汽车驱动防滑控制仿真系统分析研究
2021-03-17崔晓琳
崔晓琳
(烟台汽车工程职业学院 汽车工程系, 山东 烟台 265500)
0 引言
在节能环保的大背景下,具备零排放特性的电动汽车顺应了未来汽车领域的发展趋势受到越来越多的关注,可有效满足能源利用绿色清洁化的发展需求,成为未来重要的交通出行方式,可实现单轮层面力矩控制的分布式驱动电动汽车因具有控制自由度较大、力矩精确度易于控制和响应速度较快等动力学控制方面的优势而成为目前领域内的一项研究热点。驱动轮滑转易在汽车起步或加速时(驱动力突然增加,驱动轮附着力不足)出现,作为确保汽车安全的重要环节之一:汽车驱动防滑控制系统通过转矩的有效分配可使汽车在不同路面及工况下由相对打滑(内外侧车轮的轮速差)引发的车辆失稳现象得到有效避免。基于传统的动力学控制理论对驱动防滑控制算法及驱动力分配策略进行了设计[1]。
1 现状分析
驱动防滑控制系统对于小型未装备液压防抱死系统的电动汽车来说作用重大,处于启动和加速阶段的汽车需使用驱动防滑系统(ASR)在使汽车获得足够的地面驱动力的同时确保车辆及行驶方向的稳定性,主要通过对驱动轮过度滑转问题的有效控制实现。传统汽车大多基于装备的液压防抱死系统(ABS),通过驱动防滑系统综合运用液压制动及发动机输出转调节的方式实现控制过程,汽车如果不安装ABS系统经无法使用驱动防滑系统,着就增加了电动汽车的开发使用成本及整体控制效率。在城市复杂工况下一些未装备液压ABS系统的小型低速电动汽车行驶过程需执行较多的启停与加速操作,对驱动防滑控制系统提出了更高的要求。控制电动机转矩比发动机的响应速度更快,通过控制电动机输出转矩成为实现驱动防滑控制的有效手段。关于汽车驱动防滑控制系统的研究,例如,一种以Lu-Gre轮胎模型(结合轮速信息)为依据构建的四分之一汽车模型,对路面附着系数通过构建的指数滑移观测器完成测量和估计,在此基础上通过驱动转矩的控制实现驱动防滑控制功能,但该方法存在控制算法复杂程度较高的不足;一种结合运用节气门开度调节(使用自适应PID控制算法完成)和干预制动方法的ASR控制算法,并通过硬件在环仿真实验验证了该种ASR的控制效果,但适合传统或混合动力汽车使用,难以满足电动汽车控制需求;一种基于前轮驱动的ASR控制策略(面向前驱电动汽车),但该方法需基于安装液压ABS系统的车辆完成[1]。上述控制系统及算法大多适用于部分特定车辆,难以应用到无ABS的小型电动汽车,为实现此类汽车的高效ASR控制功能,本文基于现有汽车ASR控制算法及策略的研究成果,设计了一种驱动防滑控制算法及控制策略,对电动机输出转矩采用增量PID控制算法进行调节控制,为确保控制信号稳定有序,分别采用路面自动识别方法和基于经验目标值完成对均一路面(指附着系数)和非均一路面的滑转率控制,从而提升车辆整体控制系统的稳定性和可靠性,并建立联合仿真方法(使用Matlab和AVL CRUISE)验证和调整控制策略,得到了较佳的控制效果。
2 驱动防滑控制算法
本文以前驱电动汽车作为研究对象,所构建的驱动防滑控制系统的总体架构,如图1所示。
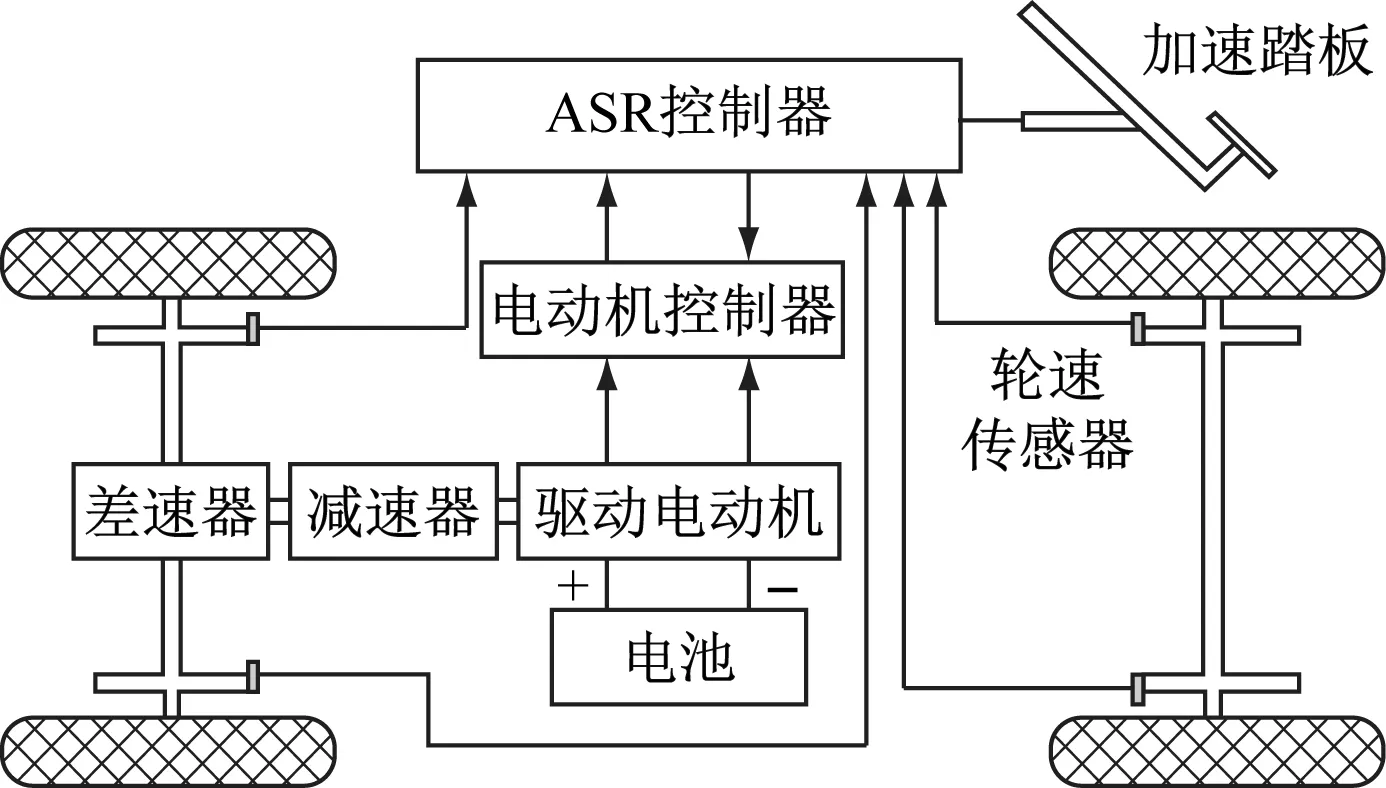
图1 汽车驱动防滑控制系统总体架构示意图
该系统主要驱动防滑控制器、轮速传感器(4个)及电动机控制器,在检测到出现过度滑转的驱动轮时,通过路面自动识别方法确定行驶于均一路面上(此时两侧轮滑转率相差较小)的车辆驱动轮的最佳滑转率;行驶于非均一路面上的判断条件为两侧轮滑转率相差较大,此时采用高选原则和积分分离型PID控制算法完成对电动机驱动转矩的控制过程(以通常在15%~20%范围内的固定经验值作为滑转率),从而实现汽车驱动防滑控制功能[2]。
2.1 前驱电动汽车动力学模型
使用一个永磁同步电动机,对于左右两侧驱动轮的相关属性,假设,两侧驱动轮滚动半径由R1、R2表示(单位m);两侧转动惯量分别由J1、J2表示(单位kg·m2);两侧角加速度由ω1、ω2(单位rad/s2)表示;驱动轮上的驱动力矩分别由Td1、Td2表示(单位N·m);与地面间的纵向摩擦力分别由Ff1、Ff2表示(单位N),两侧驱动轮的动力学模型表达,如式(1)、式(2)。
J1ω1=Td1-Ff1R1
(1)
J2ω2=Td2-Ff2R2
(2)
在具备完全相同的左右两侧转动惯量、滚动半径的情况下,式(1)、式(2)相加,如式(3)。
J(ω1+ω2)=Td1+Td2-(Ff1+Ff2)R
(3)
假设,i1表示主减速器的传动比;传动系的传动效率、等效角加速度和旋转部件的等效转动惯量分别由η、ω0和J0表示;i0表示减速器的传动比,驱动电动机转换到驱动轮的动力学模型,如式(4)。
Tdi0i1η=Td1+Td2+J0ω0
(4)
2.2 PID控制算法的选用
汽车踏板位置在加速时的瞬间变化较大,此时驱动电动机具有很大的初始加速控制信号,调节驱动防滑时使用传统的PID控制算法易出现调节值同目标值差距过大的问题进而导致过大的系统超调,为使控制系统的超调量得到有效降低,本文采用了具备保持积分作用的积分分离型PID控制算法,该控制算法模块在Matlab/Simulink中完成设计,左右两侧驱动轮的滑转率差值由e(sk)表示,然后进行逻辑判断:在目标滑转率同实际滑转率的差值较大的情况下(|e(sk)|超过10%),使用PD控制可在提升系统响应速度的同时有效避免较大超调现象的出现;在滑转率的差值较小的情况下(|e(sk)|小于等于10%)采用PID控制使驱动防滑控制精度得到有效提升。具体通过将一个系数β同PID控制的积分项相乘实现,β取值[3],如式(5)。
(5)
假设,分别由Kp、KI和KD表示比例放大、积分和微分3个系数;k、k-1、k-2分别表示相应时刻;e(k)、e(k-1)、e(k-2)表示相应时刻的设定值同被控制量间的差值,控制量变化的增量Δu(k)的表达,如式(6)。
(6)
2.3 车轮最佳滑转率自动识别
轮胎与路面的利用附着系数由μ(S)表示,各车轮行驶在非均一路面上时,识别与控制最佳滑转率过程需借助多种传感器,为简化小型电动汽车的设计和使用流程、节约成本,设置最佳滑转率为20%;采用相关算法识别汽车行驶于均一路面上的路面最佳滑转率,完成最佳控制过程。C1、C2和C3表示轮胎参数,估计不同路面附着系数表达[4],如式(7)。
μ(S)=C1(1-e-C2S)-C3S
(7)
滑转率与利用附着系数的关系(使用Carsim测试行驶于不同路面下的轮胎获得),如图2所示。

图2 滑转率与利用附着系数的关系
车轮附着系数工作点对应C点,路面最大附着系数点对应点E和G(0.7和0.8)[5]。
C1、C2和C3的值通过对曲线采用非线性最小二乘法完成拟合处理后获取,拟合函数(Matlab工具箱自带)最优解x的表达式,如式(8)。
x=lsqnonlin(@ fun,x0)
(8)
μ和S分别表示附着系数和滑转率,dμ/dS表示变化率,μ在dμ/dS趋近于0时有最大值,对S求导[6],如式(9)。
(9)
求得最佳目标滑转率(对应最大附着系数)S0的计算表达,如式(10)。
(10)
最佳滑转率在不同路面上的求解流程如下。
(1) 通过k时非驱动的后轮速获取参考车速V(k),驱动轮转速ω(k)和V(k)通过计算后轴两车轮中心速度平均值获取,再基于前轮转速完成k时驱动轮滑转率S(k)的计算[6],如式(11)。
S(k)=ω(k)R-V(k)/ω(k)R
(11)
(2) 求取k时利用附着系数μ(k),m表示汽车整车装备质量;hg表示车辆质心高度;FN表示前轮对地面的正压力;L表示车辆轴距;V(k)表示车辆的纵向加速度,如式(12)。
(12)
(3) 利用附着系数和车轮滑转率在检测到车轮滑转时(S超过5%)以0.001 s的步长开始采集,开启ASR控制,在图2中点C工作点识别路面附着系数(最大附着系数及对应的滑转率),据此求得μ(A)和μ(B),计算插值因子[7],如式(13)。
λ=[μ(C)-μ(B)]/[μ(A)-μ(B)]
(13)
μ(E)、μ(G)表示典型路面的峰值附着系数,在最大附着系数为点F时的利用附着系数μ(F),如式(14)。
μ(F)=λ[μ(E)-μ(G)]+μ(G)
(14)
最佳滑转率S0使用同样求取方法。
3 联合仿真测试与结果分析
AVL CRUISE(车辆动力学仿真分析软件)易于同Matlab建立联合仿真实验用于建立汽车模型,据此对所构建的系统进行联合仿真测试,采用的前驱电动汽车的具体参数,如表1所示。
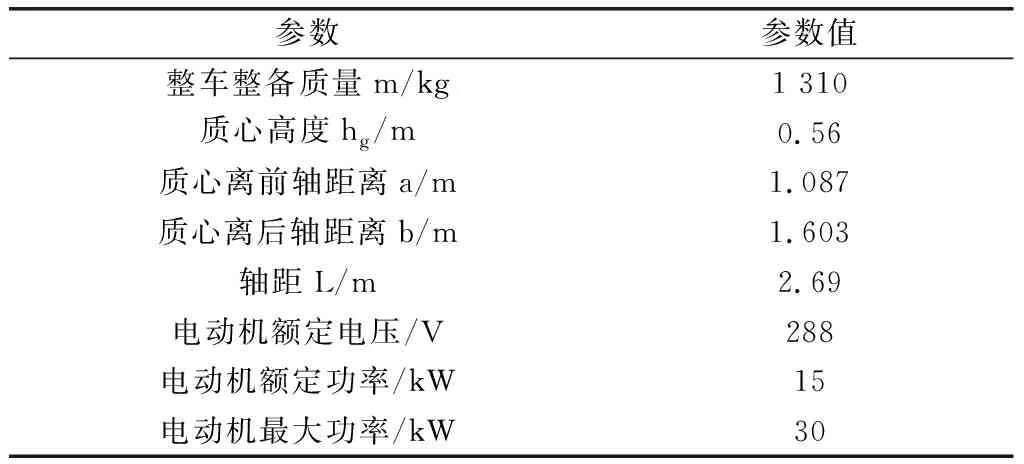
表1 整车参数
据此所构建的联合仿真结构(结合运用API方式),仿真任务:0~60 km/h加速[8],如图3所示。
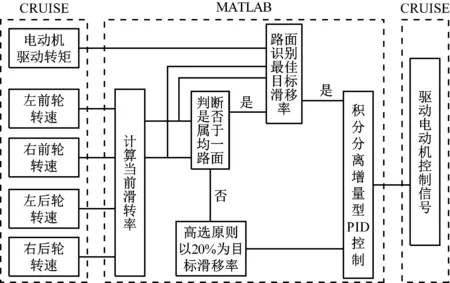
图3 联合仿真结构示意图
分别行驶于低附着的均一、对开、对接和棋盘4种路面,均一路面判断条件为前轴两驱动轮滑转率差<1% 。由低附着均一路面无ASR的仿真结果可知:汽车驱动轮速在急加速起步时会远超过车速,出现车轮急速滑转现象,起步时较小的电动机输出转矩说明电动机利用率较低,限制了车辆的动力性能;低附着均一路面有ASR的仿真实验表明:ASR能够快速完成均一路面的自动识别和判定,并使用最佳滑转率进行控制,汽车驱动轮速起步时逐步上升(略大车速),有效控制了驱动轮滑转率(12.5%左右),滑转率和电动机转矩在起步加速时快速稳定在目标值附近,未出现轮速频繁波动现象。系统输出结果非常稳定。对开路面上有ASR的仿真结果,左右轮速因采用高选控制而呈直线上升,有效避免了驱动轮的过度滑转,如图4所示。
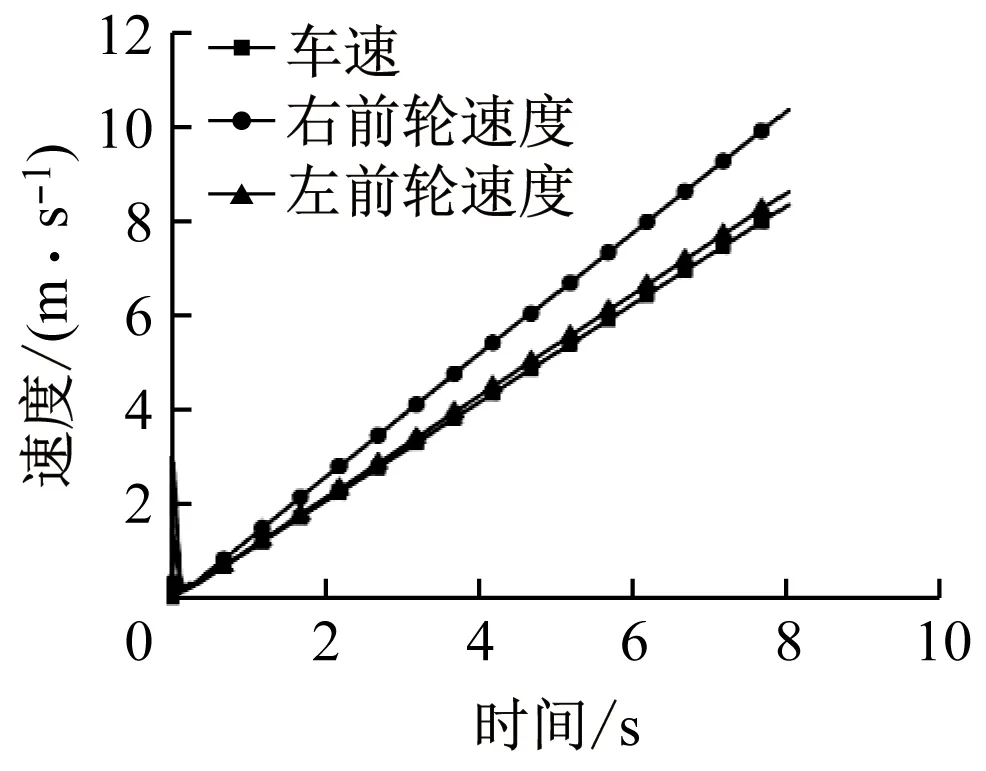
a) 车速和轮速
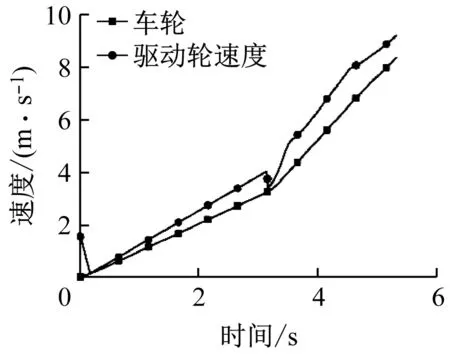
对接路面的ASR仿真结果,如图5所示。
滑转率控制效果较理想,该系统可根据变化的驱动轮滑转率做出快速反应。棋盘路面有ASR的仿真结果,如图6所示。
a) 车速和轮速

a) 车速和轮速
系统能有效识别滑转率并据此做出交替控制。验证了本文所设计的ASR控制系统的有效性,有效避免驱动轮的过度滑转[9]。
4 总结
本文以无液压ABS系统的电动汽车作为研究对象设计了一种汽车驱动防滑控制方案,为达到良好的控制效果,主要通过对驱动电机输出转矩进行控制实现驱动防滑系统功能,在完成路面自动识别的基础上运用积分分离型PID控制算法实现对不同路面下驱动防滑的高效控制过程,使滑转率快速达到设定值,该系统面对突然变化的路面附着系数可完成车轮滑转率的快速准确调节(使其趋近于目标滑转率)。
