基于电阻应变计的直升机吊挂测力传感器设计
2021-03-11雍利鹏李明波
雍利鹏, 李明波
(中航电测仪器股份有限公司,陕西 西安 700119)
直升机外吊挂运输作为一种快速、灵活的运输方式在军民领域已广泛应用,然而直升机吊挂运输属于高风险科目,在实际飞行中,超过10%的直升机飞行事故与吊挂飞行相关[1]。直升机吊挂起飞时,如果未知吊挂载荷而直接飞行可能会因过载造成安全事故;正常吊挂飞行时吊挂货物将产生额外的气动载荷与惯性载荷,会与直升机的运动相耦合,使直升机的飞行动力学特性发生变化[2],如果飞行员未知吊挂货物载荷变化,未能及时调整飞行姿态,将影响飞行稳定性[3],此时一旦发动机失效,直升机易进入飞行高度和飞行速度组合确定的危险区(回避区)[4],造成安全事故;到达目的地后,由于地面效应及其他环境影响,飞行员需要集中精力操控直升机,特别是单飞行员时,无暇顾及吊挂物的投放操作。此时可以通过监测吊挂物的载荷,在吊挂物触地、载荷小于门限值时,机电管理计算机控制货物挂钩装置打开,投放吊挂物[5]。因此,通过从直升机吊挂起飞、飞行、投放全过程监测吊挂物的载荷,可以为正常起吊飞行和飞行员调整飞行姿态提供参考,在到达目的地后,实现半自动化投放,降低人工参与度,保障吊挂飞行安全。当前国外直升机外吊挂运输应用十分广泛,有直接监测吊挂货物载荷的手段和方法,而国内主要采用间接的方法监测货物载荷。本文通过叙述电阻应变式测力传感器的工作原理,将直升机货物挂钩装置中的承载轴销设计为5 t量程的高可靠性四余度一体化测力传感器,实时准确监测吊挂货物载荷[6],综合误差不大于1%F.S.,并给出设计方法,为其他量程的测力传感器设计提供参考。
1 测力传感器工作原理
测力传感器为电阻应变式测力传感器,由产生弹性变形的弹性体、感知变形并转化为电阻变化的电阻应变计、将电阻变化转化为电压信号的惠斯通电桥等组成。当吊挂货物后,货物的重量通过吊挂投放机构作用于测力传感器,引起测力传感器的弹性体产生应变,进而使粘贴在弹性体上应变计的敏感栅变形,粘贴于测力传感器弹性体不同敏感部位的4支应变计组成的惠斯通电桥将应变计电阻变化转化为电压信号[7],如图1和式(1)所示,即当测力传感器感受到吊挂载荷时,惠斯通电桥输出一个与吊挂载荷呈线性关系的电压信号,实现对吊挂载荷的测量。
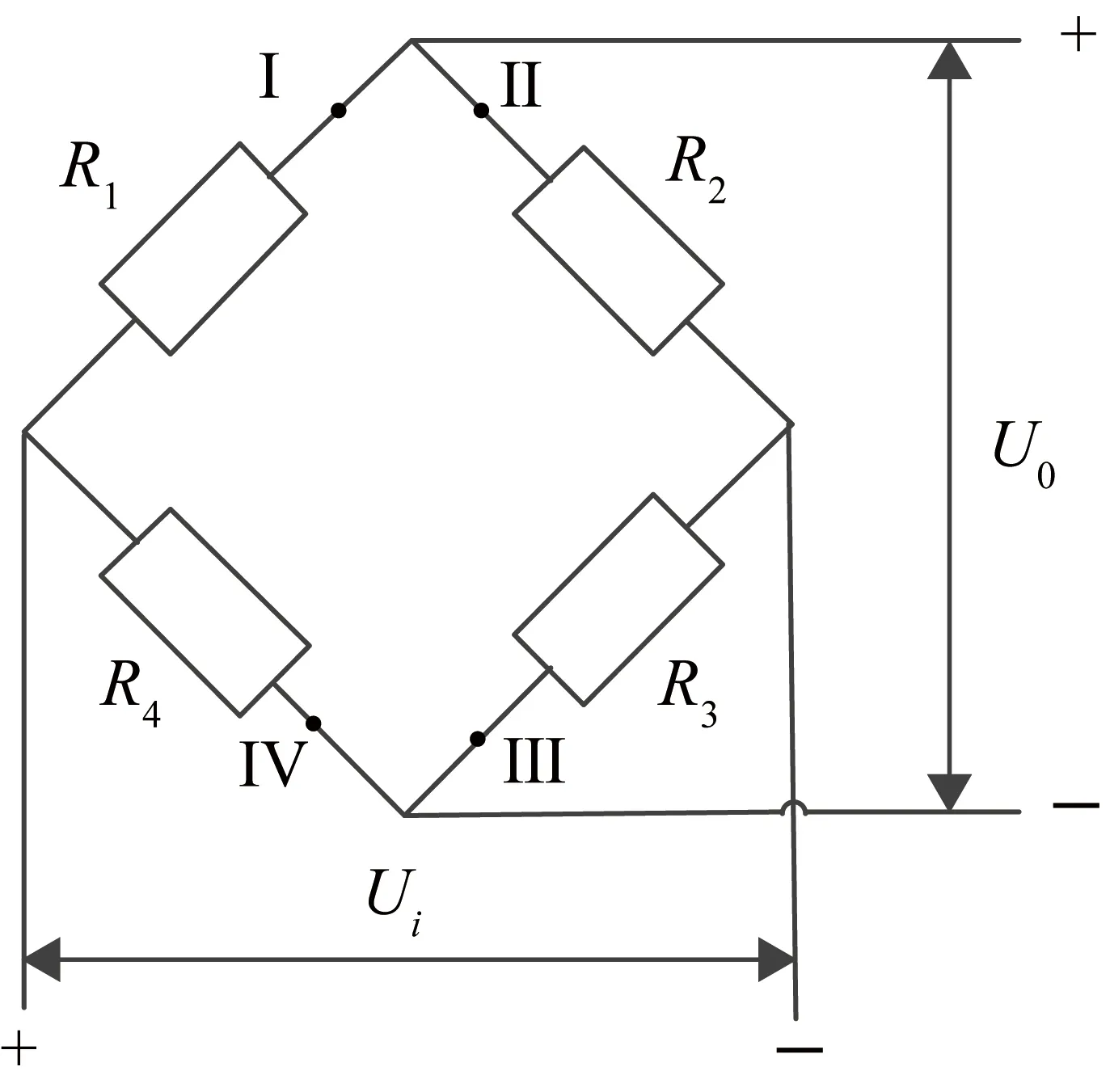
图1 惠斯通电桥
(1)
2 测力传感器设计
根据直升机外吊挂的具体结构和使用工况,将货物挂钩装置中吊挂投放机构与承载梁的连接轴销设计为测力传感器,轴销既作为货物挂钩装置中的承载部件,又作为测力传感器的弹性体,当货物挂钩装置上挂载货物时,货物的重量通过吊挂投放机构传递至测力传感器上,再经由测力传感器传递至承载梁,在此过程中测力传感器可以测出货物的载荷,节省空间和自身重量,载荷监测实时准确。以下将从弹性体设计、应变计选择、灵敏度计算、供桥电压设计、桥路设计和桥路补偿方法等方面对测力传感器进行设计。
2.1 弹性体设计
2.1.1 弹性体结构设计
根据测力传感器的工作原理,弹性体采用了经典的轴销剪切梁式结构,如图2所示。此种结构的测力传感器具有精度高、工艺成熟、可靠性高等优点,广泛用于测力传感器的设计中[8]。
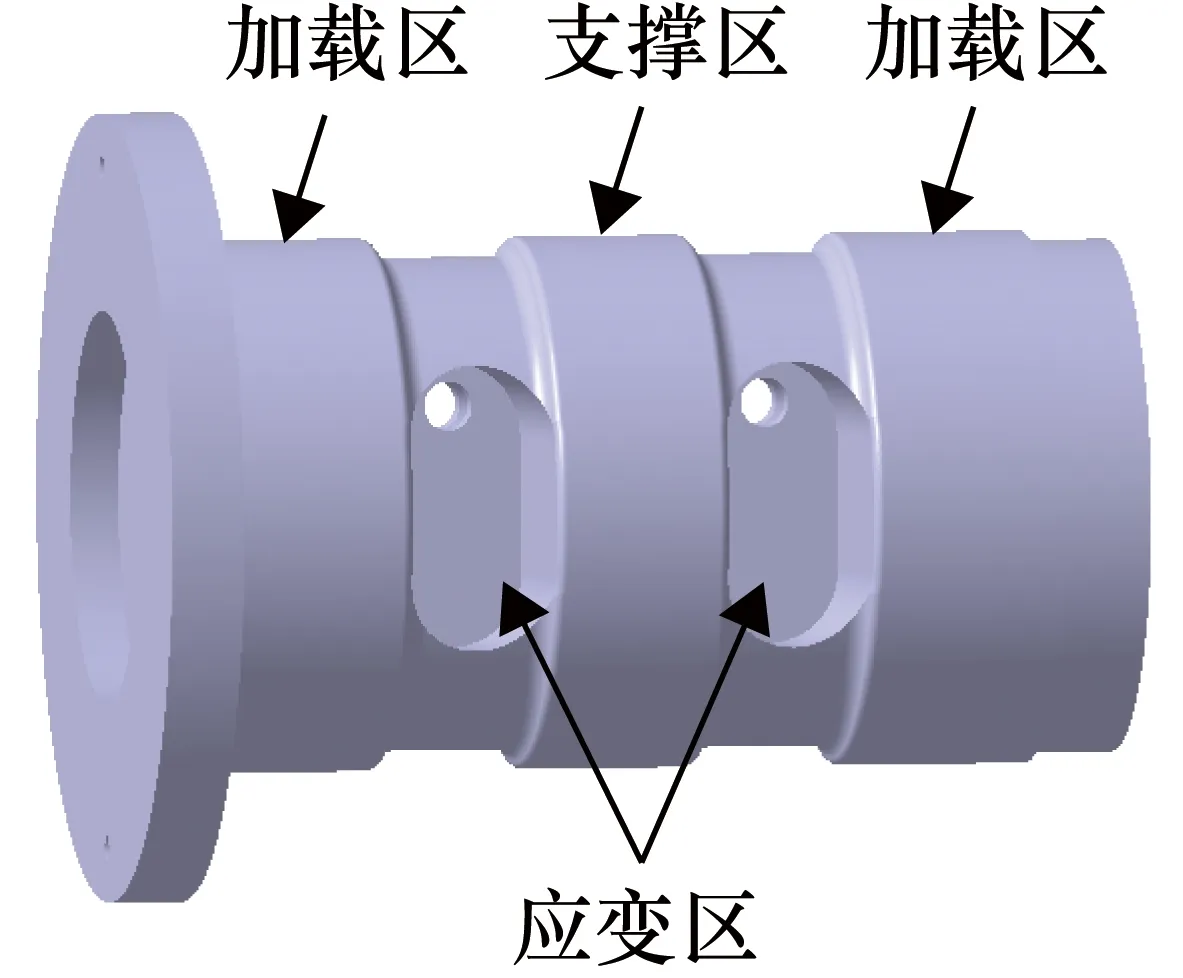
图2 弹性体结构
2.1.2 弹性体材料的选择
弹性体的材料选用优质不锈钢05Cr17Ni4Cu4Nb,该材料是由铜、铌/钶构成的沉淀、硬化、马氏体不锈钢,具有力学性能稳定、强度高、耐腐蚀能力强等特点,经固溶热处理后其抗拉强度σb≥1310 MPa,屈服强度σ0.2≥1176 MPa,机械综合性能好,适合作为弹性体的材料,同时满足货物挂钩装置的使用环境要求。
2.1.3 弹性体强度分析
弹性体的结构较复杂,使用ANSYS软件对弹性体进行强度分析计算[9]。按照实际工况环境,对弹性体中间下端与承载梁接触的下半圆施加固支约束,并对弹性体两边上端与吊挂投放机构接触的上半圆施加载荷,按4.9×104N(5 t)进行分析计算。弹性体网格划分、约束和载荷添加、应力分布情况如图3所示。
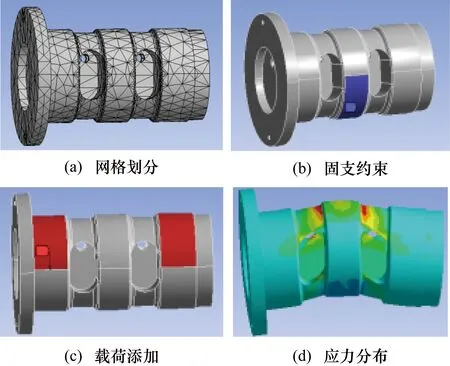
图3 弹性体分析图
通过静力学仿真分析,弹性体在4.9×104N载荷下的等效应力为σmax=577.17 MPa,而弹性体所选用的05Cr17Ni4Cu4Nb材料σ0.2≥1176 MPa,远远大于弹性体上的最大等效应力,安全系统n=σ0.2/σmax≈2.04>1.5,满足吊挂强度要求。
2.1.4 弹性体刚度分析
给弹性体施加使用载荷,得到弹性体的最大形变为0.025 mm,如图4所示。
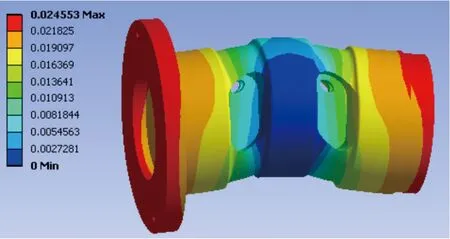
图4 弹性体形变分布图
由图4的分析结果可知,弹性体在使用载荷下的最大形变为0.025 mm,不会对货物挂钩装置的正常工作产生影响,故弹性体的刚度满足使用要求。
2.1.5 弹性体应变区分析
给弹性体施加4.9×104N载荷时,应变区应力分布均匀,大小为200~210 MPa,满足测力传感器设计要求,应力分布如图5所示。
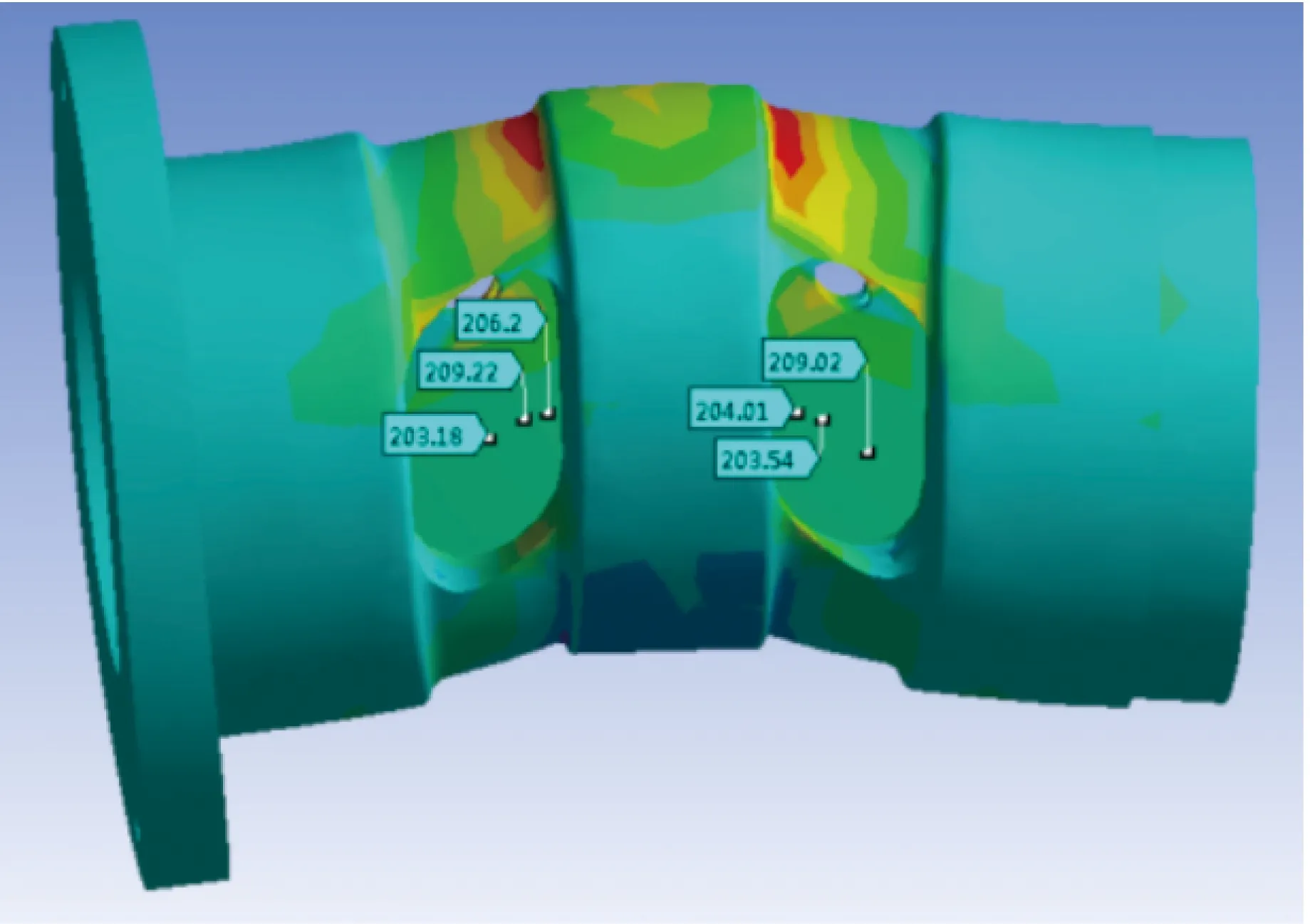
图5 应变区应力分布
2.2 应变计选择
根据弹性体的材料、受力形式和贴片区尺寸大小,应变计选择中航电测仪器股份有限公司生产的双栅应变计BE350-6HA-E(11),两栅互相垂直,可以测量剪切应力。该应变计为聚酰亚胺基底、康铜箔制成的全密封结构,具有温度自补偿、延伸率高、耐湿热性好、电绝缘性能好、使用温度范围宽[10]等特点,能够实现对弹性体受力应变的感知。
2.3 灵敏度计算
弹性体在受4.9×104N使用载荷时,应变区应力σ为200~210 MPa,应变计BE350-6HA-E(11)的灵敏度系数K为2,05Cr17Ni4Cu4Nb的弹性模量E为196 GPa,计算测力传感器的灵敏度S为
(2)
代入数值,测力传感器灵敏度S为2.04~2.14 mV/V,取测力传感器灵敏度S为2.1±0.1 mV/V。
2.4 供桥电压设计
供桥电压较低时,灵敏度输出较小,供桥电压过高时,虽然灵敏度输出增大,但会使应变计的工作性能变差,滞后和蠕变增大,并产生较大的零点漂移。为了得到理想效果,对供桥电压进行分析计算,影响供桥电压的因素有应变计的型式、敏感栅的面积和阻值,以及弹性体的散热能力、环境温度等。一般用经验公式进行供桥电压计算,计算公式为
(3)

2.5 桥路设计
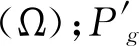
为提高测力传感器的可靠性,采用四余度设计[11],贴片位置如图6所示。根据弹性体的受力情况,图6所示应变计中R12,R14,R16,R18,R31,R33,R35,R37为压向,R22,R24,R26,R28,R41,R43,R45,R47为拉向。
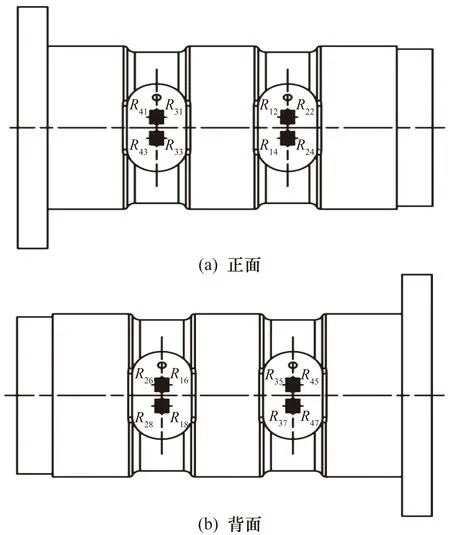
图6 贴片位置
由于加工误差,会造成货物挂钩装置中电动侧板和手动侧板作用在弹性体上的力可能不一致。为防止加工原因造成测量误差,四路桥路按图7所示进行组桥。
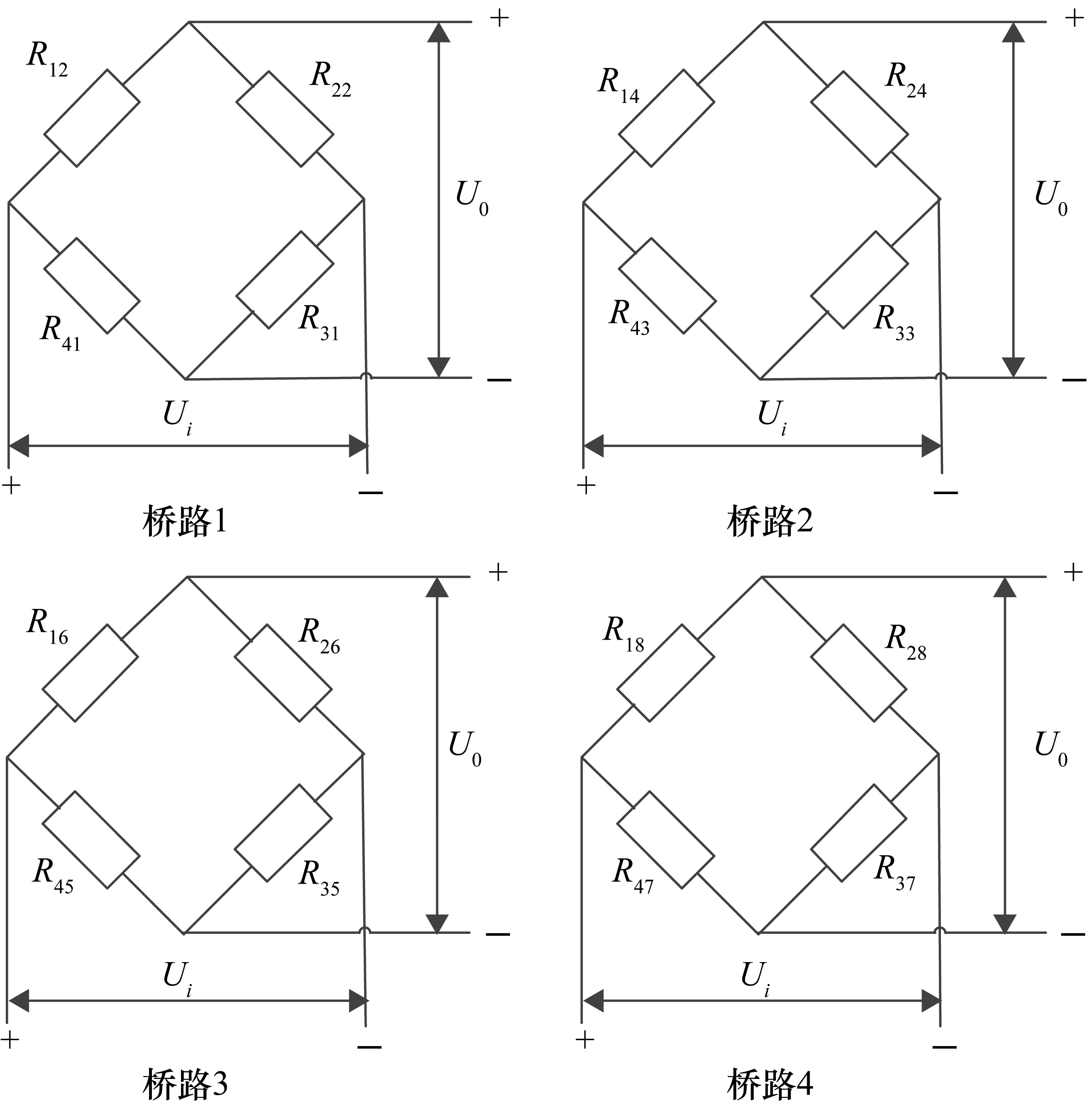
图7 四路组桥图
2.6 桥路补偿方法
2.6.1 零点输出补偿
根据测力传感器工作原理,由式(1)可知,在无载荷时,测力传感器的输出信号应为0,但由于各应变计之间电阻值的差异以及生产工艺造成测力传感器的输出不为0,需要对测力传感器的输出零位进行补偿。
测力传感器组桥完成后,若U0>0,即R2R4-R1R3>0,可在图1所示桥臂I中串入一定长度的锰铜线R0,使R2R4-(R1+R0)R3=0,对零点输出进行补偿。反之,若U0<0,即R2R4-R1R3<0,可在桥臂Ⅱ中串入一定长度的锰铜线R0,使(R2+R0)R4-R1R3=0,对零点输出进行补偿[13]。
在桥臂上Ⅰ或Ⅱ处串联的康铜线,采用双线无感绕法绕好,经老化处理后,再接入测力传感器电桥[13]。康铜线长度L的计算公式为
(3)
式中,Rin为测力传感器输入阻抗(Ω);r0为康铜丝单位长度的电阻值(Ω/mm);ΔU0为零点输出变化(V);Ui为供桥电压(V);L为补偿线长度(mm)。
测出各路测力传感器的输入阻抗和零点输出,按式(3)计算出康铜线长度L,对零点输出进行补偿,补偿后应在±0.5 mV范围内。
2.6.2 零点温度漂移补偿
经过零点输出补偿后,测力传感器在常温下为0,但使用环境为-55~+70 ℃,由于电阻应变计电阻温度系数的分散和弹性元件材料与应变计电阻材料热膨胀系数的不同,会引起不同温度下零点漂移[12]。此外,应变计性能差异、基底与胶粘剂厚度不均匀和固化程度不一致、焊点质量优劣不同、引出线的长短不同等因素都会引起零点温度漂移[13]。
零点温漂可以认为是由于4个桥臂的电阻温度系数不一致所引起的,于是可以在某一桥臂中串联一个温度系数较大的康铜电阻线,以提高该桥臂总的电阻温度系数[14]。在图1桥臂上Ⅲ或Ⅳ处串联一定长度的康铜线L,使其达到平衡。当零位在高温侧U0>0,则在桥臂Ⅲ处串入一康铜线L;若U0<0,则在桥臂Ⅳ处串入一康铜线L。当零位在低温侧时相反。康铜线长度计算公式为
(4)
式中:Rin为测力传感器输入阻抗(Ω);r0为康铜丝单位长度的电阻值(Ω/mm);α为康铜的电阻温度系数(4×10-4/℃);th为高温温度(℃);t为常温温度(℃);ΔU0为零点输出变化(V);Ui为供桥电压(V);L为补偿线长度(mm)。
测出各路测力传感器的输入阻抗和零点漂移,按式(4)计算出康铜线长度L,对零点高温温度漂移进行补偿,补偿后零点温度漂移应小于0.05%F.S./10 ℃。零点低温温度漂移补偿方法和要求与零点高温温度漂移补偿相同。
2.6.3 灵敏度温度补偿
环境温度升高(或降低)时,弹性元件材料的弹性模量会降低(或升高),灵敏度会增大(或减小),造成测力传感器灵敏度误差[15]。因此,在测力传感器灵敏度增大(或减小)的同时,使电桥电路的实际供桥电压也与之成比例减小(或增大),保持供桥电压与实际供桥电压的比值不变,则灵敏度也就保持不变[16]。在图8所示位置串入镍电阻Rmt/2,高温下Rmt按计算公式为
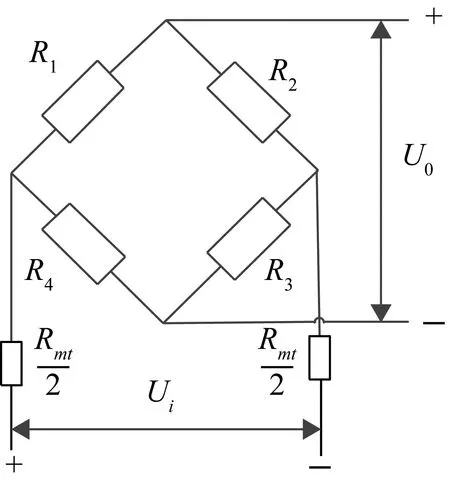
图8 串入镍电阻位置
(5)
式中,S为常温时的灵敏度(mV/V);Sh为高温时的灵敏度(mV/V);Rin为测力传感器输入阻抗(Ω);α为镍电阻温度系数(4×10-4/℃);th为高温温度(℃);t为常温温度(℃)。
测出各路测力传感器的常温、高温的灵敏度,输入阻抗,按式(5)计算出Rmt,对高温灵敏度进行补偿,补偿后灵敏度温度漂移应小于0.1%F.S./10 ℃。低温灵敏度补偿方法和要求与高温灵敏度补偿相同。
3 实验结果与误差分析
3.1 实验方法
常温测试时,将测力传感器通过工装安装在测力机上,连接好测试设备,系统初始化后,按1000,2000,3000,4000,5000 kg共5个加载点依次进行3次进程和回程加载,记录各加载点输出值。高温70 ℃和低温-40 ℃测试时在带高低温箱的测力机上进行,方法与常温测试相同。
3.2 实验数据
常温性能测试数据如表1所示。

表1 常温性能测试数据
采用端点法对常温测试数据进行计算,非线性为0.287%F.S.,重复性为0.08%F.S.,滞后为0.146%F.S.,综合误差为0.331%F.S.。
对高低温下的试验测试数据进行计算,高温下非线性为0.323%F.S.,重复性为0.119%F.S.,滞后为0.265%F.S.,温度对零点输出的影响为0.042%F.S./10 ℃,温度对输出灵敏度的影响为0.058%F.S./10 ℃,综合误差为0.467%F.S.。低温下非线性为0.51%F.S.,重复性为0.08%F.S.,滞后为0.107%F.S.,温度对零点输出的影响为0.029%F.S./10 ℃,温度对输出灵敏度的影响为0.093%F.S./10 ℃,综合误差为0.536%F.S.。
3.3 验证结果
通过常温、高温、低温试验测试,测力传感器的综合误差均小于1%F.S.,满足设计要求。
4 结束语
根据直升机外吊挂的具体结构和使用工况,将货物挂钩装置中的承载轴销设计为5 t量程的测力传感器,综合误差小于1%F.S.,实现外吊挂载荷的实时监测。其他量程的测力传感器可以依据电阻应变式测力传感器工作原理,参照本文所述弹性体设计、应变计选择、灵敏度计算、供桥电压设计、桥路设计、桥路补偿的方法进行适应性设计,满足不同直升机对吊挂载荷监测的需求,保障直升机吊挂飞行安全。
