
由图5可以看出镜头类型对舱内空气温度变化影响较小,安装a型镜头与b型镜头的舱内空气平均温度稳态变化值差值小于3%。
3.3 控制参数实验分析
3.3.1 压缩机差动范围


表2 压缩机控制方式对比
通过上述对比可以看出,由于传感器舱对供液温度波动有一定的衰减和延迟作用,采用方式三,虽然防冻液温度波动较前两种控制方式大,但传感器舱空气温度波动仍可控制在0.1℃左右,且压缩机启停频率明显降低。因此选定该控制方式控制供液温度。
3.3.2 供液温度
(1)供液温度对舱内温度极值的影响
供液温度直接影响舱内空气与壁面温度的极值,通过实验测得,高温工况舱内最高空气温度以及高湿工况舱内外最低壁面温度与供液温度的关系如图6所示。
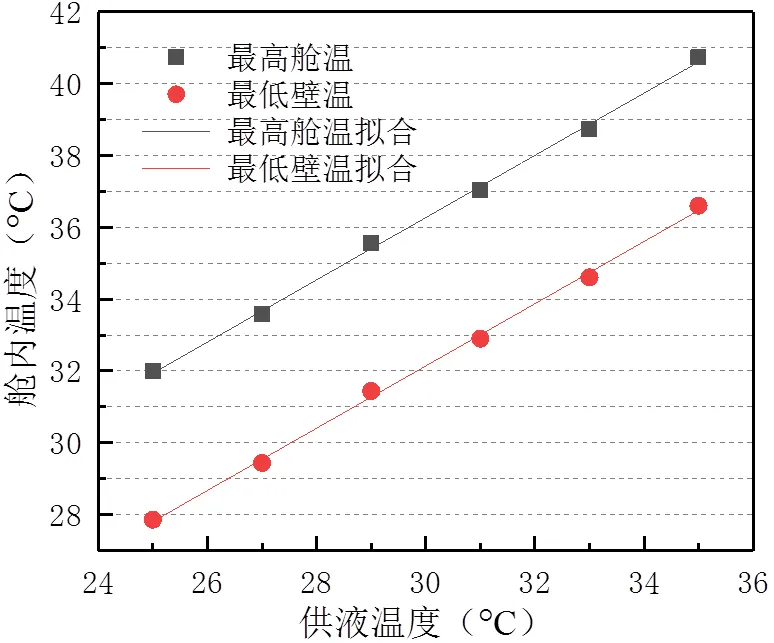
图6 高温、高湿工况舱内温度
从图6中可以看出,供液温度每增加1℃,高温工况舱内最高空气温度与高湿工况舱内最低壁面温度约增加0.87℃。当供液温度为28℃时,高湿工况舱内最低壁面温度高于环境露点温度且高温工况舱内最高空气温度不超过35℃,留有5℃安全余量。因此高温、高湿工况下供液温度取28℃。通过实验测得供液温度为28℃时,低温工况舱内空气最低温度高于23℃,满足环控要求。
(2)传感器舱负荷分布
由于在传感器舱内及环控系统中存在电子元件、散热风扇以及水泵等发热元件,且传感器舱及环控系统外表面大部分敷设保温材料,因此当环境温度低于传感器舱内空气温度的数值不大时,传感器舱仍有冷负荷。通过监测压缩机与加热管工作状态可以判断相应工况下环控系统的冷热负荷情况。实验结果表明在无太阳辐射、无风条件下,当环境温度高于5℃时,环控系统均有冷负荷;在有太阳辐射时,环控系统出现热负荷时的环境温度更低。
当环控系统有冷负荷时,提高供液温度设定值可降低冷热源用电量,延长压缩机启停周期。当环控系统由热负荷时,理论上也可适当降低供液温度节能,但降低供液温度会导致防冻液粘度增加,管内流速变慢,对传感器舱内空气温度控制和水泵运转不利。此外除严寒地区的冬季,其他地区环控系统热负荷维持时间相对较短,节能效果不明显。综合上述分析,供液温度稳态工况全年均设置为28℃。
3.3.3 主调节器控制参数分析
(1)死区温度
由于传感器舱内空气温度自身有0.1℃的波动,为减弱该波动对调节过程的影响,综合考虑设置0.2℃的死区温度范围。
(2)采样周期
采样周期的选择应综合考虑以下几方面[10]:
(a)采样周期应大于传感器舱的纯延迟时间2min,否则环控系统易出现震荡;
(b)采样周期应大于供液温度的调节时间,否则采样周期失去意义,本文环控系统供液温度变化3℃时,升温时间约需2min,降温时间约需5min;
(c)设置死区温度范围后,过小的采样周期将无法引起主调节回路动作。本文环控系统采样周期在9~20min时,在1h内不引起主调节回路动作的舱内空气温度最大变化值小于2℃;
(d)在考虑上述方面以及控制器运算速度后,采样周期应尽可能小,以便能够及时监测并调整舱内空气温度。
综上分析,为能够及时监测、调整舱内空气温度以及控制方便,采样周期设置为10min。
(3)比例系数
通过实验测试分析,当死区温度取0.2℃,采样周期取10min时,不同比例系数非稳态降温工况舱内空气平均温度变化曲线如图7所示。
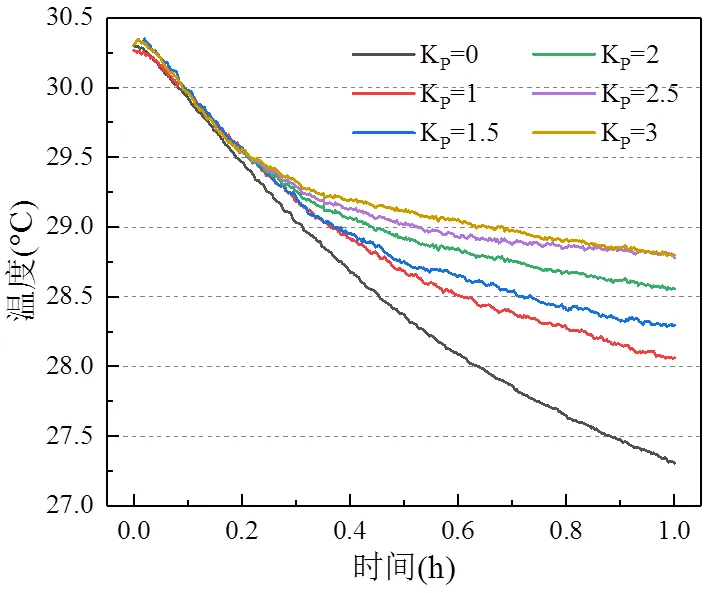
图7 不同比例系数舱温变化曲线
由图7可知,比例系数取2、2.5、3时,舱内空气平均温度1h变化值均小于2℃,分别约为1.79℃、1.56℃、1.55℃。比例系数取2.5已能够达到比例系数取3时的控制效果且留有0.44℃左右余量,因此本文环控系统比例系数取2.5。
4 结论
本文通过对光学机场跑道异物传感器舱内温度以及环控系统运行参数的实验测试,分析镜头类型、环控系统控制方式及控制参数对舱内温度的影响,得出以下结论:
(1)镜头类型对舱内空气温度变化影响较小,安装a型镜头与b型镜头的舱内空气平均温度稳态变化值差值小于3%。
(2)采用串级调节控制舱内温度,供液温度设置为28℃,压缩机差动范围设置为1℃,主调节器死区温度取0.2℃、采样时间取10min、比例系数取2.5时,可满足环控要求且利于环控系统节能。
[1] 孙立新.跑道FOD检测系统关键技术分析[J].理工学院学报,2010,23(4):494-496.
[2] 王瑾.一种混合制式机场跑道异物探测系统[J].科技视界,2019,(9):16-19.
[3] 隋愿愿.轻小型三线阵航摄仪热控设计[D].长春:中国科学院大学(中国科学院长春光学精密机械与物理研究所),2019.
[4] 樊越.航空相机光机热分析与热控技术研究[D].成都:中国科学院研究生院(光电技术研究所),2013.
[5] 刘乐天.光刻机精密水温控制系统的温控模块设计及其算法研究[D].成都:电子科技大学,2013.
[6] 陈嘉艳,张保平.机场能见度仪光学头部温度控制[J].测控技术,2002,(12):23-25.
[7] 李春林,王贵全,赵振明.某航空相机载荷舱热分析与热设计[J].航天返回与遥感,2014,35(3):76-83.
[8] 刘双富,余南阳.机场跑道异物探测系统光学探测转台温度控制实验研究[J].制冷与空调,2019,33(1):98-102.
[9] 中国气象局气象信息中心气象资料室,清华大学建筑科学技术系.中国建筑热环境分析专用气象数据集[M].北京:中国建筑工业出版社,2005.
[10] 邵裕森,戴先中.过程控制工程(第2版)[M].北京:机械工业出版社,2011.
Experimental Study on the Environmental Control System of theOptical Airport Runway Foreign Object Debris Sensor Cabin
Zhou Yunting1Yu Nanyang1Fan Ruochen2
( 1.School of Mechanical Engineering, Southwest Jiaotong University, Chengdu, 610031;2.The Second Research Institute of CAAC, Chengdu, 610041 )
This paper analyzes the effects of lens type, environmental control system control method and control parameters on cabin temperature through experimental tests on the temperature of the optical sensor cabin of the airport runway foreign object debris detection and the operating parameters of the environment control system. The experimental results show that the effect of the lens type on the steady-state change of the average temperature of the air in the cabin is less than 3%, when the environmental control system adopts cascade adjustment, the liquid supply temperature is set to 28℃, the compressor differential range is set to 1℃,the temperature of the dead zone of the main regulator is 0.2℃, the sampling time is 10min, and the scale factor is 2.5, it can meet the requirements of environmental control and is conducive to energy saving of the environmental control system.
FOD optical detection system; environmental control system; experimental analysis; control strategy
TK124
A
1671-6612(2021)01-027-05
周云霆(1995-),男,在读硕士研究生,E-mail:ftzx1001zyt@163.com
余南阳(1961-),男,博士,教授,E-mail:rhinos@126.com
2020-06-17