基于通信车载平台的可视化集中控制系统的设计
2021-03-14吴林印李韶康嵇凌蒋剑伟何思思徐泽
[吴林印 李韶康 嵇凌 蒋剑伟 何思思 徐泽]
1 引言
随着科学信息技术的不断发展和创新,消息交流和传递也越来越频繁和立体化[1],传统的军事通信车载平台建设已经得到广泛应用。但是传统的军事通信车载平台的架设经常需要30分钟至45分钟才可以形成战斗力。如何能够快速实现通信车载平台的布设、撤收是一个关键,决定了军事装备系统能否快速形成有效的战斗力,智能化的军事通信平台系统建设已经显得尤为重要。因此本文提出了一种基于通信车载平台的可视化集中控制系统的设计方案,将传统通信车载平台的手动调节模式设计成可视化的集中控制系统,所有的操作均通过模块化的软件实现精准操控,在很短的时间内实现通信车载平台的架设和撤收,以满足部队全地形、全要素的快速工作部署及作战训练要素的机动性谋划和布局。
2 可视化集中控制系统的概述
可视化集中控制系统是安装于通信车载平台内,由硬件设备与软件系统两部分组成。硬件设备作为承载平台主要包含集中控制设备、触控终端、车载KVM一体机、辅助配套设备(环境传感器、云台摄像机、车内摄像机、360度全景)。软件系统包含展示端与控制端,具体功能模块则包含可视化模块、视频处理模块、状态监测模块、仿真控制模块、自动化控制模块、数据统计模块。可视化集中控制系统具备强大的接口能力,可无缝对接软硬件设备,能够对其他各系统进行状态监测、自动化控制、可视化显示。
可视化集中控制系统组成如图1所示。

图1 集中控制系统组成
各设备之间通过内部交换机实现数据的互通,设备互联逻辑如图2所示。

图2 集中控制互联关系图
3 可视化集中控制系统的功能设计
通过集中控制系统和传感器系统,实现对整车的电源系统、机电设备、车辆环境、视频监控等的状态监视、故障告警、集中管理等功能,支持车载平台的快速展开和撤收。
可视化集中控制系统具有以下功能:
(1)具备对电源系统的集中监视和控制功能,能够对供电方式进行切换控制,对各设备供电进行功率监测和通断控制,对油机和蓄电池组进行状态监视和参数控制,对整个电源系统进行安全保护及告警;
(2)具备对主要机电设备(包括电动支腿、电动升降杆、天线伺服等)的集中监视和控制功能,能够对机电设备的工作状态进行监视,实现一键展开、一键撤收功能;
(3)具备对车内环境和车外环境的监测功能,通过多种传感器实现温湿度监测、烟雾告警、气象条件监测等功能,能够对强风进行告警并控制天线自动收藏,具备对车内环境的调节功能,能够对空调、换气扇等设备进行集中控制;
(4)具备视频监控功能,能够同时监视车辆内部和车辆周边环境,监控图像具备实时显示与存储回放功能,并支持网络传输;
(5)具备对车辆底盘的监测功能,实现对底盘状态信息的采集和管理;
(6)集控系统软件与Win XP、Win7操作系统兼容。
4 可视化集中控制系统工作流程设计
可视化集中控制系统工作原理框图如图3所示。集中控制通过触摸终端或者KVM实现,受监控设备通过串口/网口接入集中控制服务设备,集控控制服务设备通过网线接入交换机,具体操作如下所示。
(1)触摸终端通过网线连接交换机,进而连接集中控制服务设备;通过触摸终端完成集中控制服务设备对串口连接的业务设备管理与控制;
(2)KVM通过VGA/USB线连接集中控制服务设备,进而通过KVM完成集中控制服务设备对串口连接的业务设备管理与控制。
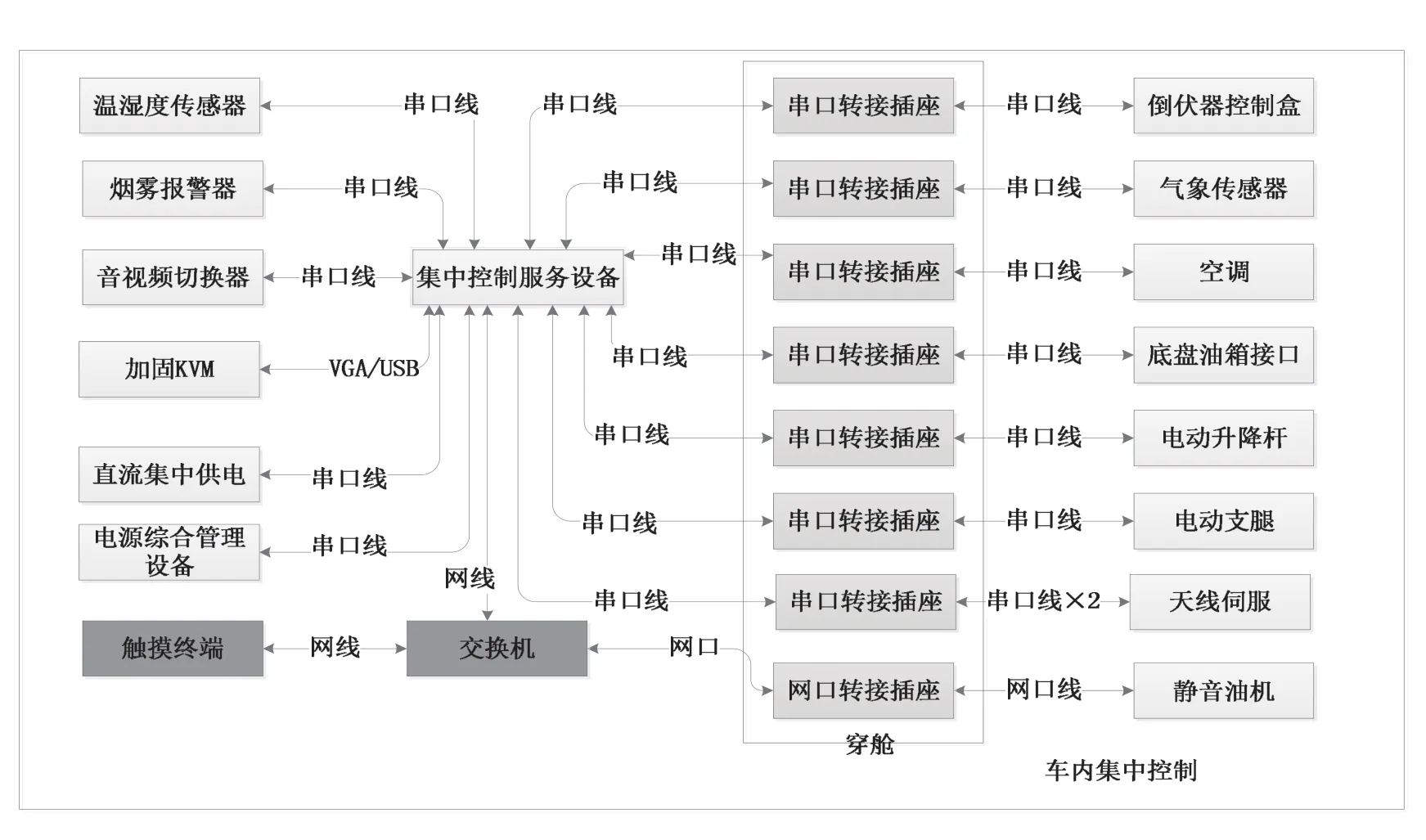
图3 集中控制系统工作原理框图
5 可视化集中控制系统软件设计
5.1 可视化模块
可视化模块通过建立虚拟三维车体模型,更加直观立体的对车内设备进行直观显示与操作。
建立虚拟三维车体模型,可将车体各个三维场景、电器设备工作状态、设备运行情况等信息和资料直观、形象地在三维可视化平台上显示出来,并增加三维立体化的视觉操作功能,对车内设备进行控制。
具体的设计与实现如下所述:
(1)地图基本视窗操作:提供浏览图和鸟瞰图。浏览图是用户操作的主窗口,包括地图放大、缩小、自由缩放、漫游、全幅显示、拖拽移动、点选和矩形区域选择、设计区域快速切换等;
(2)三维显示:可在二维和三维显示模式上进行切换,进入三维模式以后,可以进入车体内部,将管理对象精确到每个模块、设施、设备甚至传感器;
(3)图层管理:对空间数据、对象和模型进行分层管理;
(4)数据处理:包括地图编辑、数据导入导出、地图配准、三维模型加载等等。
可视化场景界面如图4所示。
5.2 视频处理模块
视频处理模块,把音频、视频、图像等信息,可视化的传输到指挥大屏上,使各级人员能够直观的了解作战现场的情况。并且能够通过VSAT卫星通信系统或者地面光纤链路与后方作战指挥中心相连,可以把相应的信息传输到固定指挥中心当中,使指挥中心领导与车载移动指挥领导共同直观的分析现场情况。
视频处理模块可提供全车360°全息影像,辅助车辆驾驶员进行安全驾驶,最大程度降低安全隐患,有效提供车辆作战效率。
360°全息影像由车顶监控摄像机完成图像采集工作,分为前、后、左、右四个采集区域,每个采集区域的摄像机数量根据车辆的物理尺寸而定(此次共配置6个监控摄像机),采集到的四个区域的影像,经过图像处理单元一系列的智能算法处理,最终形成一幅车辆四周的全景俯视图显示在屏幕上,直观地呈现出车辆所处的位置和周边情况。
摄像头全景成像原理如图5所示。
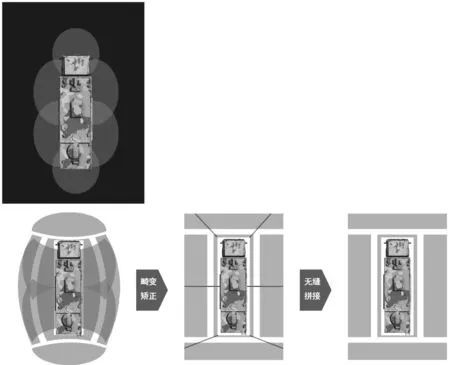
图5 六摄像头全景成像原理图
视频监控及全景视界面如图6所示。
图6 视频监控及全景视界面示意图
视频处理模块具备图像录播功能,能够将系统采集到的音视频信息进行无损录制,提供下载、回放等功能,便于人员进行复盘演练。
5.3 状态监测模块
状态监测模块,能够实时监控设备的运行状态,也可对监测项设置预警值,超出预警值后,提示告警,生成系统日志,对告警进行统计。
信息采集状态检测界面示意图如图7所示。

图7 信息采集状态监测界面示意图
5.4 仿真控制模块
仿真控制模块,操作界面上显示真实设备的仿真图像,用户可以通过点击设备上对应的操作开关进行操作,效果如同真实操作设备,所见即所得。
仿真控制界面示意图如图8所示。

图8 仿真控制示界面示意图
5.5 自动化控制模块
自动化控制模块,其主要目的是让车内环境监测设备能够根据预先设定的数值进行自动化的工作,如车内温度监测设备此时达到空调系统的设定值,此时空调系统自动打开。
自动化控制模块具备对车体及周边环境监测、车内设备监控等功能,并按当下指挥作战的要求对车体机电设备进行联动控制,战时提高了移动指挥车的综合保障能力;平时提高了对指挥所机电设备使用、维护的一体化管理服务水平。
指挥车内部环境监测,通过安装温度、湿度、空气质量、灾情等环境监测传感器,配置传感信息融合处理设备和环境监测智能化管理软件,集成到可视化系统中。
自动化控制界面示意图如图9所示。

图9 自动化控制界面示意图
5.6 数据统计模块
数据统计模块,能够收集各类设备采集的环境参数、设备参数,并通过折线图、柱形图、图表等丰富的方式展现,使用户能够对环境参数、设备运行的情况一目了然,也能通过历史数据分析了解设备运行状况。
在网络链路通畅时,能够将关键数据进行上报回传,有助于权限更高的用户对车辆进行统一监测,能够查看车辆状态。
数据统计界面示意图如图10所示。
图10 数据统计界面示意图
6 结束语
本方案是基于通信车载平台设计的可视化集中控制系统,采用了模块化设计理念,并具有完全自主可控能力。不但系统的硬件平台具有丰富的接口类型,能够保证后期功能的扩展;同时可视化集中控制系统还采用B/S和C/S混合模式搭建,既可以在服务器本机进行操作控制,也可以利用触控平板实现控制,通过图形化操作界面、触摸式控制,使系统操作更便捷。目前该可视化集中控制系统已经成功应用于某车载通信平台上,解决了部队车载通信平台架设和撤收缓慢的问题,可视化的操作满足了部队智能化需求,得到了用户的广泛好评。