无人地面车辆系统效能评价指标体系构建
2021-03-10朱小龙赵文轩张云
朱小龙 赵文轩 张云

摘 要:从“人机环”角度分析无人地面车辆系统效能的影响因素,并基于无人地面车辆系统效能评估指标的构建原则,构建一套用于无人地面车辆系统效能评估的评价指标体系,以期为后续无人地面车辆系统效能评估提供参考。
关键词:无人地面车辆;系统效能;指标体系
中图分类号:TP273 文献标识码:A 文章编号:1003-5168(2021)19-0047-03
Abstract: From the perspective of "man-machine-environment", the influencing factors of unmanned ground vehicle system efficiency were analyzed, and an evaluation index system for unmanned ground vehicle system efficiency evaluation was constructed based on the principle of unmanned ground vehicle system efficiency evaluation index construction, which provided reference for subsequent unmanned ground vehicle system efficiency evaluation.
Keywords: unmanned ground vehicles;system efficiency;index system
無人地面车辆系统效能评估的内容主要包括评估指标体系的构建、系统建模以及评估模型的选择3个方面[1-4]。系统效能评估指标作为无人地面车辆系统效能评估的重要基础,虽然目前已受到相关学者的关注,并取得了一定的研究成果[5-8],但尚未形成统一的评价指标体系。以无人地面车辆系统效能为研究对象,综合分析无人地面车辆系统效能的影响因素,并基于系统效能评价指标构建原则,建立一套用于无人地面车辆系统效能评价的指标体系。
1 无人地面车辆系统效能的主要影响因素
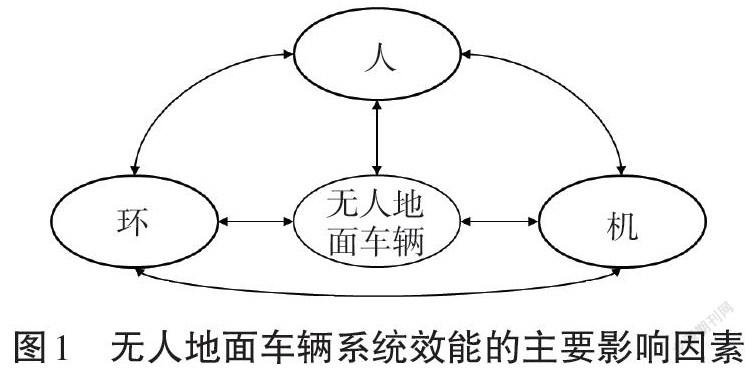
未来,无人车辆将在海陆空等领域全面发展。在实际运用中,无人地面车辆必然要与其他各类装备和力量联合使用。因此,无人地面车辆将构成一个有机系统,在这个系统内,主要组成要素为人、机、环,如图1所示。
“人”,即无人地面车辆的使用控制人员。操作员的指挥能力、操作控制装备能力以及装备运用编组方式,都将对装备系统的效能产生重要影响。
“机”,即无人地面车辆及其编队本身。这一要素中影响系统效能的因素主要包括车辆战术技术性能、实际作战能力、指挥控制能力和协同作战能力。战术技术性能主要体现在其动力性、越野性以及控制能力等方面;实际作战能力主要体现在可完成什么类型的具体任务、处于可靠工作的概率、成功完成任务的概率等方面;指挥控制能力主要体现在复杂的磁干扰环境下无人地面车辆与基站之间通信和数据传输的可靠性、抗干扰性和实时性等方面;协同作战能力主要体现在无人地面车辆之间的数据传输、车队自主编队与控制、作战任务的规划与分配、集群控制能力等方面。
“环”,即车辆所处的外部环境。它主要包括无人地面车辆所处场地的气象环境(如风、雨、雪、雾等)、地形地貌环境(如平原、高原、山坡以及铺装路面或非铺装路面等)以及电磁环境。
2 无人地面车辆系统效能指标构建的原则
无人地面车辆系统效能的评价指标是能够代表无人地面车辆相关能力的定量指标或定性指标。该指标的选取直接影响最终投入实际应用的无人地面车辆系统效能,因此构建评价指标时应当遵循以下原则。
2.1 客观性原则
系统效能评价指标的选择和确定应以能充分体现其作战能力和效果的基础数据为基本依据,坚持科学性和准确性,实事求是,不主观臆造。
2.2 典型性原则
选取已经过试验检验并得到人们理解和认可、能充分反映各类无人地面车辆系统效能水平的指标作为核心的典型性指标。
2.3 可测性原则
要求评价指标具有可测性,且尽量做到定量化。可以在系统分析的基础上,综合采用各种数学理论方法,使评估指标能测量、可计算,经过统计处理得出定量结果。
2.4 可比性原则
评价指标应能使不同车型在不同作战环境下、不同作战任务之间进行比较。系统效能评价指标应以国际标准和有关技术规范为依据,实现规范化、标准化以及系统化。
2.5 导向性原则
评价指标应根据无人地面车辆未来发展的科学判断和总体规划,结合国内外先进经验和技术,对无人地面车辆关键技术的研发和装备作战编组运用工作有导向作用。
3 无人地面车辆系统效能指标构建
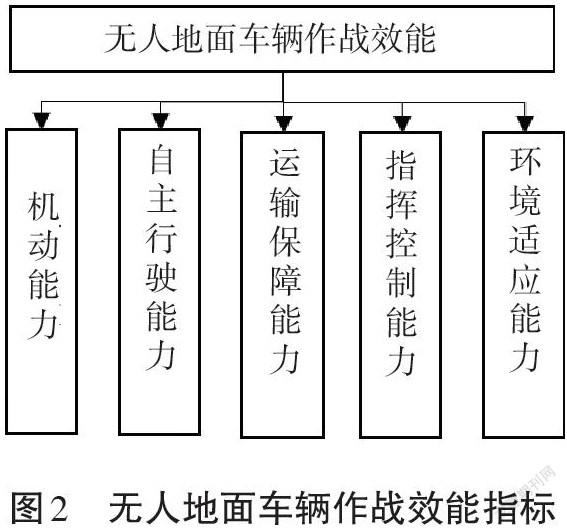
无人地面车辆所运用的关键技术和技术性能是影响其系统效能的最重要因素。考虑未来无人地面车辆实际使用需求和运用特点,遵循评价指标体系建立原则,从战术技术性能角度出发,将无人地面车辆系统效能总指标分为机动能力、自主行驶能力、指挥控制能力、运输保障能力和环境适应能力5个方面,如图2所示。
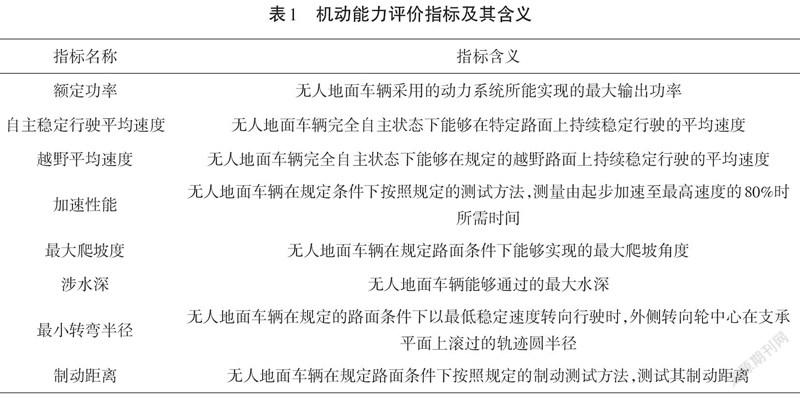
3.1 机动能力
无人地面车辆的机动能力是指无人地面车辆在路面行驶的基本能力。具体评价指标主要包含额定功率、自主稳定行驶平均速度、越野平均速度、加速性能、最大爬坡度、涉水深、最小转弯半径以及制动距离等,具体含义见表1。
3.2 自主行驶能力
无人地面车辆的自主行驶能力是指无人地面车辆在系统给定的既定任务下,自动完成从初始点运行到目的地且自主规避行驶过程中的障碍物的能力。具体评价指标主要包含环境感知能力、定位导航精度、规划决策能力、运动控制精度以及深度学习能力,如表2所示。
3.3 指挥控制能力
无人地面车辆的指挥控制能力主要指无人地面车辆与基站和无人地面车辆与无人地面车辆等之间的信息传输能力。具体评价指标主要包含接通概率、平均通信时长、信道误码率以及共享信息能力,如表3所示。
3.4 運输保障能力
无人地面车辆运输保障能力是指无人地面车辆高效完成运输保障任务的能力。具体评价指标主要包含最大续驶里程、保障任务复杂性、保障准备时间、保障任务成功率、轻量化设计水平以及模块化设计水平,如表4所示。
3.5 环境适应能力
无人地面车辆搭载的各项仪器、动力、机械等设备在一定环境中容易失效,导致无人地面车辆无法完成既定工作。因此,无人地面车辆的环境适应能力一般考察其温度范围、海拔、气象适应、噪声值和振动强度,如表5所示。
4 结语
无人地面车辆作为无人系统的重要组成部分,其系统效能评价贯穿无人地面车辆的开发、验证以及应用的各个阶段。通过综合分析无人地面车辆系统效能的主要影响因素,在系统效能评价指标构建原则的基础上,构建了一套包含机动能力、自主行驶能力、运输保障能力、指挥控制能力以及环境适应能力的系统效能评价指标体系,可为后续开展无人地面车辆研究提供参考。
参考文献:
[1]尹纯,黄炎焱,王建宇,等.武器装备作战效能评估指标体系指导模式[J].南京理工大学学报,2009(6):779-784.
[2]李静,唐振民,谭业发,等.无人地面车辆自主性评价指标体系研究[J].微型机及应用,2016(2):66-69.
[3]王彤,周庆军,涂建平.两栖装甲车系统效能评估[J].舰船电子对抗,2019(3):21-25.
[4]孙杨,陈慧岩.无人地面车辆测评体系研究[J].兵工学报,2015(6):978-986.
[5]朱华勇,牛轶峰,沈林成,等.无人机系统自主控制技术研究现状与发展趋势[J].国防科技大学学报,2010(3):115-120.
[6]牛轶峰,沈林成,戴斌,等.无人作战系统发展[J].国防科技,2009(5):1-11.
[7]王雅琳,杨依然,王彤,等.2019年无人系统领域发展综述[J].无人系统技术,2019(6):53-57.
[8]张涛,李清,张长水,等.智能无人自主系统的发展趋势[J].无人系统技术,2018(1):11-21.
3808500338274
