基于轨道机动的高轨目标自主感知技术
2021-03-16肖余之陈记争
肖余之 陈记争
基于轨道机动的高轨目标自主感知技术
肖余之1陈记争2
(1 上海航天技术研究院,上海 201109)(2 上海宇航系统工程研究所,上海 201109)
轨道机动可为高轨目标在轨感知提供有利的成像条件,文章在高轨目标感知需求分析的基础上,主要从目标构型识别的角度介绍高轨目标精准感知技术。结合高轨目标的轨道特性和光照特性,在顺光观测的约束条件下,介绍了高轨目标的掠飞和绕飞成像轨道控制方法;针对威胁目标在轨感知,基于目标轨道特性给出了感知相机精准配置方法;针对目标构型精细感知,介绍了目标多方位成像、三维重建技术及实践情况。轨道机动在高轨目标在轨感知中的作用越来越重要,基于轨道机动平台的高轨目标精准感知是未来的重要发展方向。
三维重建 轨道机动 地球同步轨道 空间态势感知
0 引言
地球同步轨道卫星由于其轨道周期与地球自转周期相同,与地球的空间几何关系相对固定,可以为地面用户提供连续、长期的服务。因此,地球同步轨道资源非常宝贵,成为各个国家太空竞争的热点区域。目前,地球同步轨道运行的卫星包括通信卫星、数据中继卫星、电子侦察卫星、导弹预警卫星和气象卫星等,这些卫星构成军事信息网络的重要节点,具有重要的战略意义。此外,地球同步轨道还分布着上千颗废弃卫星、火箭上面级以及一些其他物体,对卫星正常工作构成了一定的威胁。因此,天基态势感知对保证未来航天器安全稳定运行非常重要。
美国等航天强国大力发展高轨抵近成像、探测编目等多种类型的高轨目标态势感知飞行器[1-4]。针对目标成像需求,美国于2006年6月以一箭双星方式发射了微卫星技术试验卫星(MiTEx),主要运行于准地球同步轨道,开展对目标近距离成像技术验证。MiTEx于2009年实现了与失效DSP-23卫星的抵近观测,充分验证了对高轨卫星的成像能力。在此基础上,美国分别于2014年7月和2016年8月以一箭双星方式发射了4颗GSSAP卫星。美国不仅实现了对GEO轨道运行的高价值卫星严密跟踪和监视,而且通过技术侦察和分析,掌握每颗卫星的任务功能、构型配置、性能指标、活动规律等信息,全面了解其意图、过程和效果,强化太空态势的单向透明优势。文献[4]仿真分析表明,GSSAP卫星在距离目标50km时,基本可以识别出目标的形状细节。如果抵近距离更近,目标的成像效果更清晰。此外,在不同观测方位,受太阳光照的影响,目标成像效果差别较大,因此在高轨观测时需要综合考虑太阳光照和观测角度问题,选择合适的位置才能获得较好的成像结果。为了实现对目标抵近以及获得对目标有利观测角度,需要进行轨道机动。
本文在高轨目标轨道特性和光照特性分析的基础上,介绍了高轨目标掠飞和绕飞成像轨道控制方法、感知相机精准配置方法。针对目标构型精细感知,介绍了目标多方位成像、三维重建技术及实践情况。基于轨道机动平台可以实现对高轨目标的精准感知,是空间态势感知未来重要发展方向。
1 高轨目标感知需求分析
高轨目标感知的需求包括获取目标轨道、构型、特定部位精细特征、电磁特性等。
(1)空间目标测定轨
利用天基平台对空间目标测定轨,不受云层等气象条件影响;此外,不受国土面积影响,可对全球目标测定轨。天基定轨包括两种方式,一种方式是根据天基平台的绝对位置速度以及目标的相对位置速度确定目标的轨道,该方式对目标的探测距离相对较近;另一种方式是基于光学相机对目标单星或双星协同测量,采用天文定轨等手段对目标进行高精度定位,通过地面轨道改进获取目标高精度轨道[5-6]。
(2)目标构型获取
目前地基设备难以获取高轨目标的形貌特征,天基平台在轨对目标成像是获取目标形貌的主要手段。通过多角度对目标成像,由图像序列可以获得目标的三维构型,进而可以判断目标的状态,如卫星太阳翼或天线展开状态等。
(3)特定部位精细识别
天基平台在轨近距离对目标特定部位高清晰成像,获取目标的精细特征,可对目标的工作状态或特定部件的工作状态进行评估。例如对故障卫星的故障部位进行高精度清晰成像,评估故障状态,并为进一步的救援操作提供支撑。
(4)目标电磁特性探测
随着各国航天事业的发展,GEO轨道航天器的数量急剧增加,GEO轨道变得越来越拥挤,需要避免临近卫星的无线电信号干扰。通过对目标电磁特性探测,可以掌握GEO轨道带目标的频率、调制方式、波束指向等,丰富目标库内容。
本文重点从目标构型识别的角度介绍高轨目标精准感知技术。
2 GEO目标轨道及光照特性分析
对GEO轨道带目标进行抵近顺光成像侦察,首先需要分析GEO目标的轨道分布、光照特性以及相对运动规律。
2.1 GEO目标轨道分布
根据公开资料,目前在轨正常运行并能够查阅到轨道参数的卫星近600颗,此外,GEO轨道带还运行着上千颗废弃卫星等物体[7-9]。正常运行GEO卫星按照倾角和定点经度的分布情况见图1。轨道倾角小于0.1°的同步轨道卫星比例为64.3%,倾角小于1°的比例超过69%,倾角小于15°的比例约为96.8%。从GEO卫星定点经度的分布看,亚欧大陆和美洲大陆上空分布的卫星数量最多,与这两个区域的战略重要性密切相关。

图1 GEO目标轨道分布
2.2 GEO目标光照特性
太阳在GEO卫星轨道面内投影运动与地面光照类似,1天内太阳光照方向依次为下方、前方(东)、上方、后方(西)、下方。
对于0°倾角的GEO目标,太阳光与目标轨道面夹角不大于23.5°。对于初始轨道为0°倾角的GEO目标,如果轨道倾角不进行控制则发生自由漂移,虽然目标倾角发生了漂移,但太阳光与目标轨道面夹角仍不大于23.5°。
目标初始轨道为标称GEO轨道,在无控状态下轨道倾角以及轨道面和太阳的夹角变化曲线如图2所示,可以看出在54年内目标轨道倾角漂移至15°后又返回到0°;在目标轨道倾角漂移的过程中目标轨道面与太阳光的夹角始终不大于23.5°。

图2 轨道倾角和太阳光照角变化曲线
2.3 GEO目标相对运动分析
1)共面目标相对运动速度慢,在探测范围内停留时间长。以巡视轨道与目标轨道的高度差为50km(GEO-50km)的GEO目标监视为例(如图3所示),计算可得两者的相对速度约5.5m/s,从A点目标进入300km成像范围到G点远离300km范围,共计约30.2h;在200km范围内(BF段)停留的时间约19.7h;在100km范围内(CD段)停留的时间约8.8h。
2)异面目标的相对运动速度快,主要从侧方进入观测视场,倾角相差1°时相对运动速度约为54m/s。对于15°倾角目标相对速度约800m/s,进出300km包络的时长约10min,比共面目标的可探测时间短得多。天基平台主要在目标过赤道面时进行探测,如图4所示。

图3 共面目标的相对运动关系

图4 倾角不为零GEO卫星星下点轨迹
针对GEO轨道带上已知轨道参数的1503个目标,空间目标监视卫星沿GEO-50km轨道漂移,对GEO轨道带目标的探测发现情况进行了仿真。每天进入卫星不同大小包络球内的目标数量如表1所示,可以看出,如果对目标的成像距离为300km,则每天最多可对9个目标进行成像。
表1 每天进入卫星包络球范围的目标数量统计

Tab.1 Targets quantity entering various envelopes
3 基于顺光成像的轨道机动技术
卫星对目标近距离顺光成像的主要轨道机动模式包括掠飞和绕飞。绕飞模式适用于轨道面相近的目标,掠飞模式可适用于异面目标[10-12]。
3.1 自然绕飞成像模式分析
卫星对目标自然绕飞轨迹为椭圆,长半轴位于东西方向(前后方向)、短半轴位于上下方向,长半轴与短半轴的比为2∶1。
GEO轨道自然绕飞周期为1天,太阳视运动周期也为1天,两者周期相等,因此,自然绕飞过程中对目标成像时光照条件基本保持不变。
通过轨道机动建立对目标的绕飞轨道,并且绕飞轨道的初始相位与太阳光线方向一致,则在绕飞成像过程中始终保持对目标顺光(如图5所示)。其中典型时刻太阳光方向及绕飞相位为:
1)当地时间06:00,太阳光从目标前方(东方)照射目标,卫星位于目标的前方,可对目标顺光成像;2)当地时间12:00,太阳光从目标上方照射目标,卫星位于目标的上方,可对目标顺光成像;3)当地时间18:00,太阳光从目标后方(西方)照射目标,卫星位于目标的后方,可对目标顺光成像;4)当地时间00:00,太阳光从目标下方照射目标,卫星位于目标的下方,可对目标顺光成像。

图5 自然绕飞顺光成像
综上所述,可以保证在绕飞一圈时间内,卫星始终对目标顺光成像。可以根据成像相机的最佳光照角将视线方向与太阳光线偏置一定的角度,例如偏置30º。
3.2 掠飞成像模式分析
对于倾角不为0°的GEO目标,其星下点轨迹为“8”字形轨迹。GEO目标约每12h经过赤道面一次,因此,卫星可以在目标经过赤道面附近时对其抵近清晰成像。对异面目标掠飞成像必须在规定的时间到达规定的位置对目标顺光观测。这里规定的时间指目标过赤道附近的时刻,规定的位置指目标指向太阳方向的某位置。如图6所示,当目标过赤道时刻太阳位于后上方时,卫星也需机动到目标的后上方进行成像;当目标过赤道时刻太阳位于前上方时,卫星也需机动到目标的前上方进行成像。

图6 掠飞成像轨道
倾角不为0°的GEO卫星,每天2次经过赤道面,一次经过赤道面时间在当地时间06:00~18:00,另一次经过赤道面时间在18:00~次日06:00。如果巡视轨道位于GEO下方,则优先选择18:00~次日06:00目标经过赤道面时对其进行成像,此时可以从下方或侧下方对目标顺光成像。但考虑到在春分或秋分附近,存在不大于72min的地影时间,因此需要对目标的观测时机进一步细分,具体如图7和表2所示,例如当地时间为23:24~00:36时,太阳位于目标下方(B区),卫星应从下方对目标进行成像;但春分或秋分时,目标处于地影中,此时可见光相机无法对其进行成像。

图7 掠飞时间分区
表2 掠飞时间分区
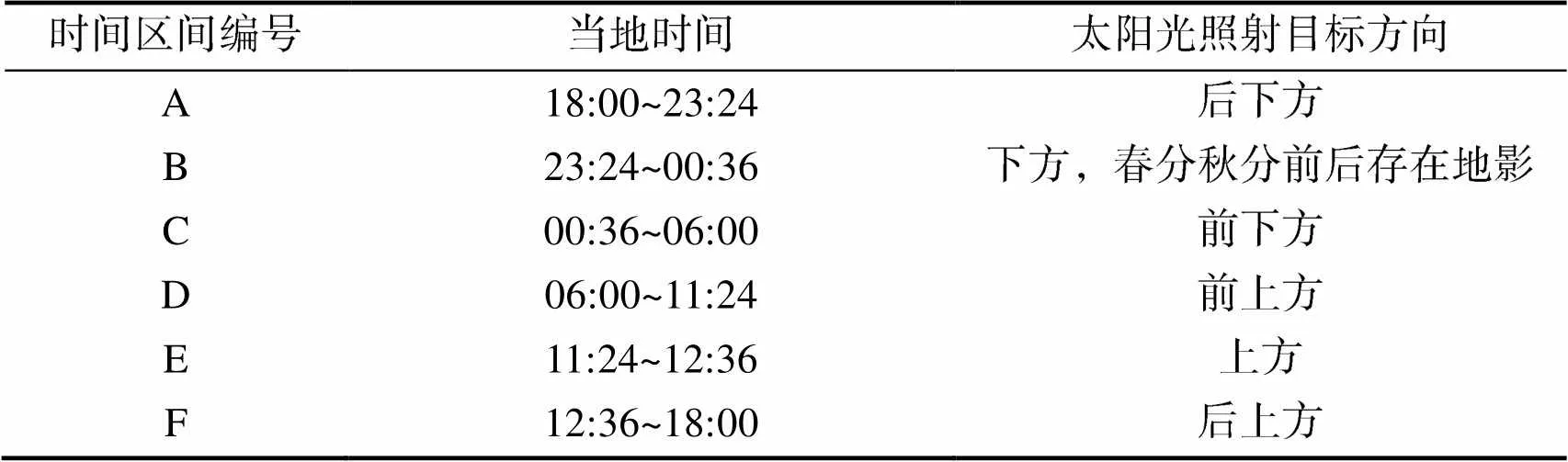
Tab.2 Time intervals for intersection
掠飞成像的主方向为太阳光线方向在赤道面内的投影,此时,视线方向与太阳光线可偏置一定的角度,例如偏置30º。
4 告警相机视场精准配置技术
威胁目标的逼近方向遵循轨道相对运动规律,可以根据目标逼近特点进行告警相机视场的精准配置,实现较小相机视场实现较高发现概率的目的。
4.1 目标逼近特点分析
共面目标主要从前上方和后下方逼近,逼近速度慢,高度差100km时逼近速度约11m/s。针对共面目标重点告警区域要包括前上方和后下方区域,如图8(a)所示。

图8 目标逼近方位
异面目标主要从±侧逼近,逼近速度快,倾角15°目标逼近速度约800m/s。针对异面目标告警区域要包括侧向,即±方向,如图8(b)所示。
4.2 光学告警相机精准配置方案
根据上述分析,提出了一种周向配置的告警方案,视场范围是与平面夹角不大于30°的区域,如图9所示。图9中坐标系为航天器速度与当地水平(Vehicle Velocity and Local Horizontal,VVLH)轨道坐标系,轴指向地心,轴在轨道平面内垂直于轴指向飞行方向,轴与、轴构成右手直角坐标系;方向在轨道平面内与VVLH坐标系轴的夹角为20°(偏向-轴方向为正),为的反方向。告警相机视场区域包括前上方(方向)、右侧(VVLH坐标系轴方向)、后下方(方向)、左侧(VVLH坐标系轴方向)等重点方向。告警相机的视场范围为360°×60°,其视场区域为4π全空域的50%。

图9 告警相机视场
卫星运行在GEO-50km轨道,采用上述告警相机配置方案,相机探测能力取7等星,对GEO轨道带已知轨道参数的1503个目标进行探测告警。运行8年期间目标逼近至卫星100km以内共计2975次,目标抵近至100km时的方位如图10所示。仿真计算表明,可发现目标抵近次数为2831次,即目标发现概率为95%。

图10 目标逼近至100km时的方位
综上所述,从发现目标的角度考虑,可以采用光学告警相机精准配置方案,在4π全空域50%视场的条件下可实现95%的目标发现概率。
5 目标三维重建及验证
卫星在轨对目标成像并下传至地面,地面主要采用基于目标图像序列进行三维重建[13-20]。
5.1 重建方案
卫星在轨对目标绕飞或悬停,并利用成像载荷对目标探测成像,再将成像数据和相对导航信息下传地面,最后在地面进行数据处理完成三维重建与目标运动参数估计,三维重建原理如图11所示。
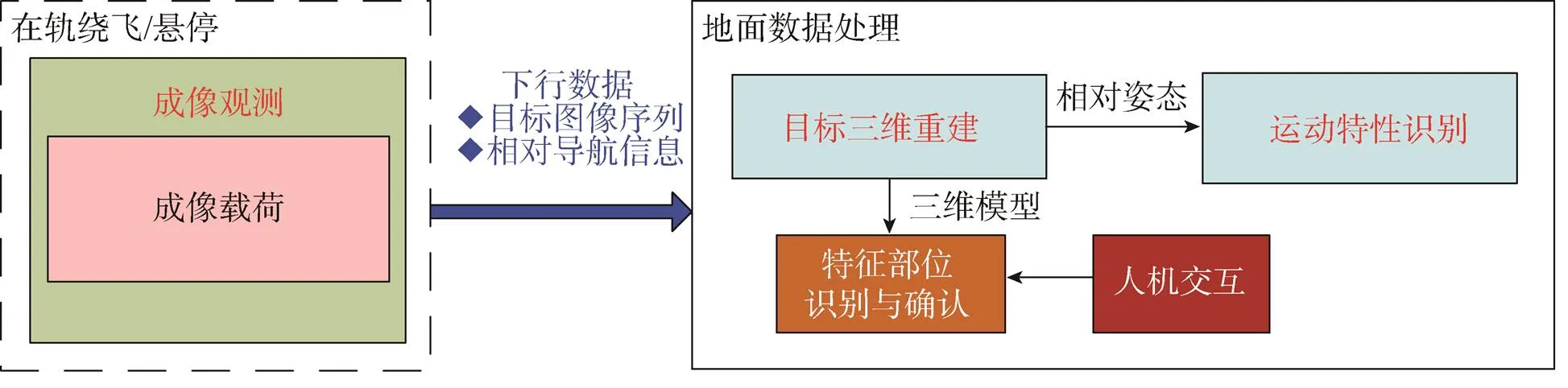
图11 三维重建原理
为实现三维重建,首先要对目标进行多角度成像。对于姿态稳定的目标,通过绕飞方式对其成像,获取多角度图像序列;对于姿态翻滚目标,需通过多点悬停的方式对其成像,获取多角度图像序列。
卫星将目标图像序列和相对导航信息下传至地面,地面经过图像筛选、特征点提取与匹配、稀疏点云重建、稠密点云重建、表面恢复等步骤完成目标三维重建,具体流程如图12所示。

图12 三维重建流程
5.2 地面试验
为了验证三维重建技术,构建了地面空间光学动态特性测试系统,试验系统由目标姿态模拟系统、周视探测车、圆周形的测试轨道、太阳模拟器和中央控制系统等组成(如图13所示)。目标姿态模拟系统用于模拟目标的三轴姿态运动,周视探测车上安装可见光探测相机并在圆周形的测试轨道上运行,圆周形的测试轨道用于模拟卫星和目标的相对轨道运动,太阳模拟器用于模拟空间太阳光照,中央控制系统负责整个试验系统的控制并具备目标三维重建功能。
以角速度为5(°)/s的某翻滚目标为例,利用地面空间光学动态特性测试系统模拟卫星3点悬停对目标成像探测,利用图像序列进行三维重建,得到目标表面各点的三维坐标集,即三维点云。通过重建点云与真实目标比较可得,重建点云精度优于0.05m。

图13 空间光学动态特性测试系统
6 结束语
本文结合高轨目标的轨道特性和光照特性,介绍了高轨目标顺光成像的机动控制、告警相机视场精准配置、目标三维重建及实践情况。卫星通过轨道机动可采用掠飞或绕飞方式对目标顺光抵近成像;根据目标轨道特性,采用光学告警相机精准配置方案,采用4π全空域50%的视场配置下可以实现95%的目标发现概率;卫星在轨对目标绕飞/悬停成像并下传地面进行三维重建,地面试验表明重建点云精度优于0.05m。轨道机动是实现对高轨目标精准感知的重要手段,为目标成像提供需要的距离和光照等条件。轨道机动平台与空间目标监视载荷相结合,实现对目标的自主感知,是未来空间目标态势感知的重要发展方向。
[1] 范志涵, 蔡亚星, 李凤簪. 针对GEO目标的美国天基态势感知技术发展研究[J]. 航天器工程, 2019, 28(6): 87-95. FAN Zhihan, CAI Yaxing, LI Fengzan. Study on Development of American Space-based Situational Awareness Technology for GEO Objects[J]. Spacecraft Engineering, 2019, 28(6): 87-95. (in Chinese)
[2] 蒙波, 黄剑斌, 李志, 等. 美国高轨抵近操作卫星MiTEx飞行任务及启示[J]. 航天器工程, 2014, 23(3): 112-118. MENG Bo, HUANG Jianbin, LI Zhi, et al. Introduction to American Approaching Operation Satellite MiTEx in Geostationary Orbit and Its Inspiration[J]. Spacecraft Engineering, 2014, 23(3): 112-118. (in Chinese)
[3] 宋博. 美国天基空间态势感知系统发展[J]. 国际太空, 2015(12): 13-20. SONG Bo. Development of US Space-based Space Situational Awareness System[J]. Space International, 2015(12): 13-20. (in Chinese)
[4] 刁华飞, 张雅声. 美国高轨态势感知卫星能力分析[J]. 航天电子对抗, 2019, 35(4): 48-51. DIAO Huafei, ZHANG Yasheng. Analysis of US Geosynchronous Situational Awareness Satellite Capability[J]. Aerospace Electronic Warfare, 2019, 35(4): 48-51. (in Chinese)
[5] 程瑞, 林喆, 张艾, 等. 基于相对运动的GEO目标精确成像跟踪方法研究[J]. 航天返回与遥感, 2020, 41(1): 56-63. CHENG Rui, LIN Zhe, ZHANG Ai, et al. Research on Accurate Imaging Tracking Algorithm for GEO Targets Based on Relative Motions[J]. Spacecraft Recovery & Remote Sensing, 2020, 41(1): 56-63. (in Chinese)
[6] 李冬, 易东云, 程洪玮. 天基光学监视的GEO空间目标短弧段定轨方法[J]. 中国空间科学技术, 2011, 31(3): 1-7. LI Dong, YI Dongyun, CHENG Hongwei. Orbit Determination for GEO Objects with Short Arcs of Space-based Optical Observations[J]. Chinese Space Science and Technology, 2011, 31(3): 1-7. (in Chinese)
[7] 李恒年. 地球静止卫星轨道与共位控制技术[M]. 北京: 国防工业出版社, 2010. LI Hengnian. Geostationary Satellite Orbital Analysis and Collocation Strategies[M]. Beijing: National Defense Industry Press, 2010. (in Chinese)
[8] RLOHRER T, FREY S. Classification of Geosynchronous Objects, Issue 18[R]. European Space Agency, European Space Operations Centre, Space Debris Office, 2016.
[9] 梁斌, 徐文福, 李成, 等. 地球静止轨道在轨服务技术研究现状与发展趋势[J]. 宇航学报, 2010, 31(1): 1-13. LIANG Bin, XU Wenfu, LI Cheng, et al. The Status and Prospect of Orbital Servicing in the Geostationary Orbit[J]. Journal of Astronautics, 2010, 31(1): 1-13. (in Chinese)
[10] 袁建平. 航天器轨道机动动力学[M]. 北京: 中国宇航出版社, 2010. YUAN Jianping. Spacecraft Dynamics of Orbital Maneuvers[M]. Beijing: China Astronautic Publishing House, 2010. (in Chinese)
[11] 刘二江. GEO目标接近轨迹规划与控制方法研究[D]. 长沙: 国防科学技术大学, 2016. LIU Erjiang. Research on Trajectory Planning and Control Method of GEO Target Approaching[D]. Changsha: National University of Defense Technology, 2016. (in Chinese)
[12] 刘翔春. 空间目标光学监视卫星轨道设计与任务规划[D]. 长沙: 国防科学技术大学, 2018. LIU Xiangchun. Orbit Design and Task Planning of Optics Surveillance Satellite for Space Objects[D]. Changsha: National University of Defense Technology, 2018. (in Chinese)
[13] 陈凤, 张泽旭, 王盈, 等. 基于序列图像的三维重建方法在空间目标探测识别中的应用研究[J]. 载人航天, 2016, 22(6): 732-736. CHEN Feng, ZHANG Zexu, WANG Ying, et al. Application Study of 3D Reconstruction Using Image Sequences in Space Target Detection and Recognition[J]. Manned Spaceflight, 2016, 22(6): 732-736 (in Chinese)
[14] 彭科举. 基于序列图像的三维重建算法研究[D]. 长沙: 国防科技大学, 2012. PENG Keju. 3D Reconstruction Using Image Sequence[D]. Changsha: National University of Defense Technology, 2012. (in Chinese)
[15] 闫世博. 基于图像的三维重建及网格化算法研究[D]. 上海: 上海交通大学, 2013. YAN Shibo. 3D Reconstruction Based on Images and Meshing Algorithms[D]. Shanghai : Shanghai Jiao Tong University, 2013. (in Chinese)
[16] Carlo Tomasi, Takeo Kanade. Shape and Motion from Image Streams under Orthography: a Factorization Method[J]. International Journal of Computer Vision, 1992, 9(2): 137-154.
[17] KUTULAKOS K N, SEITZ S M. A Theory of Shape by Space Carving[J]. International Journal of Computer Vision, 2000, 38(3): 199-218.
[18] 催德靖. 基于图像序列的运动目标三维重建方法研究[D]. 南昌: 南昌航空大学, 2013. CUI Dejing. Research on the Method of 3D Recognition for the Moving Target Based on Image Sequence[D]. Nanchang: Nanchang Hangkong University, 2013. (in Chinese)
[19] 刘钢, 彭群生, 鲍虎军. 基于图像建模技术研究综述与展望[J]. 计算机辅助设计与图形学学报, 2005, 17(1): 311-326. LIU Gang, PENG Qunsheng, BAO Hujun. Review and Prospect of Image-based Modeling Techniques[J]. Journal of Computer-Aided Design and Computer Graphics, 2005, 17(1): 311-326. (in Chinese)
[20] 唐永鹤. 基于序列图像的空间非合作目标三维重建关键技术研究[D]. 长沙: 国防科学技术大学, 2012. TANG Yonghe. Researches on 3D Reconstruction Technologies for Non-cooperative Space Targets Using Image Sequence[D]. Changsha: National University of Defense Technology, 2012. (in Chinese)
Autonomous Situation Awareness of GEO Objects Based on Orbital Maneuver
XIAO Yuzhi1CHEN Jizheng2
(1 Shanghai Academy of Spaceflight Technology, Shanghai 201109, China)(2 Aerospace System Engineering Shanghai, Shanghai 201109, China)
Orbital maneuver can provide favorable imaging conditions for on-orbit situation awareness of GEO objects. On the basis of the requirement analysis, the paper introduces the autonomous situation awareness of GEO objects from the perspective of configuration identification. With the characteristic of orbit and sunlight, it proposes the control methods of intersection and flying around orbits for the purpose of imaging under direct sunlight. According to the orbit analysis of threat targets, it gives a precise configuration method of warning camera field of view. Finally, it introduces the technologies and practices of multi-angle imaging and three-dimensional reconstruction. Orbital maneuver plays a more and more important role in situation awareness. Autonomous on-orbit situation awareness of GEO objects based on orbital maneuver is one of the important development directions in the future.
three-dimensional reconstruction; orbital maneuver; geosynchronous orbit; space situation awareness
V11
A
1009-8518(2021)01-0001-10
10.3969/j.issn.1009-8518.2021.01.001
肖余之,男,1964年生,1991年获复旦大学计算数学专业硕士学位,研究员,研究方向是航天器总体设计。
陈记争,男,1978年生,2011年获西北工业大学交通运输规划与管理专业博士学位,高级工程师,研究方向是航天飞行动力学与控制。E-mail:jzchen805@163.com。
2021-01-05
肖余之, 陈记争. 基于轨道机动的高轨目标自主感知技术[J]. 航天返回与遥感, 2021, 42(1): 1-10.
XIAO Yuzhi, CHEN Jizheng. Autonomous Situation Awareness of GEO Objects Based on Orbital Maneuver[J]. Spacecraft Recovery & Remote Sensing, 2021, 42(1): 1-10. (in Chinese)
(编辑:夏淑密)
