基于虚拟迭代的某重型商用车驾驶室疲劳分析
2021-03-15孟科委王启栋胡金芳谷先广
孟科委, 王启栋, 胡金芳, 谷先广,2
(1.合肥工业大学 汽车与交通工程学院,安徽 合肥 230009; 2.太航常青汽车安全系统(苏州)股份有限公司,江苏 苏州 215100)
传统的耐久性试验不仅试验周期长,而且成本高昂,以计算机辅助工程(computer aided engineering,CAE)技术为基础的耐久性疲劳仿真分析方法与传统分析方法相比具有周期短、成本低、效率高等优点,已成为汽车结构疲劳分析的重要方法[1-3]。文献[4]采用对前、后车轮单独加载六分力信号获得车身连接处载荷的方法进行客车车身疲劳耐久性能分析,得到理想的分析结果,并与实验结果进行了对比验证;文献[5]利用ADAMS软件建立车架-驾驶室多体模型,应用虚拟迭代法提取得到某轻卡驾驶室悬置处载荷谱,对驾驶室进行疲劳分析,得到驾驶室的疲劳寿命结果,并通过试验验证了仿真结果的正确性;文献[6]以采集的道路载荷谱激励多体动力学模型,提取得到车身连接点载荷,通过有限元疲劳仿真分析,预测整车寿命,仿真分析结果与试验结果一致;文献[7]综合虚拟试验台技术和虚拟迭代技术对乘用车进行车身疲劳寿命分析,分析结果与实验情况基本一致;文献[8]以路试测得的轮心加速度和弹簧变形量等内力载荷为输入,以建立的多体动力学模型为载体,通过虚拟迭代法得到轮心垂向位移谱,驱动多体模型仿真,得到各部件的载荷谱;文献[9]在建立车辆虚拟样机的基础上,将测量得到的真实道路轮心六分力加载到模型上进行激励,仿真分析得到车身及零部件疲劳载荷,结果分析表明,该方法在保证建模和路试采集数据精度的前提下具有较好的效果。
目前应用虚拟迭代技术进行重型商用车零部件疲劳分析的相关研究较少。本文以某重型商用车驾驶室为研究对象,根据试验测得的基本参数建立驾驶室-车架刚柔耦合多体动力学模型;再结合路试采集的目标加速度信号应用虚拟迭代[10-11]技术进行驾驶室疲劳寿命分析,预测出驾驶室潜在的疲劳危险部位,并通过室内台架道路模拟试验验证仿真分析结果的正确性;在此基础上,对危险部件进行结构改进,提高驾驶室的疲劳寿命。
1 目标信号采集
采集准确可靠的目标信号是进行驾驶室疲劳分析的基础和关键。为了确保采集信号的准确性,测试车辆采用挂车、满载40 t进行测试,同时在驾驶室不同部位放置总重量160 kg的沙袋模拟驾驶室的使用载荷,使试验车辆整车整备质量、使用形式与目标车辆实际使用方式保持一致。
测量设备及数据采集设备如图1所示,采集的目标信号有驾驶室与悬置系统连接处的目标加速度信号和驾驶室顶部的参考加速度信号。

图1 路试车辆和测量设备
定远试验场典型强化道路路试情况见表1所列,路试过程中使用GPS设备监测车辆行驶速度。为保证采集数据的准确性,道路测试共进行3次循环测试,对采集的信号进行滤波、去除尖峰值以及重采样等处理,选取相对理想的数据作为最终路试采集的目标信号数据。以卵石路路况为例,采集的驾驶室左前悬置连接处Z向加速度信号如图2所示。
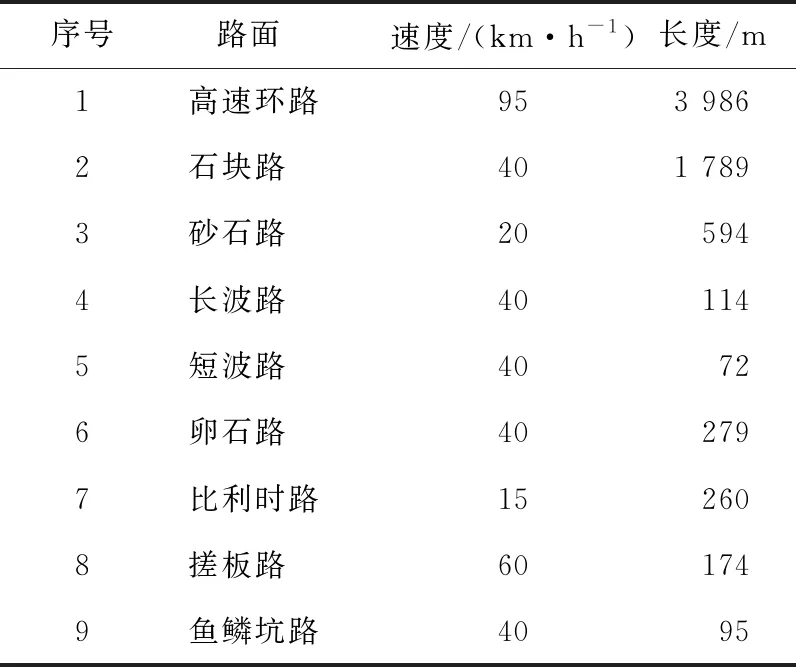
表1 典型路面路试参数
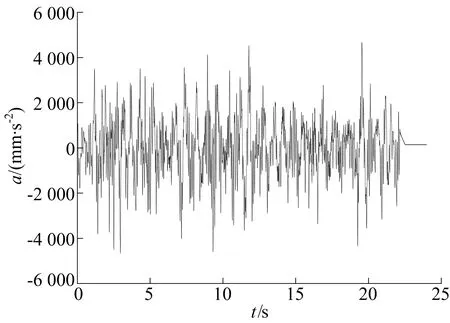
图2 驾驶室左前悬置连接处Z向加速度信号
2 模型建立及目标部位载荷谱提取
2.1 驾驶室-车架刚柔耦合多体动力学模型建立
建立的驾驶室-车架刚柔耦合多体动力学模型的精度对目标载荷谱的正确提取有着显著的影响,为保证所建模型的精度,建模所需的基本参数均是通过试验测试获得的。
为简化模型,在符合力学特性基础上以一个质量集中的刚性小球代替驾驶室进行建模。为模拟实车驾驶室状态,在驾驶室放置总重为160 kg的沙袋模拟驾驶室的使用载荷,测得的驾驶室质心位置见表2所列,驾驶室转动惯量见表3所列。

表2 驾驶室质心位置

表3 驾驶室转动惯量 kg·m2
悬置系统主要由空气弹簧和橡胶衬套组成。空气弹簧具有明显的动态特性,在某一特定工作气压下,它的刚度随着载荷的变化而变化。根据空气弹簧刚度特性曲线在ADAMS软件中编写属性文件进行空气弹簧建模,试验测得的空气弹簧刚度特性曲线如图3所示。
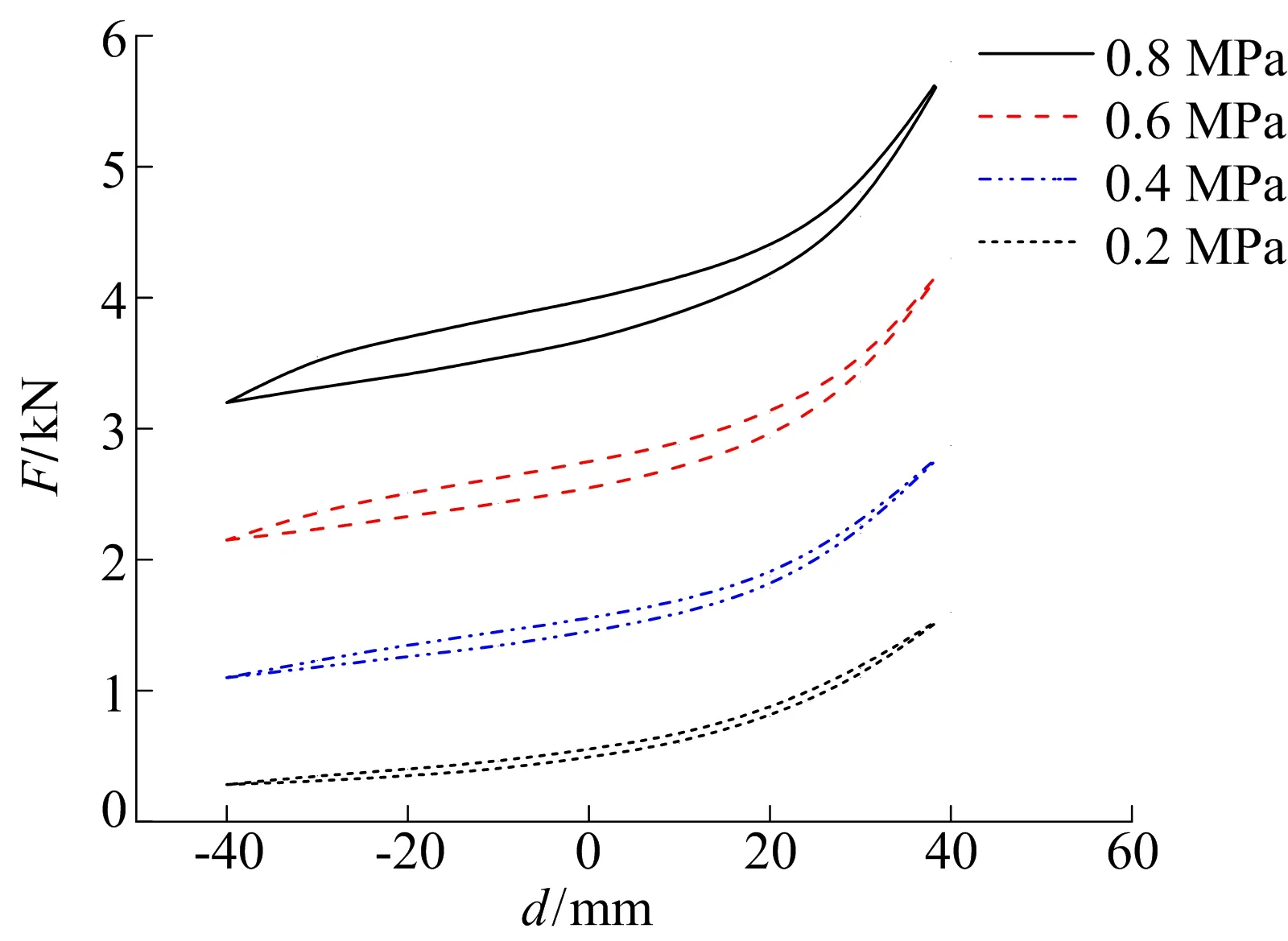
图3 空气弹簧刚度特性曲线
根据试验得到橡胶衬套的位移-力关系曲线,拟合计算得到衬套的刚度、阻尼值,在ADAMS软件中进行赋值完成橡胶衬套建模。以三角臂连接处衬套为例,测得的刚度特性曲线如图4所示。
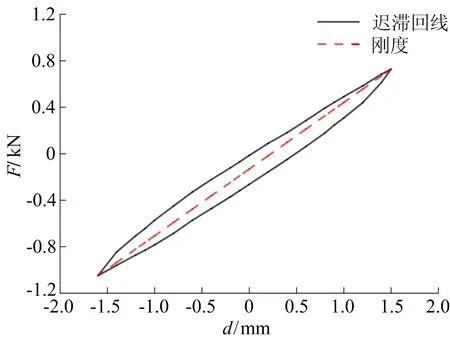
图4 衬套刚度特性曲线
本次分析中的商用车车架尺寸较大,而且驾驶室通过悬置系统主要与车架前段部分相连,对驾驶室动力学响应特性有显著影响的是车架前段部分,因此在对车架建模时进行相应的简化处理,截取车架前段部分进行建模,截取位置与参数测量试验的截取位置保持一致。考虑在实际行驶过程中车架会发生弹性变形,影响驾驶室的动力学响应特性,为了更加精确地建立车架模型,对车架采用柔性体建模。
本文建立的多体动力学模型主要由驾驶室、空气弹簧悬置、橡胶衬套、车架4个部分组成。建立的驾驶室-车架刚柔耦合多体动力学模型如图5所示。
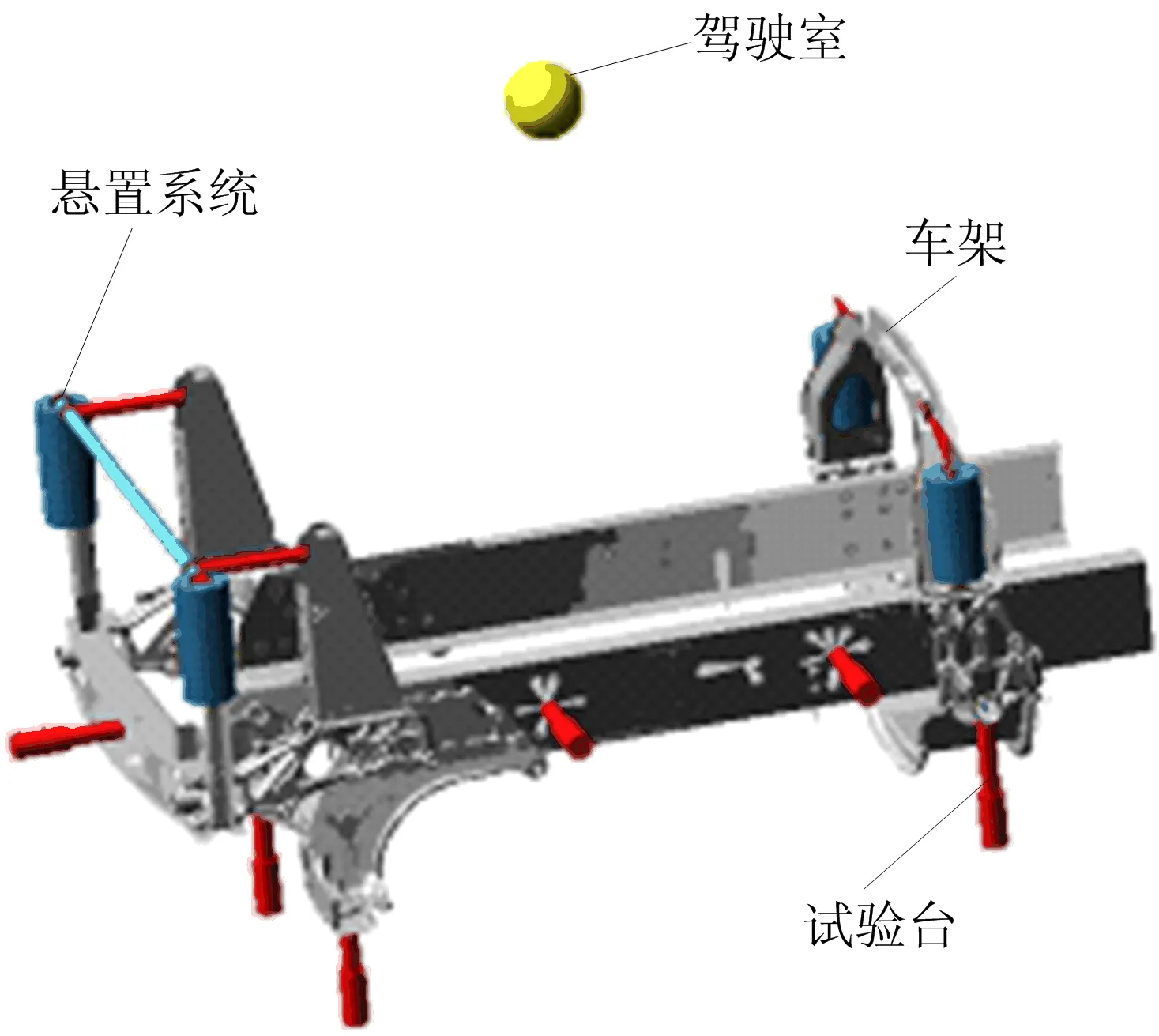
图5 驾驶室-车架刚柔耦合多体动力学模型
在驾驶室与悬置系统连接处(与实车测试时加速度传感器安装位置保持一致)建立4个request作为虚拟迭代的输出响应信号,为模拟驾驶室在实际行驶中的动态响应;在车架垂向和水平方向上施加7个位移驱动,模拟车辆行驶中的俯仰、横摆、跳动等工况。
2.2 目标部位载荷谱提取
2.2.1 虚拟迭代原理
虚拟迭代法根据路试采集的目标信号,通过多体模型迭代出整个系统的驱动信号,虚拟迭代原理如下所述。
(1) 以多体动力学模型作为一个系统,输入白噪声信号u0(s)激励系统产生响应信号y0(s),求得系统的传递函数为:
(1)
进而求出逆传递函数F-1(s)。
(2) 以路试采集的信号作为目标信号yd(s),根据逆传递函数F-1(s)计算初始驱动信号为:
u1(s)=F-1(s)yd(s)
(2)
(3) 初始驱动信号激励多体动力学模型得到响应信号y1(s),因为传递函数不能精确表征多体动力学模型,所以目标信号yd(s)与响应信号y1(s)之间存在一定的误差。
(4) 用修正算法将逆传递函数F-1(s)固定,通过(3)式进行反复迭代,直到响应信号与目标信号之间误差满足精度要求,停止迭代,即
uk+1(s)=uk(s)+F-1(s)[yd(s)-yk(s)]
(3)
其中:yk(s)为第k次迭代响应信号;uk(s)为第k次驱动信号;k为迭代次数。
2.2.2 虚拟迭代提取载荷谱
虚拟迭代结果的正确性判定主要从迭代得到的响应信号和目标信号的时域对比及其相对误差均方根RMS值的变化趋势2个方面进行综合判定。以卵石路路况为例,驾驶室左前悬置处第9次仿真迭代信号与实测信号的时域对比结果如图6所示,迭代信号与实测信号的参数对比见表4所列。
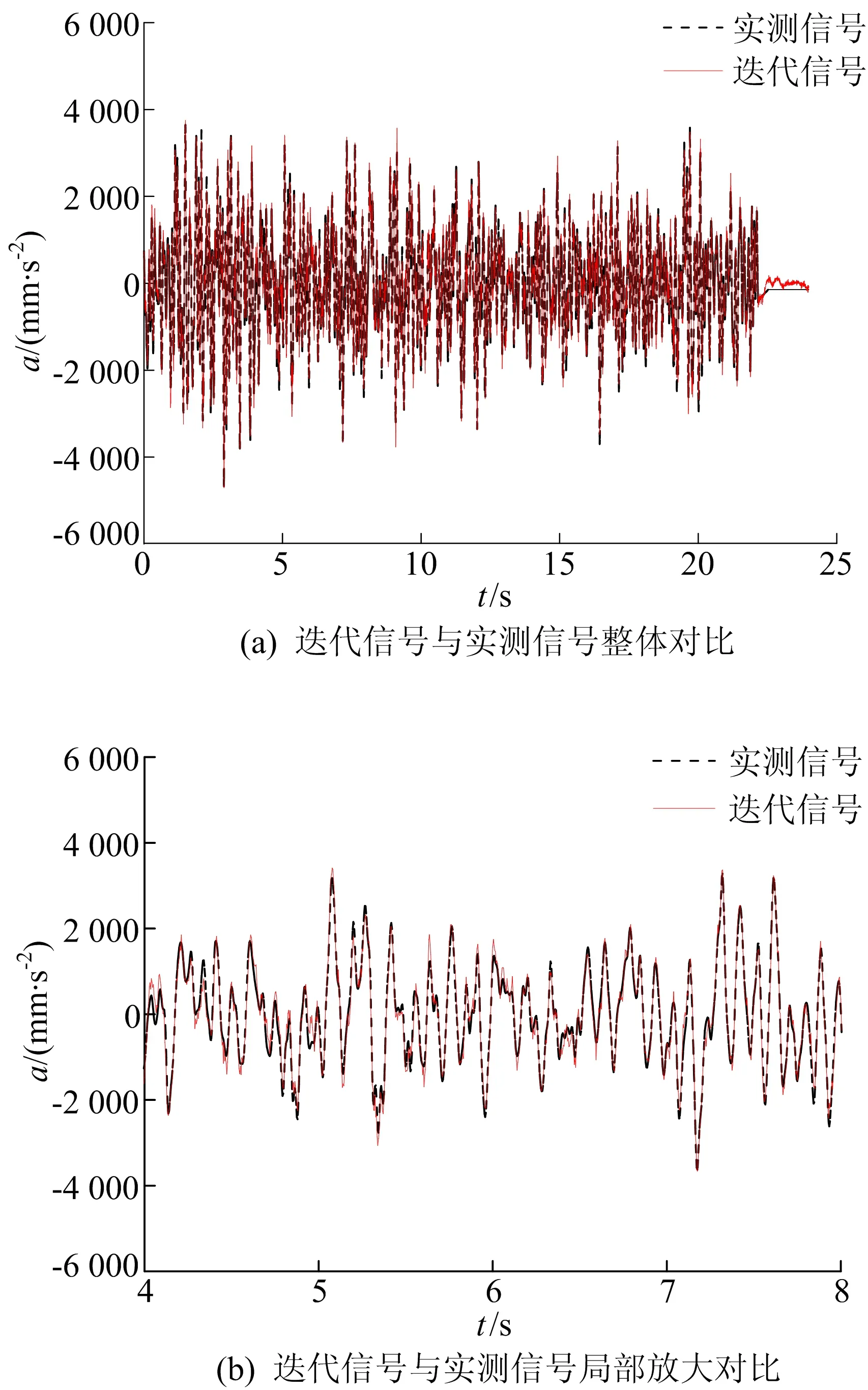
图6 驾驶室左前悬置连接处Z向加速度对比
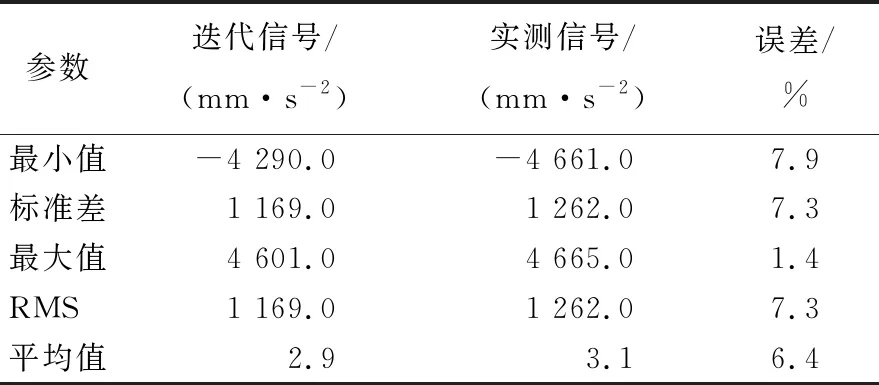
表4 迭代信号与目标信号参数对比
由图6、表4可知,迭代信号与实测信号时域对比的幅值及变化趋势基本一致,参数误差均在10%以内。
迭代过程中RMS值变化曲线如图7所示。从图7可以看出,迭代过程中各通道RMS值一直减小,逐渐趋向于0,在第9次迭代之后达到RMS<0.15,满足委托方RMS<0.2的精度要求,停止迭代。
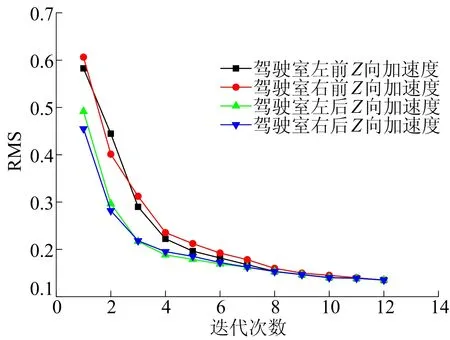
图7 各通道迭代信号与实测信号相对误差均方根值曲线
基于上述虚拟迭代方法迭代得到各种路况下的位移驱动信号,按照路试顺序拼接得到包含全部路试工况的位移驱动信号。使用迭代求得的位移驱动信号激励驾驶室-车架刚柔耦合多体动力学模型进行仿真分析,提取用于驾驶室疲劳分析的载荷谱。
以驾驶室左前悬置连接处为例,分解得到的Z向载荷谱如图8所示。
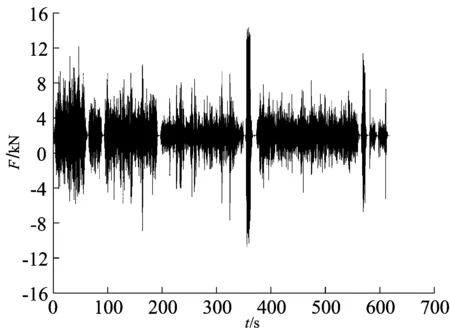
图8 驾驶室左前悬置连接处Z向载荷谱
3 驾驶室疲劳分析
3.1 驾驶室有限元建模
驾驶室有限元模型是疲劳仿真分析的基础。为达到所建模型在结构强度、力学特性和几何特性等方面尽可能与实车保持一致,本文建立全内饰驾驶室有限元模型用于驾驶室疲劳分析。
在HyperMesh软件中对驾驶室有限元模型进行网格划分和焊接处理。采用四边形壳单元网格类型进行模拟,网格尺寸为8 mm,在保留结构轮廓形态的基础上,划分的网格尽可能具有规则的形状,网格划分完成后对网格翘曲度、雅各比、细长比等参数进行检查,对不满足要求的网格进行局部精细划分,提高网格质量,保证应力分析计算精度。焊点采用ACM实体单元进行模拟,焊点直径为6 mm,焊缝采用壳单元进行模拟,螺栓连接采用rbe2刚性单元进行模拟,在螺栓孔周围添加washer避免应力分析时产生应力集中,建立的驾驶室有限元模型如图9所示。应用惯性释放法[12-13]进行单位载荷下的驾驶室应力分析,为驾驶室疲劳分析奠定基础。
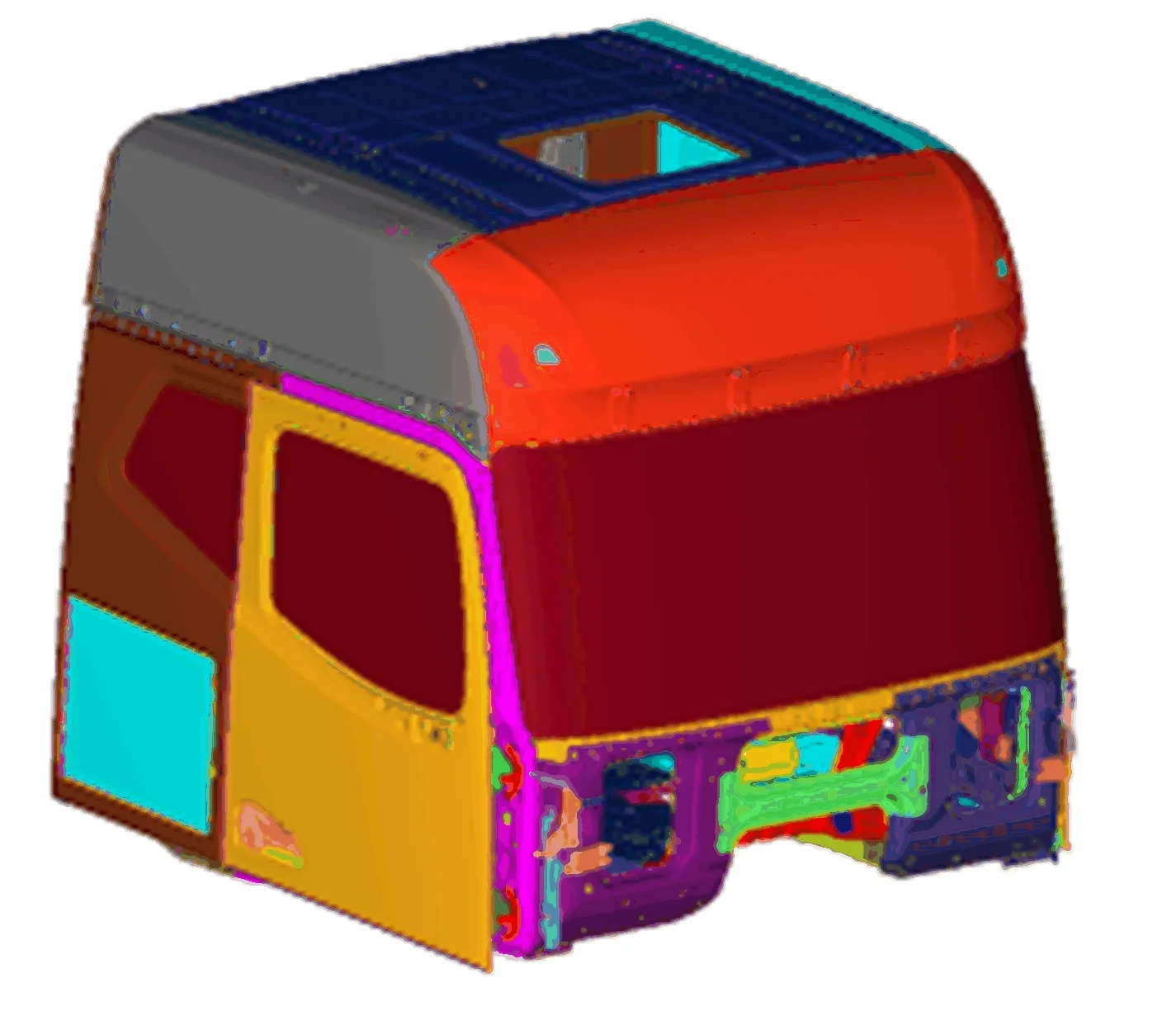
图9 驾驶室有限元模型
3.2 驾驶室疲劳寿命分析
驾驶室在行驶过程中受到的冲击载荷多变,且驾驶室多由钣金件组成,容易发生变形,因此本文采用局部应力-应变法[14]对其进行疲劳分析,由线性累积损伤理论[15]可知,零件在载荷循环作用下产生的损伤累加值D=1时零件发生疲劳破坏。
根据驾驶室单位载荷下的应力分析结果、虚拟迭代提取的载荷谱、驾驶室材料ε-N曲线进行驾驶室疲劳分析,驾驶室疲劳寿命分布云图如图10所示。从图10可以看出,驾驶室疲劳破坏主要集中在前围板。
前围板疲劳寿命云图如图11所示,前围板危险网格单元循环次数见表5所列。
该商用车驾驶室设计寿命里程为强化路面上行驶2.8×104km,试验场强化道路单次行驶里程为7.3 km,需进行3 836次循环。
由图11可知,前围板共有4处寿命不满足设计要求。后期进行的驾驶室室内台架道路模拟试验发现在上述4处附近均出现不同程度的裂纹,仿真疲劳分析结果与道路模拟试验结果见表6所列。
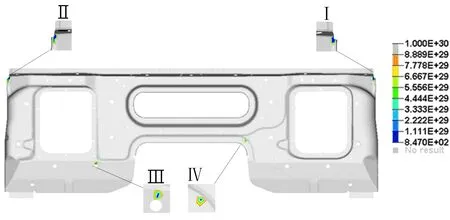
图11 前围板疲劳寿命云图
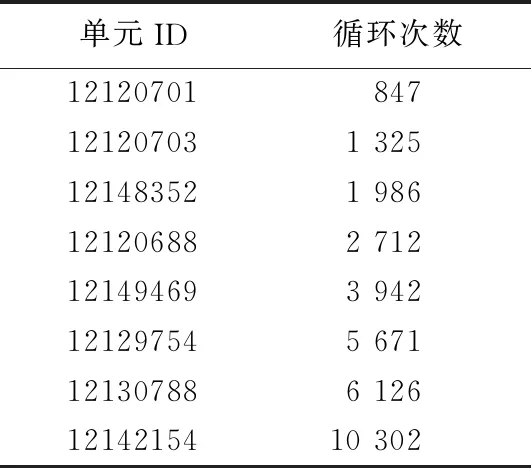
表5 前围板危险网格单元循环次数列表
表6 疲劳破坏处仿真结果和试验结果对比
从表6可以看出,驾驶室出现疲劳破坏位置的仿真寿命与室内台架道路模拟试验寿命相对误差在20%以内,在合理范围内。这进一步验证了驾驶室疲劳仿真分析结果的准确性。
由表5危险网格单元ID和图11前围板疲劳寿命云图可知,前围板疲劳破坏部位主要集中在截面过渡位置和螺栓孔周围。
为提高前围板的疲劳寿命,对危险位置采用增大厚度0.5 mm处理。对重新设计后的模型进行疲劳分析,改进后的前围板寿命云图如图12所示。
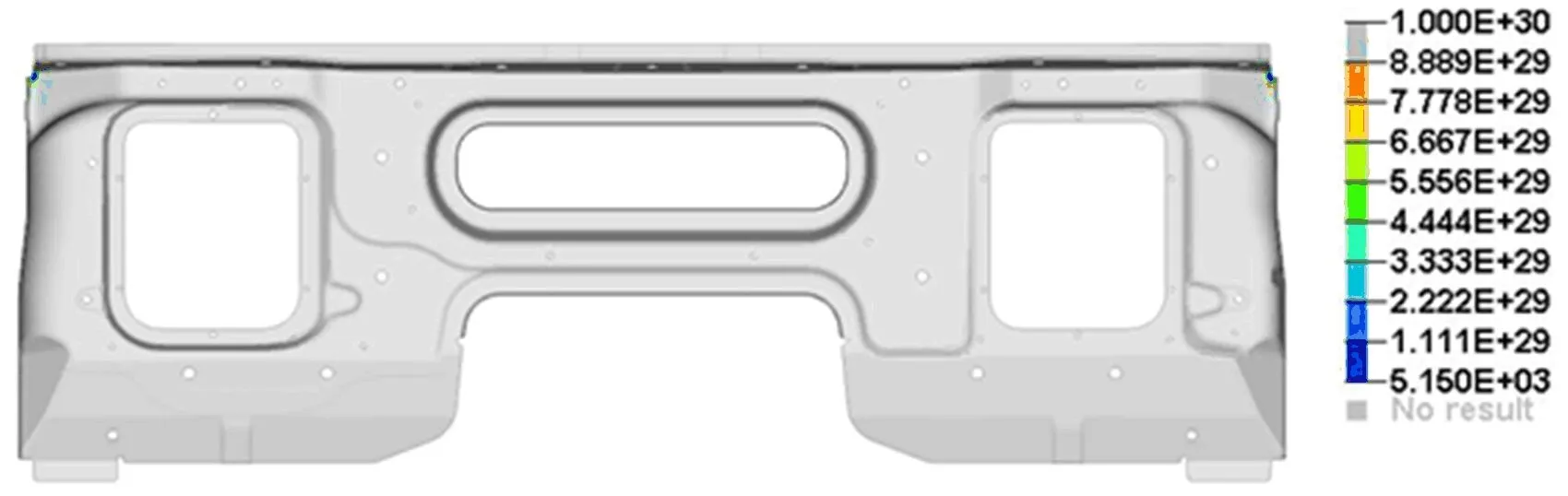
图12 前围板疲劳寿命云图
由图12可知,改进后的前围板最低寿命循环次数为5 150次,折合成强化道路行驶里程为3.7×104km,满足强化道路行驶2.8×104km的设计要求,驾驶室疲劳破坏问题得到解决。
4 结 论
(1) 本文建模所需参数均通过试验获得,提高了建立的驾驶室-车架刚柔耦合多体动力学模型的精度,为虚拟迭代准确提取载荷谱奠定了基础。
(2) 应用虚拟迭代方法成功预测出驾驶室疲劳寿命危险部位出现在前围板上,并通过室内台架道路模拟试验验证了仿真分析结果的正确性,证明了虚拟迭代技术用于重型商用车零部件疲劳分析的可行性和有效性。
(3) 通过对前围板的疲劳破坏部位进行设计参数改进,提高了驾驶室的疲劳寿命,为后期的实车改进提供了依据,对缩减试验周期、降低试验成本具有一定的参考意义。
