降水-雾过程毫米波雷达探测分析*
2021-03-13岑炬辉唐世浩胡利军涂小萍姚日升
岑炬辉 唐世浩 胡利军,3 涂小萍 姚日升,3
1 宁波市气象局,宁波 315012 2 国家卫星气象中心,北京 100081 3 浙江省气象信息网络中心,杭州 310017
提 要: 运用毫米波雷达探测对2017年4月15日夜间造成低能见度天气的降水-雾过程进行了特征分析。水平分布特征分析得出该降水-雾过程空间尺度约为15 km,雷达回波强度范围为-20 ~25 dBz。对该过程的垂直结构进行分析后显示,此过程经过时,近地面经历了由降水到雾的一系列转变过程。对雷达径向速度的分析显示过程的主体结构较稳定,边缘区域对主体区域进行补偿,使过程维持发展。地面能见度观测站观测的能见度在过程接近时开始下降,并在过程即将离开时达到最低,在过程离开一段时间后能见度恢复,并且过程经过时在毫米波雷达扫描区域未观测到有效降水。根据经验公式较好地模拟了此过程中低空雷达反射率强度和近地面能见度之间的关系,具体公式为Vis=2.283Z-0.121。
引 言
雾是指发生在低层大气的一种凝结现象,是悬浮于大气边界层中的大量水滴或冰晶,使大气水平能见度小于1 000 m的危险性天气现象。海雾是指在海洋的影响下,在海上、岛屿或沿海地区形成的雾(王彬华,1983;周福等,2015)。统计研究表明,雾的类型、垂直结构及产生机理非常复杂,与辐射、天气过程、边界层结构、下垫面状况、气溶胶含量等都密切相关(郭丽君和郭学良,2016)。在20世纪早期的研究中,根据雾的形成机制和相关天气情况将其分为11类(Willett,1928;Byers,1959)。王彬华(1983)根据海雾的性质、出现海区和季节将其分为4类:平流雾、混合雾、辐射雾和地形雾。Tardif and Rasmussen(2007)分析纽约地区20年的历史资料,在分类条件中加入云底高度、云量和降水等信息,根据成因将雾分为5类。除了常见的辐射雾和平流雾外,还有降水雾、蒸发雾和云接地雾。降水雾通常具有云雾共存的结构特征,在层云接地过程中,云顶辐射降温引起云内不稳定,冷却的空气和云滴以湍流涡动的形式向下传输,云底之下蒸发的水汽在环境作用下冷却凝结导致层云接地(Oliver et al,1978;Pilié et al,1979)。研究显示,降水雾发生时通常会伴随着持续性的弱降水或者毛毛雨,使云底高度逐渐降低最终到达地面(Tardif and Rasmussen,2008)。在弱降水之后,降水的蒸发加湿了低层大气并达到饱和状态,可能会产生浓雾(Westcott and Kristovich,2009)。
海雾所造成的能见度降低会直接影响海上交通运输、捕捞、船舶进出港和沿岸地区的日常交通(张舒婷等,2013),还会加剧沿岸空气污染,危害人体健康,腐蚀建筑物,影响沿海农业生产,引发电网雾闪事件,引起供电中断,电力输送瘫痪等各种社会生产活动,是典型的自然灾害(Niu et al,2010)。由于海雾物理机制和过程的复杂性,目前对海雾的认识还很不充分,预报准确率亟待提高(Lewis et al,2004;Edson et al,2007),因此对海雾的研究具有很高的理论和应用价值。
雾的结构不仅受局地气象要素变化的影响,还受平流、降水、低云和天气系统的影响(郭丽君和郭学良,2016)。传统的原位观测手段,是借助气象铁塔或系留气艇获取温湿廓线,以揭示产生雾的边界层结构(Fuzzi et al,1992;1998;吴彬贵等,2010)。运用原位观测方式进行雾的结构研究,因为时间分辨率和空间覆盖度的问题,很难直接获取雾的结构特征。近年来,随着遥感技术的不断进步,主动遥感设备也开始应用到雾的垂直结构研究中。通常情况下云雾粒子的半径不会超过20 μm,传统的降水雷达(厘米波雷达)无法对此进行有效观测,毫米波雷达以对雾滴更敏感和大气衰减较弱这两个优势被用来对雾进行观测。雾对毫米波雷达信号的散射和吸收可以通过米散射理论进行计算(Li et al,2014)。在美国等发达国家,毫米波云雷达技术已经较为成熟。Hamazu et al(2003)利用35 GHz雷达观测海雾,获得了雷达反射率因子的水平和垂直分布特征。Boers et al(2013)用2011年10月至2012年3月在荷兰进行的35 GHz毫米波雷达外场试验,对雷达反射率和能见度之间的关系进行了研究,并在雾的形成和蒸发阶段分别得到了不同的雷达反射率和能见度关系。Li et al(2017)对雷达反射率和能见度之间的多种算法进行了比较,并设计了一种新的能见度估算方法。在国内,毫米波雷达的发展起步较晚。2007年中国气象科学研究院灾害天气国家重点实验室与中国航天研究二院第二十三研究所联合研发出具有多普勒和极化功能的8.6 mm波雷达,并且于2008年5—9月成功进行了外场试验。数据分析表明,该雷达能够有效探测到层积云、高层云、台风外围深对流云等典型云系(刘黎平等,2009)。此后,该雷达又为融化层亮带特征(王德旺等,2012),冻雨降雪微物理和动力特征(王柳柳等,2017),云中水成物分布特征(朱怡杰等,2019)等方面的研究提供了帮助。2013年安徽四创电子有限公司研制了一台W波段双极化云雷达,并进行了云物理参数的初步反演(吴举秀等,2013)。近几年随着国内毫米波雷达技术的发展,船载(胡树贞等,2020)和机载(张佃国等,2020)毫米波雷达也开始运用于云的特征研究当中,同时云回波自动分类技术(杨晓等,2019)也得到了一定发展。
目前,利用毫米波雷达对雾开展相关研究在国内刚刚起步,对于海雾尤其是降水雾的研究更是处于空白状态。本文运用35 GHz毫米波雷达探测和地面能见度观测相结合的方式,对2017年4月15日夜间造成低能见度的降水-雾过程特征进行相关研究,并对低空雷达反射率强度和近地面能见度之间的关系进行了讨论。
1 资 料
文中所用的资料主要包含两个部分:毫米波雷达资料和能见度观测站资料。
1.1 毫米波雷达
毫米波雷达布设在宁波臻德环保科技有限公司所属场地内,工作波段为Ka波段(33.44 GHz±10 MHz),具体参数见表1。该雷达以固定天顶指向的时间高度显示(time height indicator,THI)、平扫显示(plan position indicator,PPI)和高扫显示(range height indicator,RHI)这三种探测显示方式对大气进行观测。利用雾滴、云滴、雨滴等液态水滴对电磁波的散射作用,对15 km径向范围内非降水云、雾和弱降水等进行观测,径向空间分辨率为30 m,波束宽度为0.44°,可实时获取探测范围内雾、云、雨的位置分布、强度、速度、速度谱宽等相关信息。毫米波雷达采用边界层模式和卷云模式(武静雅等,2016)进行分段式探测:探测距离在1.8 km以内采用的是0.2 μs脉冲宽度的边界层探测模式,该模式在距雷达1.5 km处探测能力为-27 dBz;探测距离在1.8 km以外采用的是12 μs脉冲宽度的卷云探测模式,该模式在距雷达5 km处探测能力为-36 dBz。
1.2 能见度观测站
毫米波雷达探测区域,共有7个能见度观测站(以下简称能见度站)。其中宁波地区有3个,分别为大猫岛站、凉帽山岛站和白鹅山礁站,这3个站点均为能见度观测专用站点;舟山地区5个,分别为定海站、金鸡山社区站(简称金鸡山站)、南海学校站、老鼠山屿站和岙山万向石油码头站(简称岙山万向站),这5个站点兼有自动气象要素观测。能见度站的地理位置和毫米波雷达的扫描区域详见图1。
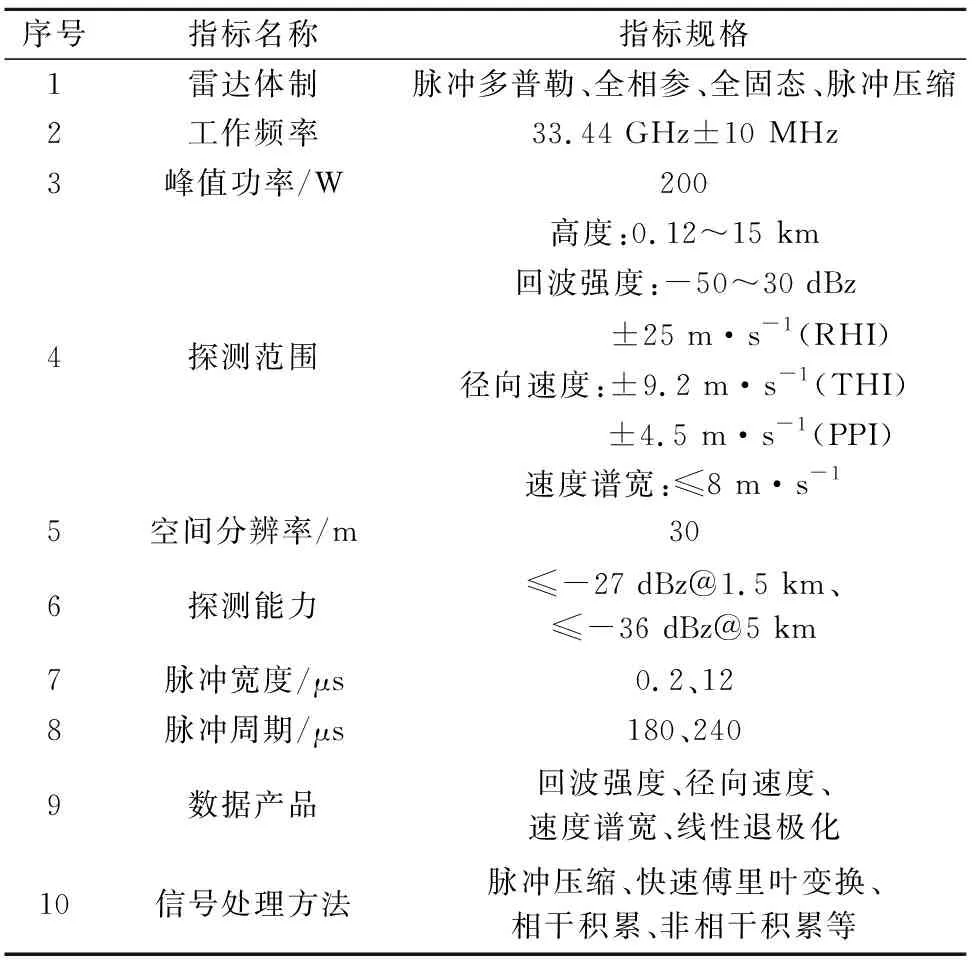
表1 毫米波雷达主要性能参数Table 1 Main parameters of millimeter-wave radar
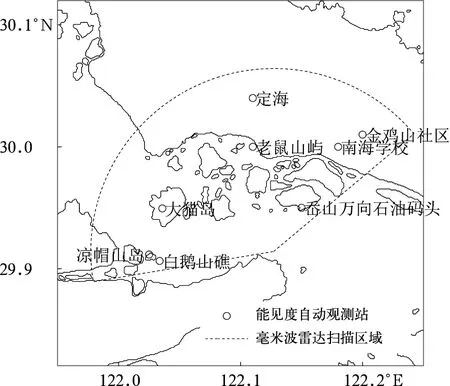
图1 毫米波雷达扫描区域内能见度站分布Fig.1 Distribution of visibility stations within the millimeter-wave radar scanning zone
2 资料分析
2.1 毫米波雷达对降水雾的观测
2017年4月15日22:56—23:50(北京时,下同),宁波东北部沿海海域发生了一次由小型降水过程引发的低能见度天气过程,过程中多个能见度站观测到了低于1 000 m的能见度值,其中个别站点观测到了能见度低于200 m的浓雾(能见度资料详见图6)。毫米波雷达采用三种扫描方式,从不同角度对这一过程的发展变化进行了探测,其结果为此次降水-雾过程的演变特征研究提供了基础。
2.1.1 降水-雾过程雷达回波强度的水平分布特征
2.1.1.1 结构完整性判断
与测雨雷达相比,毫米波雷达最主要的问题就是降水对电磁波的衰减严重,以及探测水平范围较小。降水会对毫米波雷达信号造成非常严重的衰减,因此毫米波雷达一般只探测非降水云、毛毛雨、雾及沙尘暴(仲凌志等,2009)。由于文中所用数据未进行衰减订正,因而对于此次的过程,首先进行了观测结果结构完整性判断。
图2为4月15日22:56—23:50毫米波雷达所获取的8次PPI扫描图像,PPI扫描仰角为3°,回波最远处垂直高度在800 m左右。降水-雾过程处于图2b、2c位置时,毫米波雷达位于过程的东北方向,因而此时对过程北部和东部边界的观测,不会出现衰减,同理从图2f、2g探测的南部和西部边界也不会出现衰减。图2b中凉帽山岛的扫描时间为23:07,图2e中为23:19,图2f中金鸡山的扫描时间为23:38,从图2b~2e的过程移动速度来看,图2f中过程即为图2e中过程继续往东北方向移动所致。对比图2d、2e、2f,可以看到雷达反射率强度分布结构也存在着很强的相似性,而三幅图像是雷达从不同方向对过程进行的扫描,说明了对过程的内部探测是完整的,不存在信号过度衰减的情况。据此分析得出该过程东西长约18 km,南北宽约12 km,毫米波雷达的探测完整覆盖了整个过程。
2.1.1.2 水平分布特征
22:56—23:24(以下简称时段1),毫米波雷达进行了5次PPI扫描,获取了从图2a~2e的5幅扫描图像。从图上依次可以看到过程从雷达扫描区域的西南方向进入,往东北方向移动,途径凉帽山岛站、白鹅山礁站和大猫岛站等站点。在此过程中,凉帽山岛站5次扫描均有雷达回波,白鹅山礁站4次扫描有雷达回波,大猫岛站3次扫描有雷达回波。23:33—23:50(以下简称时段2),扫描获取了3幅PPI图像(图2f~2h)。从图中可以看到此时过程已经离开西部的凉帽山岛站、白鹅山礁站和大猫岛站这3个站点,开始经过老鼠山屿站、南海学校站和金鸡山站这3个站点,并最终从东北方向离开雷达扫描区域。在这过程中,老鼠山屿站1次扫描有回波,南海学校站2次扫描有回波,金鸡山站3次扫描均有回波。其中,由于岙山万向站位置偏南,过程经过此站点的时间跨越了两个时段,时段1的第五次扫描和时段2的第一、第二次扫描均有回波。
将图2a~2h结合起来可以看到,过程强回波中心分散在几片区域,强度在20 dBz左右,短时也有超过25 dBz的区域出现,过程绝大部分区域的回波强度0 dBz以上。从强回波中心往外,雷达反射率强度依次减弱,过程边缘区域雷达反射率强度约为-20 dBz。
2.1.2 降水-雾过程雷达回波强度的垂直分布特征
23:24—23:38,为了对降水-雾过程的垂直结构进行探测,毫米波雷达切换到了RHI和THI扫描模式进行观测。
2.1.2.1 垂直剖面特征
图3是RHI模式4次扫描得到的雷达回波图,其中图3a、3b两图是选择了方位角0°(正北为0°,与风向定义一致,下同)进行垂直扫描,图3c、3d两图是选择了方位角300°进行垂直扫描。根据图1中过程的移动路径推断,在0°方位角进行的扫描穿过了过程的中心区域,300°方位角进行的扫描位于过程后部接近边缘区域。
从对过程中心区域的扫描图上可以看到,反射率较强区域有三个,分别位于过程中部6 km高度附近、3 km高度附近和过程前端区域。其中6 km附近区域和前端区域的雷达反射率强度在15 dBz左右,而在中心3 km附近区域的雷达反射率强度则是在25 dBz左右。研究表明,在冰晶、雪花下落过程中,通过0℃层后,表面开始融化,水凝体的融化及其引起的介电常数、粒子落速、粒子形状和尺寸以及浓度的变化等,使得雷达反射率迅速增大(李铁林等,2010;杨丹丹等,2010;孙晓光等,2011;王德旺等,2012)。因此,可以判断图3a、3b中3 km高度附近25 dBz左右的强回波区域为水凝体的融化区域,同时也可得出此区域正在发生降水。对比图3a、3b可以看到,图3a在中心区域6和3 km高度的两个强回波中心之间存在很强的连续性,此时该区域应为连续性降水,图3b两者之间出现了一条在0 dBz左右的分离带,融化区域也很分散,此时该区域应为零星降水。
对过程后部的扫描图像中,图3c是分为近地面和6 km高度附近两个强回波区域,图3d只有6 km高度附近一个强回波区域。从图3c可以看到,两个强回波区域之间出现了大片的-15 dBz左右强度的弱回波区域,表明此时两个强回波区域已经趋向于分离。此时,下部的强回波区域从3 km高度降为接地,顶部高度在2 km左右,并且雷达反射率强度也降到了15 dBz左右。这时,图上已经不再有水凝体融化带来的强回波,说明已经没有降水发生,开始呈现出上部云层和下部雨雾系统的结构。随后的图3d上,两个高值区域之间分离更加明显,分离带上出现了小于-25 dBz的回波,下部区域的强回波进一步减弱到了0 dBz左右,并出现了强度在-20 ~-10 dBz的区域,呈现出雾区特征。

图2 2017年4月15日降水-雾过程经过雷达扫描区域时PPI模式雷达回波强度(a)22:56—23:01,(b)23:01—23:07,(c)23:07—23:13,(d)23:13—23:18,(e)23:18—23:24,(f)23:33—23:38,(g)23:38—23:44,(h)23:44—23:50Fig.2 Scanning images of radar reflectivity in PPI mode with the precipitation-fog process passing through the radar-scanned region on 15 April 2017(a) 22:56-23:01 BT, (b) 23:01-23:07 BT, (c) 23:07-23:13 BT, (d) 23:13-23:18 BT,(e) 23:18-23:24 BT, (f) 23:33-23:38 BT, (g) 23:38-23:44 BT, (h) 23:44-23:50 BT
2.1.2.2 时间演变分析
根据图2、图3、图4中各图扫描时间,可以得出在图3的RHI扫描和图4的THI扫描进行时,降水-雾过程的位置是在图2e和2f之间。因为扫描是依次进行的,所以图3的4次扫描展示了降水-雾过程从连续降水到零星降水,再到降水停止在近地面形成雨雾系统这一系列垂直结构变化过程。图4的THI扫描是紧接着图3d进行的,可以看到在图中下部雨雾系统接近地面部分回波强度在-15 dBz左右(此强度一般出现于成熟雾区)的区域,随着时间在不断地扩大,其厚度在不到1 min的时间里从近400 m发展到了近800 m,说明雾区在迅速发展成熟。从图4中还可以看到雷达回波在高度1.8 km 附近出现了缝隙,数据分析得到缝隙下边界附近的回波强度值是在-30 dBz左右。从1.1节的雷达探测能力数据可知,在边界层模式下雷达的探测能力是小于-27 dBz的,因而推断此缝隙的形成是由于回波强度弱于雷达的探测能力,此缝隙实际上是低值带而非空值带。从图4还可以得到,高度在2 km附近的低值带(即2 km高度附近绿色区域加上缝隙),是在不断地变厚,说明上部云层和下部雨雾系统的联系在不断减弱。
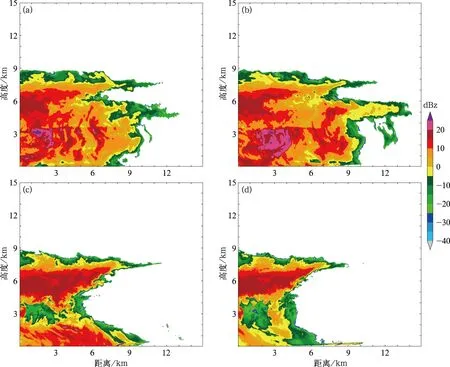
图3 2017年4月15日降水-雾过程经过雷达扫描区域时RHI模式雷达回波强度(a)方位角0°,23:24—23:26,(b)方位角0°,23:26—23:28,(c)方位角300°,23:28—23:29,(d)方位角300°,23:29—23:31Fig.3 Radar reflectivity in RHI mode with the precipitation-fog process passing through the radar-scanned region during 23:24-23:31 BT 15 April 2017 (a) azimuth angle 0°, 23:24-23:26 BT; (b) azimuth angle 0°, 23:26-23:28 BT; (c) azimuth angle 300°, 23:28-23:29 BT; (d) azimuth angle 300°, 23:29-23:31 BT
综上所述,可以得到此过程的发展经历了连续降水到零星降水,再到降水停止逐渐形成上部云层和下部雨雾系统,最后两者逐渐分离,地面雨雾系统进一步发展形成雾这一系列变化。
2.1.3 降水-雾过程雷达径向速度的特征分析
根据 2.1.1.1节的分析,降水-雾过程整体往东北方向移动,结合图2e和图5a可以看到在过程主体部分,存在西北—东南走向的零速度线,在该线的左下侧,径向速度都为负,在该线的东北侧,过程主体部分径向速度都为正,而在过程边缘,存在着大片的负径向速度区(因为径向速度由粒子速度和空气速度两部分构成,在此个例中主要贡献者为粒子速度,因而下文粒子速度也代指径向速度)。这表明过程的主体部分在水平方向上是统一的往东北方向移动,但是过程边缘存在着不少向雷达方向运动的粒子。图5b展示的是过程边缘径向速度的剖面,可以看到在过程边缘,一定高度以上的粒子都明显向雷达方向,即倾斜向下运动。由图4c、4d两幅径向速度(此时也即垂直速度)可见,云中部分区域有较强的垂直运动,甚至出现了速度折叠,而近地面区域垂直速度大都在4 m·s-1以下,平均速度在2~3 m·s-1。综合分析,可以得到过程的主体水平方向运动较统一,均为东北方向,相对运动较少,但是在边缘区域,部分粒子会向主体方向运动;在垂直方向上,主体和边缘均为垂直向下运动,但是最边缘区域不是垂直向下,而是倾向中心向下。因此在整个过程中,边缘区域是在对主体区域不断进行补偿,从而使过程维持发展。
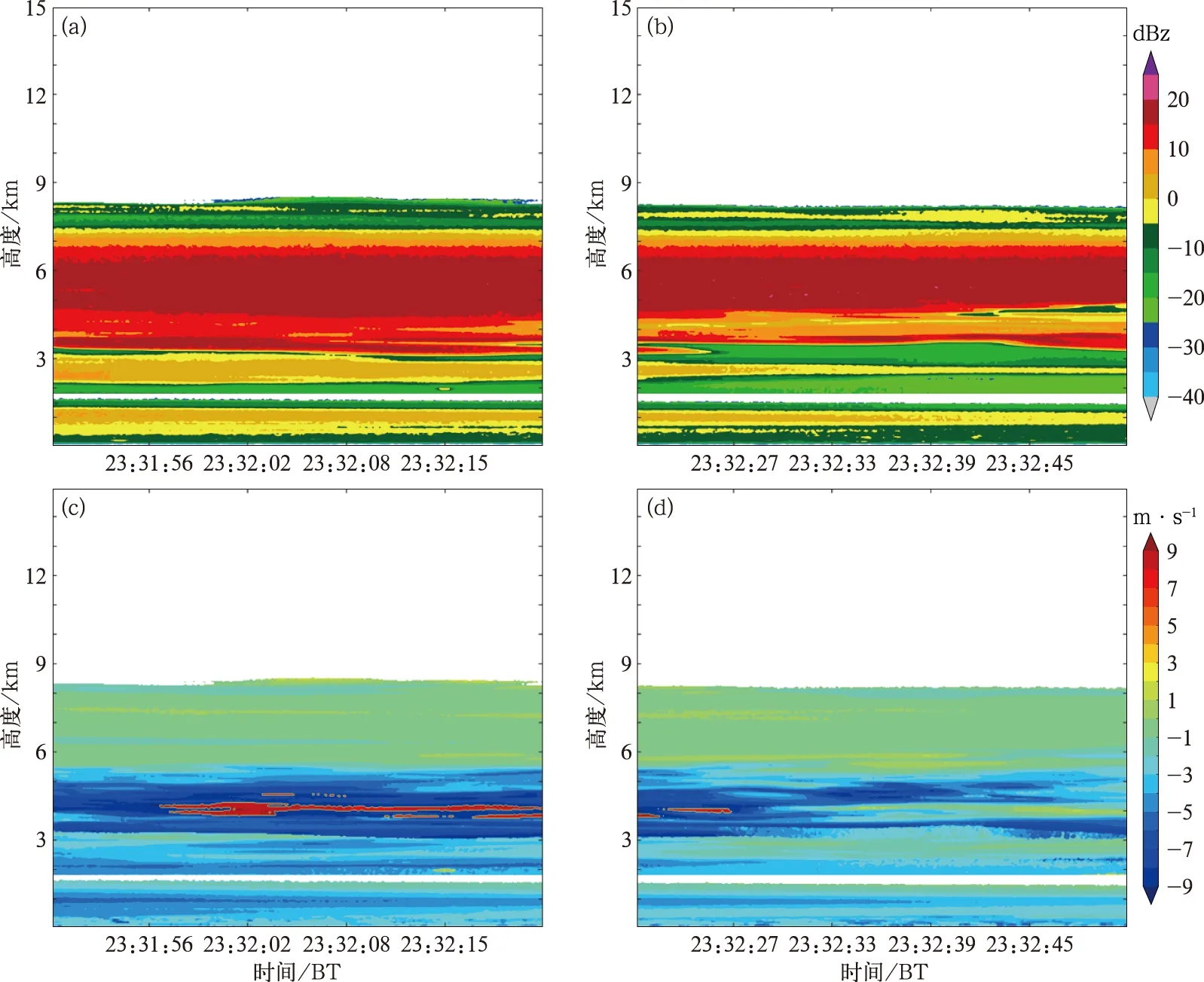
图4 2017年4月15日降水-雾过程经过雷达扫描区域时THI模式雷达回波强度(a,b)和径向速度(c,d)(a,c)23:31:50—23:32:21,(b,d)23:32:21—23:32:52Fig.4 Millimeter-wave radar scanning images of radar reflectivity (a, b) and radial velocity (c, d) in THI mode with the precipitation-fog process passing through the radar-scanned region during (a, c) 23:31:50-23:32:21 BT, (b, d) 23:32:21-23:32:52 BT 15 April 2017
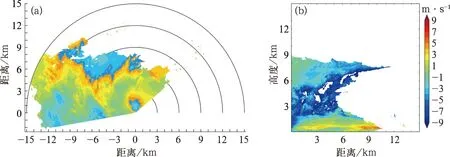
图5 2017年4月15日降水-雾过程经过雷达扫描区域时的典型径向速度(a)PPI扫描,23:18—23:24,(b)RHI扫描,方位角300°,23:28—23:29Fig.5 Typical radial velocity image with the precipitation-fog process passing through the radar-scanned region on 15 April 2017(a) PPI scan during 23:18-23:24 BT, (b) RHI scan during 23:28-23:29 BT at azimuth angle 300°
2.2 能见度站和自动气象站的观测
从2.1.1节的分析可得,在时段1,过程主要影响位于毫米波雷达西面的3个站点:大猫岛站、凉帽山岛站和白鹅山礁站;在时段2,过程主要影响的是毫米波雷达北面的3个站点:金鸡山站、南海学校站、老鼠山屿站;另外过程对岙山万向站的影响跨越了两个时段。受影响时各个站点的能见度变化情况如图6和表2所示。从表2可以看到,受过程影响,各个站点的能见度都出现了大幅度的下降。将图2和图6进行对照,可以得到,站点能见度都是在过程接近时开始下降,在过程即将离开时达到最低(除大猫岛继续下降)。
对过程过境前后毫米波雷达扫描区域及扫描区域外附近区域的自动气象站降水资料进行了统计,结果显示在过程过境的相应时段,毫米波雷达扫描区域内未观测到有效降水,扫描区域外附近区域共观测到4次0.1 mm的有效降水(小干岛23:44,小干岛23:46,大榭南23:48,大榭东00:06),表明此过程主要带来的是雾而非降水。
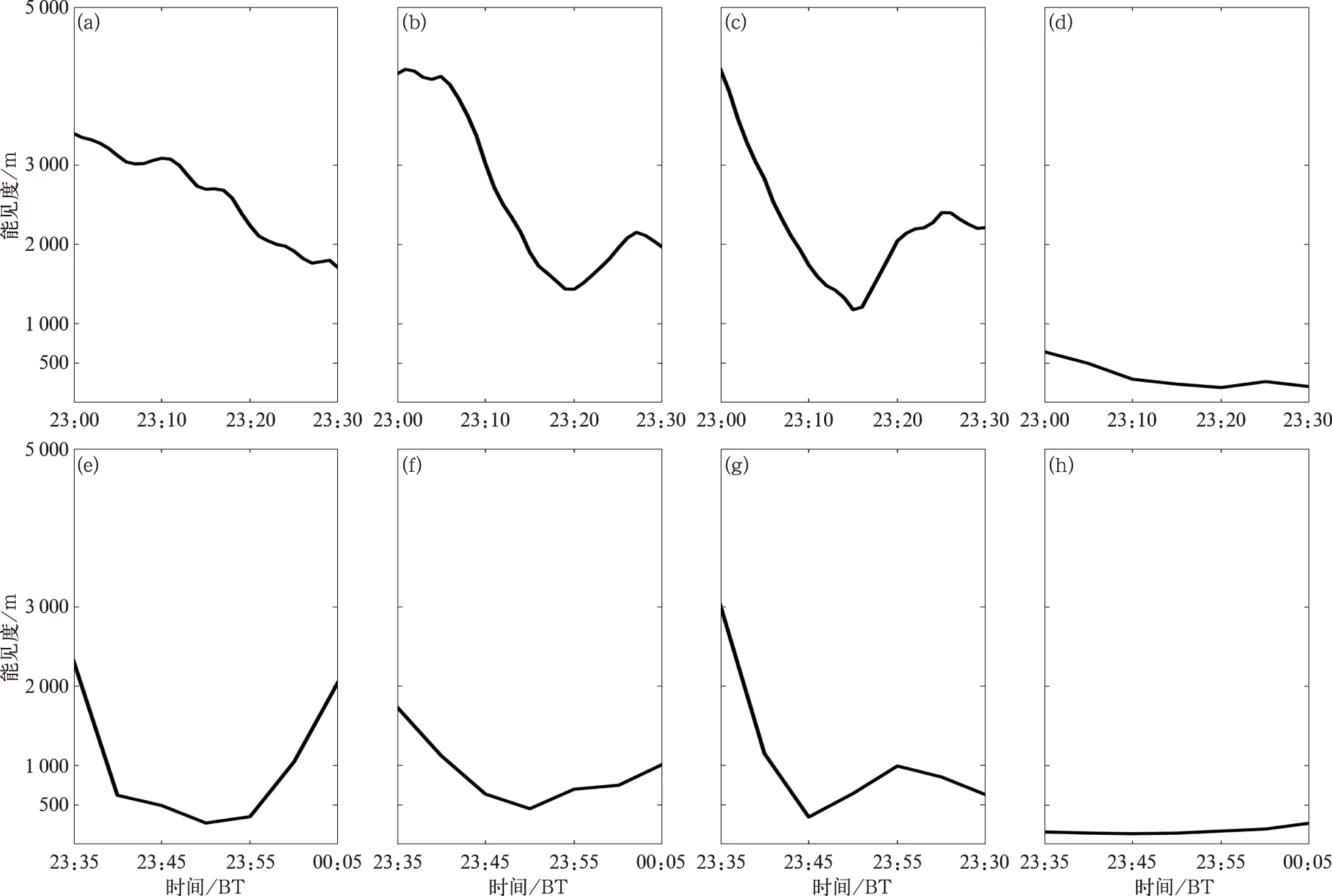
图6 2017年4月15日降水-雾过程经过能见度站时站点能见度变化(a)大猫岛站,(b)凉帽山岛站,(c)白鹅山礁站,(d)岙山万向站,(e)金鸡山站,(f)南海学校站,(g)老鼠山屿站,(h)岙山万向站Fig.6 Variations of visibility with the processing passes through the visibility stations on 15 April 2017(a) Damaodao Station, (b) Liangmaoshandao Station, (c) Baieshanjiao Station, (d) Aoshanwanxiang Station, (e) Jinjishan Station, (f) Nanhai School Station, (g) Laoshushany
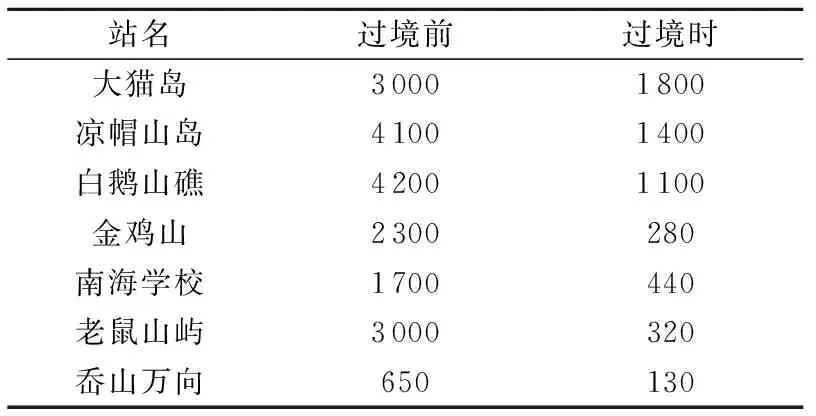
表2 过程过境前和过境时各站点能见度(单位:m)Table 2 Visibility at stations before and during the transit of the precipitation-fog process (unit: m)
3 低空雷达反射率强度和近地面能见度关系
对于雷达反射率(Z)和能见度(Vis)之间的关系,国外已经进行过一些研究。Gultepe et al(2006;2009)根据试验结果得出符合γ分布的能见度经验关系式为:
Vis=0.04e-0.098 836Z
式中:Z的单位是dB,Vis的单位是km。Li et al(2014)得出的经验关系式为
Vis=0.018Z-0.262
式中:Z的单位是mm6·m-3,Vis的单位是km。通过对比得出Vis=aZb指数关系模型的拟合效果优于基于γ分布的拟合效果(Li et al,2017),因而以下对雷达反射率强度和能见度之间的关系也采用Vis=aZb模型。
从2.2节的分析可知在过程离开前站点能见度随时间逐渐下降的过程,而毫米波雷达对各个站点的扫描实际上都是处于站点上空几百米的位置(根据各个站点离开毫米波雷达的位置不同,最低为岙山万向站的235 m,最高为金鸡山社区站的660 m),从高空影响地面需要一定的时间,因而在拟合时选取的能见度不仅是毫米波雷达扫描时刻的能见度,对之后一小段时间内的能见度也分别作了拟合,得到雷达反射率与扫描后3 min左右站点的能见度拟合效果最佳。根据2.1.3节的计算结果,雾区的平均垂直速度在2~3 m·s-1,3 min左右的时间差正好与液态水从毫米波雷达扫描高度到达地面的时间相一致。
对上述效果最佳的能见度和雷达反射率进行拟合,得到的关系式为
Vis=2.283Z-0.121
式中:Z的单位是dBz,Vis的单位是km。拟合曲线和观测数据如图7所示。从图2可以看到金鸡山社区站位于两个强回波区域之间,使得其能见度值和雷达反射率之间的关系与其他站点差异较大,因而在拟合时排除了该站点。从图7可以看到,在拟合曲线的上方和下方具有部分数据点偏离较远,对数据进行进一步分析发现偏高的数据点均来自于西部,偏低的数据点主要来源于岙山万向站。从表2可以看到,西部站点在过程过境前和过境时能见度值都要高于北部站点,导致拟合后西部站点部分数据点偏高。造成这一现象的可能原因有两个:一是这两个区域的能见度站分属两个地区,观测仪器的校准不一致,导致观测结果的差异;二是过程经过了中间这一段海区之后,性质发生了改变,从而能见度出现了明显差异。偏低的数据点,主要是因为岙山万向站的能见度在22:10左右就已经降至1 000 m以下,过程的影响使该站点从大雾加强为浓雾,与其他站点相比,其能见度始终明显偏低,因而出现数据点偏离拟合曲线下方较远的情况。
综上所述,拟合曲线总体上较好地模拟了低空雷达反射率强度和近地面能见度之间的关系。由于观测仪器的校准不一致或中间经过海区等原因,以及个别站点预先已经起雾等因素影响,导致部分数据点与拟合曲线偏离较远,未来还需要做一定的改进。
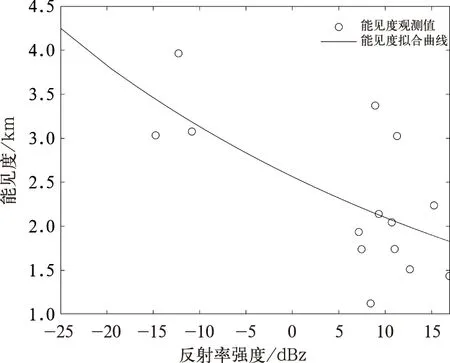
图7 能见度和雷达反射率强度关系Fig.7 Relationship between visibility and radar reflectivity
4 结 论
通过对毫米波雷达数据和能见度站数据的分析,得出的主要结论如下:
(1) 根据PPI模式扫描结果,降水-雾过程的空间尺度约为15 km,强雷达反射率中心分为几个区域,集中度不高,最强反射率在25 dBz左右,最弱反射率在-20 dBz左右。
(2) 结合RHI模式和THI模式扫描结果,完整地展示了降水-雾过程从连续降水到零星降水,之后降水停止在近地面形成雨雾系统,再到转变为雾的垂直结构变化过程。
(3) 通过径向速度的分析,显示过程的主体结构较稳定,边缘区域在对主体区域进行补偿,使过程维持发展。
(4) 毫米波雷达西部能见度站点在过程过境前和过境时能见度值都要高于北部站点。各站点能见度在过程接近时开始下降,在过程即将离开时达到最低(除大猫岛继续下降)。降水资料分析表明此过程主要带来的是雾而非降水。
(5) 用Vis=aZb的经验公式探索低空雷达反射率强度和近地面能见度关系,得到a=2.283,b=-0.121的拟合结果,总体上较好地模拟了低空雷达反射率强度和近地面能见度之间的关系。