舞蹈机器人设计概述*
2021-03-19
安徽三联学院 机械工程学院 安徽 合肥 230601
引言
机器人作为20世纪人类最伟大的发明之一,在机器人的发展与应用过程中机器人技术越来越成熟,如今已经可以代替人类从事危险环境及不适合人类工作环境下工作,使得工厂的生产趋向于自动化发展。舞蹈机器人作为新时代的产物,在未来人类的生活中将逐渐常见,兼具功能与外观,生动有趣的形象,为生活带来无穷乐趣。
机器人主要分为两大类:一类是用于工业技术上的生产制造,从而解放人类劳动力,同时也代替人类进行高危事业保证人类生命安全;另一类用于非制造环境下的特种机器人如服务、医疗、娱乐机器人等。随着机械、计算机、电子等技术的发展,机器人技术也日新月异,机器人技术已被用于军事、医疗及娱乐等行业,舞蹈机器人正是娱乐机器人的一类。
从近几年世界范围内推出的机器人产品来看,舞蹈机器人技术正在向智能化、系统化的方向发展。其发展趋势主要为:结构的模块化和可重构化;控制技术的开放化;PC化和网络化;伺服驱动技术的数字化和分散化。舞蹈机器人在日本、韩国、美国、中国等各个国家都先后有不同程度的发展,尤其是在日本已经有突破性的发展。在舞蹈机器人科技方面,中国还处于萌芽阶段。就中国而言,机器人很少向娱乐行业发展,当我们的舞蹈机器人出现在娱乐舞台上时,必将使娱乐方式更,加时代化、多元化,使娱乐内容更加丰富多彩。
1 设计思路
首先对总体进行分析和设计,确定舞蹈机器人的功能、结构和各项硬件配置。其中机械设计为最主要的环节。舞蹈机器人整体设计分为主体设计、动力系统设计、传动系统设计。如图1所示。主体采用各个单独系统联合控制实现,能够实现人类的各种舞蹈动作,具有臂部与腕部和手部同时也配备足部膝部,能够实现独立的行走过程。各个部位具有单独的动力系统,这样使得动力的传输更加直接切损耗较小[1]。
2 动力系统设计
舞蹈机器人的动力系统主要由舵机、电压较小的直流马达和微小型伺服电机来组成,根据确定的自由度和各个肢体所要表达的动作幅度来却定具体所要选用的动力组成件。
主要动力系统可分为头部、各弯曲关节部位和供其移动的底座三大动力系统构成,其底座要求能够模拟人类独立行走且运动角度在不断的呈现不规律变化故选用单独futabas3003舵机进行控制;该舵机扭力可达4.1千克且为同轴双端输出铜合金齿轮舵机,其结构如图2所示。装有减震防撞轴承,减少摩擦并且完全密封,具有较高的安全性和美观度。其转角可达180°可实现任意角度运动。各关节部位可有伺服电机提供动力,因为伺服电机本身具备发出脉冲功能,所以伺服电机每旋转一个角度都会发出对应数量的脉冲,其转动角度如图3所示。为了确保头部能够具有旋转扭动功能本设计采用电压较小的直流电动马达来为其提供动力,供电方式为间断性瞬间供电以确保可以实现微小扭头及摆头动作[2]。
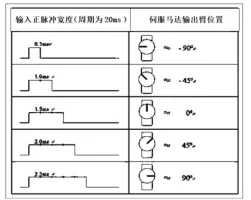
图3 伺服电机脉冲角度
3 传动系统设计
传动系统主要分为直流马达传动、伺服电机传动和舵机传动,直流马达直接与头部肢体相连接通过间断性瞬间供电,马达输出效率直接传递到舞蹈机器人的头部,以带动头部的旋转及摆头动作来达到头部运动的效果,如图4所示。
舞蹈机器人的各个活动关节主要通过伺服电机带动传动机构进行传动,伺服电机装置在舞蹈机器人的身体内部传动距离较长,各动力需要传输到不同的部位,伺服电机的脉冲电流输出稳定的动力通过联轴器与V带传动相连,V带的另一端利用减速器的齿轮啮合作用以小齿轮带动大齿轮达到减速的目的,最后通过联轴器把动力传输到舞蹈机器人的活动关节,电动机传动结构如图5所示。
舞蹈机器人的底座移动部分采用舵机传动系统,由接收机发出讯号给舵机来控制舵机的移动,经过电路板上的IC驱动无核心马达开始转动,透过减速齿轮将动力传输至底座,同时位置检测器送回讯号以判断是否达到定位。舵机与底座之间采用齿轮啮合连接[3]。

图4 动力控制图
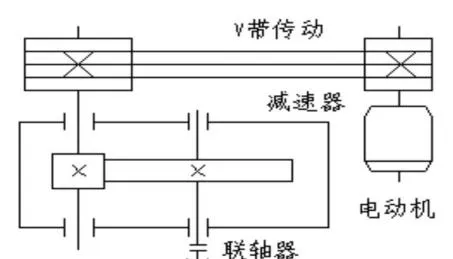
图5 电机传动系统
4 肢体表达设计
舞蹈机器人整体的肢体表达应具有足够的灵活性,本舞蹈机器人具有头部、肩部、肘部、腕部、腰部、膝部、脚部等多个可活动关节来模仿人类的舞蹈动作,各关节控制如图4所示。头部用直流马达控制具有一个自由度一用来完成头部的左右转动;上身躯干一共具有六个自由度,全部由各个部位的伺服电机来驱动,分别为左右肩部两个自由度,用来完成肩部手臂的挥动,左右肘部两个自由度,用来完成小手臂的转动,剩下两个自由度为左右手腕的转动,可以很好地模仿舞蹈过程中的甩手动作;腰部由伺服电机驱动,具有一个自由度以实现腰部的转动,可实现舞蹈过程中的扭腰动作;下身躯干一共具有六个自由度,分别为腿部两个自由度来完成抬腿动作,膝部两个自由度来完成下蹲动作,脚部两个自由度来完成自由行走,其中脚步两个自由度由舵机驱动另外四个自由度由伺服电机驱动。舞蹈机器人的整体外观由3D打印模型外壳进行拼接完成,首先在soliddorks软件上进行建模绘制出实际尺寸的外壳3D模型,再由3D打印机进行打印,最后对各个躯干零部件进行组装,将齿轮和各驱动件进行包裹[4]。
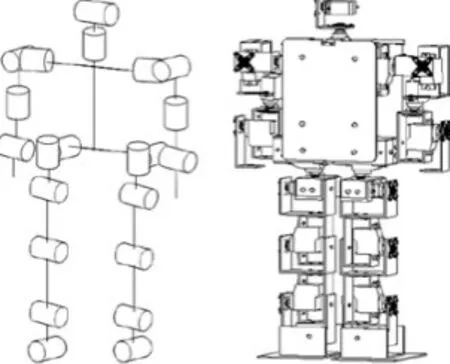
图6 各关节控制图
5 总结
舞蹈机器人的动力系统采用直流马达、伺服电机和舵机分区分机构独立传动;传动系统采用直接传动、齿轮传动、带轮传动等多种传动方式相结合;肢体表达设计采用3D打印技术通过三维软件进行建模能够更好地将舞蹈机器人的外观具体化。
6 结束语
目前市面上舞蹈机器人尚处于探索阶段,大部分舞蹈机器人不能够很好的模仿人体的肢体表达,不能将舞蹈动作完整的做出。本舞蹈机器人采用分级驱动与3D打印外壳,不仅具有机器人的外表还可以准确表达各种舞蹈姿势。经过计算与调整来确定各个部位所需的扭矩及应力,选用不同的驱动件经行驱动,确保舞蹈机器人的活动。市面上采用多级传动分区驱动的舞蹈机器人,大部分机器人都是直接进行传动且提供动力系统单一,大部分舞蹈机器人采用木制或不锈钢外壳而本舞蹈机器人所采用的为3D打印外壳具有足够的安全性和美观性。