大型光学望远镜子镜单元微位移促动器综述
2021-03-09刘炎森张景旭安其昌
刘炎森,张景旭,杨 飞,安其昌
(1.中国科学院长春光学精密机械与物理研究所,吉林 长春 130033;2.中国科学院大学,北京 100049)
1 引 言
大型光学望远镜有单块主镜和拼接主镜两种形式,单块主镜受加工精度、制造成本、镜面变形以及运输安装等因素影响,口径在达到一定程度后便无法再继续增大。目前最大单块主镜望远镜口径达到8 m级。拼接镜面主镜是由小块的子镜按顺序排列而成,通过子镜主动支撑技术完成各自位置的调整。因其制造和应用等方面的可行性,使其能够支持望远镜向更大口径发展。目前涉及到该技术的大型望远镜包括已经建成的10m级望远镜W.M.Keck telescope(Keck),KeckⅡ,Hobby-Eberly Telescope(HET),Southern African Large Telescope(SALT),Gran Telescopio Canarias(GTC)[1-8]和我国的4 m级望远镜Large sky Area Multi-Object Spectroscopic Telescope(LAMOST)[9],正在建设当中的包括25 m级望远镜Giant Magellan Telescope(GMT)、30 m级望远镜Thirty Meter Telescope(TMT)和European Extremely Large Telescope(E-ELT),以及6 m级太空望远镜James Webb Space Telescope(JWST)[10-13]。
微位移促动器是拼接镜面望远镜子镜支撑系统的关键部件,起到支撑和调节子镜位姿的作用。促动器通过高精度的伸长或缩短,控制每块子镜按照设计要求排列在指定位置,从而实现各子镜的共焦和共相。拼接镜面光学红外望远镜的促动器均需达到纳米级分辨率和毫米级的行程。随着望远镜口径的不断增大,其所受重力和风载等影响导致的结构的变形量更大,所需促动器的行程因此变得更高。而大行程和高精度在实际应用中很难同时实现,已建10米级望远镜中应用的促动器无法直接应用于未来30米级或更大口径的望远镜中[14]。国外已经尝试采用粗精结合的方式,即将促动器的功能分成卸载系统和精调两部分,来提高促动器的行程。并且针对促动器的抗扰性能,分别提出采用柔性促动器和对刚性促动器增加主动阻尼两种方案[15-16]。但随着新问题的出现,各种促动器结构还需要进一步优化。国内也曾对应用于拼接镜面望远镜的微位移促动器及其控制系统进行设计和测试[17-19],均获得不错的测试结果,但相比更大口径望远镜促动器的使用要求,还需要开展更深入的研究。本文旨在通过分析各种促动器的结构形式,结合促动器的发展要求,总结位移促动器的发展趋势,为未来大口径望远镜促动器的设计提供参考。
本文首先阐述微位移促动器的功能和原理,然后介绍各种微位移促动器的结构,接下来将其分类和汇总,并对比各种结构形式的优劣,最后针对大型光学红外望远镜的发展需要,对促动器的发展趋势做出总结。
2 微位移促动器发展现状
2.1 微位移促动器的性能要求
微位移促动器的主要作用是调节子镜位姿。子镜沿镜面法向的旋转以及在镜面所在平面内的移动由被动支撑结构约束,移动量很小且不会对望远镜成像质量产生明显影响。而子镜沿镜面法向的移动(离焦)和相对镜面的偏转则会严重破坏望远镜成像质量。为了控制子镜的离焦和偏转,通常在每块子镜背面布置三个促动器,通过子镜边缘的位置传感器检测子镜间位置误差,并将误差信号反馈给促动器,对误差进行补偿,从而保持各子镜间相对位置的精确。
根据望远镜的成像要求,可推算出各子镜间相对位置的最大误差要求,也即微位移促动器的运动精度要求。望远镜在不同的俯仰角工作或在跟踪观测目标时会由于重力而使结构产生变形,促动器需要具有一定的行程以补偿望远镜产生的变形。同时促动器的负载能力应该大于镜面对促动器的压力。此外促动器还应具有快速的反应能力以及一定的寿命和可靠性[20]。
由于各望远镜的观测对象和成像要求不同,导致对促动器的分辨率要求不同。例如HET,SALT和LAMOST的使用要求均为光谱观测[21-23],只需要满足光线的共焦要求,促动器达到几十纳米的分辨率即可。而其他需要对观测目标成清晰影像的光学望远镜,则要求同时满足光线的共焦和共相,促动器应具有几纳米的分辨率。同时受望远镜结构和观测环境等影响,使促动器的使用条件不同。如各拼接镜面望远镜的子镜大小不同,所需促动器的负载能力就不同。故不同的望远镜都对其使用的微位移促动器提出各自的性能要求。
2.2 已建成望远镜中应用的促动器
2.2.1 Keck和KeckⅡ促动器
Keck促动器主要由伺服电机、滚柱丝杠和液压装置组成,如图1所示。旋转编码器监测伺服电机的旋转角度,其分辨率决定了促动器的最小步长。滚柱丝杠和输出轴采用了两种不同的导向装置,滚柱丝杠的运动范围较大,通过滑动导轨支撑,而输出轴的行程很小,用挠性膜片支撑,既简单又实用。经测试,促动器的平均分辨率大约为4.15 nm左右,平均定位精度为7 nm[24]。KeckⅡ望远镜的设计与Keck望远镜相同,仅在软件和电脑硬件系统等方面做出改进[8]。

图1 Keck促动器内部结构[24]
2.2.2 HET和SALT促动器
HET在观测时主镜保持55°仰角恒定,只做方位运动,使望远镜子镜支撑系统受力方向和大小保持恒定。子镜位姿由电机驱动的商用线性促动器搭载挠性杠杆控制。由桁架提供支点,利用杠杆将子镜和促动器相连,如图2所示。杠杆提供11.9∶1的缩放,以提高商用促动器的精度和负载能力。商用促动器由TS Products(Post Falls,Idaho)提供,为2200型直线驱动设备。该促动器具有25 mm的行程和218 nm的分辨率。整个系统最终可获得1.83 mm的行程和18 nm的分辨率[25]。
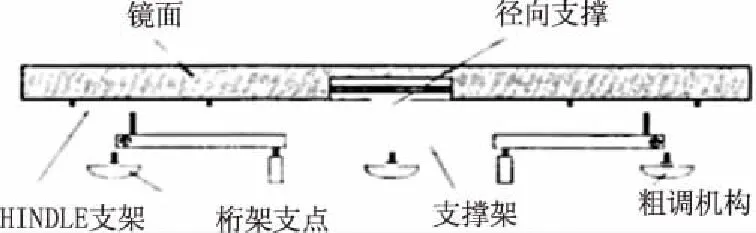
图2 HET子镜支撑结构[25]
SALT为与HET对应放置在南半球的望远镜,其设计以HET为基础,并根据观测需求、科技进步和HET的应用经验等方面做出改进[21]。SALT促动器同样以商用促动器为基础,搭配缩放比为12∶1的杠杆提高运动精度。其促动器由Physic Instrumente公司提供,具有20 mm行程和360 nm的分辨率[26]。
2.2.3 GTC促动器
GTC促动器原理与Keck促动器相似,同样由电机、滚柱丝杠和液压装置组成。通过带有编码器的电机驱动滚柱丝杠,将旋转运动转变为轴向运动,再以液压装置对轴向位移进行缩放,保证输出端的运动精度和负载能力。该促动器精度为1.19 nm,行程可达到1.6 mm左右[27]。
2.2.4 LAMOST促动器
LAMOST反射改正板MA选择使用商用促动器搭配柔性杠杆。促动器选用美国Diamond Motion(原TS Products)公司的TS 2200型直线设备,行程25 mm,分辨率50 nm。杠杆缩放比为10∶1,并设计成柔性结构,如图3所示。杠杆通过一副垂直布置的高强度不锈钢片作为支点,即杠杆扭转部分,能够实现无空回和无摩擦。杠杆横梁末端布置两副平行的钢片,分别对促动器进行侧向解耦和轴向解耦,以保护促动器免受过度侧向力[28]。

图3 LAMOST柔性杠杆[28]
2.3 未来30 m级望远镜促动器设计方案
2.3.1 TMT促动器初期结构
TMT促动器设计成一种柔性结构,由重力卸载机构和音圈电机组成。重力卸载机构旨在平衡镜面重力,即提供支持力,并为促动器提供行程。音圈电机对输出轴施加额外推力,进行精密调节。如图4所示。电机转动线轴,绕过定滑轮为弹簧施加拉力,然后通过杠杆推动输出轴。杠杆支点采用商用的C-Flex挠性轴承,可提供足够的轴向和径向刚度,并减小摩擦和空回。音圈电机为中空结构。输出轴缠有线圈,从电机磁体中穿过。该结构步长不能确定,需要在输出轴安装位置传感器检测促动器的运动量[14]。
2.3.2 E-ELT促动器初期结构
E-ELT初期设计的促动器同样采用柔性结构。如图5所示。重力卸载机构提供 μm级的移动精度,音圈电机提供nm级的精度,两段结合以实现大行程和高精度。促动器以无刷电机驱动,由行星齿轮减速,通过精密丝杠结构推动平板弹簧外侧,两片平板弹簧成对使用,输出轴连接在板簧内侧。音圈电机磁体和线圈分别安装在输出轴和卸载机构上,协助弹簧为输出轴施加推力。试验证明其镜面定位误差的平均值小于3 nm[29]。
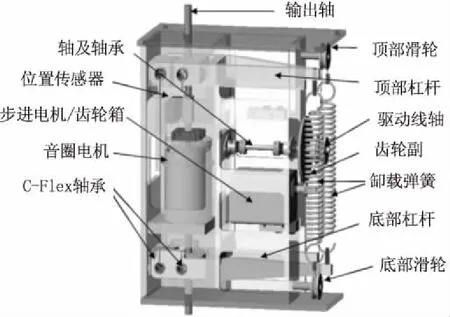
图4 TMT初期促动器[14]
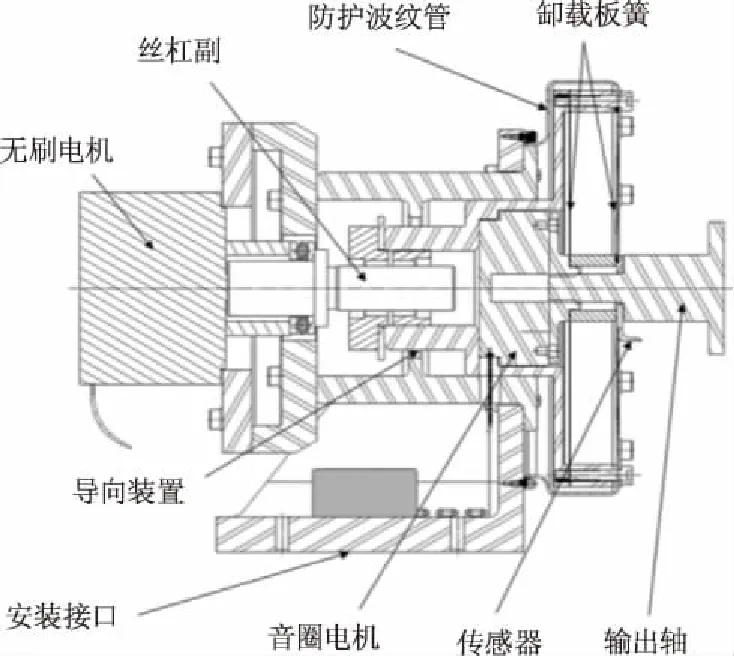
图5 E-ELT促动器内部结构[29]
2.4 其他促动器结构
其他一些被讨论、设计以及试验过的微位移促动器对该技术的发展同样具有参考价值。包括部分拼接镜面望远镜促动器的前期设计,如Keck望远镜早期未采用液压装置的精密滚柱丝杠促动器设计[20,30]、LAMOST带有平衡重作为重力卸载结构的促动器设计[31-32]、CELT带有主动卸载和被动卸载装置结合的柔性促动器设计[33]。CELT(即TMT前身)曾对促动器技术做了系统的调查,总结了促动器的性能要求,提出和对比各种促动器可行方案,并介绍了促动器相关技术[34]。大型地基拼接望远镜GMT,采用稀疏口径布局设计,并非传统意义上的拼接镜,其单块子镜直径已达8.4 m,使其子镜质量和所受风载以及重力的影响均和上述拼接镜面望远镜有很大差别。不同于其他拼接镜面主动支撑系统,其主动支撑结构采用硬点定位技术[35]。空间光学望远镜JWST,因其工作环境不受重力影响,因此其子镜支撑系统以及对促动器的性能要求均不同于地面望远镜,其促动器形式同样有所不同[36-37]。
2.5 微位移促动器最新进展
TMT曾对刚性促动器和柔性促动器进行了对比测试,柔性促动器在抑制震动方面表现更好,进而开展了深入的研究。促动器结构经过不断优化,改用精密丝杠和杠杆作为卸载机构,音圈电机也通过杠杆和输出轴相连,以减小音圈电机的负载,如图6所示。该促动器可实现大于5 mm的行程和小于5 nm的分辨率[10,15]。E-ELT在主镜装配测试中采用三个基于压电陶瓷的刚性促动器。并尝试在刚性促动器上应用正位置反馈对系统震动做主动抑制,经过测试证明,该方法能够在极低的成本下实现优异的性能[16]。E-ELT也曾对柔性促动器中粗精结合的动作方式进行了动力学分析,并设计相应的控制系统,最终使促动器的定位误差保持在1.4 nm[38]。目前E-ELT已经对子镜总体支撑系统做出了进一步的改进和测试[39-40]。
图6 TMT促动器[10]
印度为了提高在大型光学红外望远镜方面的技术水平,开展了1.5 m口径拼接望远镜Prototype Segmented Mirror Telescope(PSMT)的测试。PSMT采用了柔性促动器结构,如图7所示。该望远镜的口径较小,其子镜直径仅有60 cm,对促动器的行程要求仅为±1.5 mm。其设计的碟形导向机构可有效防止输出轴径向偏移,且成本低,占用空间小。通过对控制系统的优化,PSMT促动器在测试中的稳态误差和追踪误差仅为5.73 nm和10.15 nm[41-43]。

图7 PSMT促动器模型及剖视图[42]
国内在大型拼接镜面望远镜促动器技术上也做了相关探索。例如结合LAMOST项目,设计了一种精密丝杠形式促动器,其分辨率到达(201±48)nm[17]。针对大型拼接镜面望远镜,研制了基于巨磁致伸缩材料的促动器,如图8所示。

图8 子镜主动支撑系统及促动器简图[18]
经测试分析,其有能力在600N的负载下实现2 mm的行程并达到6 nm的分辨率[18,44]。在促动器的控制方面,设计了一种基于音圈电机促动器的自抗扰控制器,可有效改善系统的追踪误差和抗扰性能[19]。对于子镜位姿的偏转,针对压电陶瓷促动器开展了子镜控制系统的研究[45]。国内在其他用途望远镜促动器技术上的研究也可作为此领域的参考。例如针对110 m口径的新疆奇台射电望远镜设计的高精度位移促动器[46-47],基于南极低温环境下射电望远镜研究的微位移促动器[48],以及应用于环形太阳望远镜的微位移促动器和应用于空间光学望远镜的音圈力促动器[49-50]。
2.6 微位移促动器参数对比
综合考虑已建和在建大型地基光学红外拼接镜面望远镜的基本情况,对其采用的促动器的两个主要参数,即精度和行程进行对比,如表1所示。表中促动器参数为设计值。

表1 促动器主要参数对比
3 微位移促动器分析
3.1 位移促动器结构分类
为便于理解促动器的工作原理和动作方式,按照力或力矩的传递过程,将微位移促动器分解成不同机构,并对相似结构进行归类,总结出4种类型,分别为采用液压缩放装置的液压促动器、电机驱动的商用线性促动器搭载杠杆、基于粗精结合方式的音圈电机促动器和应用磁致伸缩原理的巨磁致伸缩促动器。如表2所示。

表2 微位移促动器分类
液压促动器由电机、精密丝杠和液压缸三部分组成,如图9所示。由驱动电机产生扭矩,通过精密丝杠将扭矩转换为轴向推力,经过液压缸将推力放大后传递到输出轴。液压装置运动平顺,且能够提供较大的缩放比,可以使丝杠在较小负载下工作。但在促动器需要较大行程时,丝杠必须提供足够的位移量,这将造成系统累积误差增大。如Keck促动器的液压装置缩放比为24∶1,若将其行程由1.1 mm增大至5 mm,需要精密丝杠的位移量达到120 mm左右。
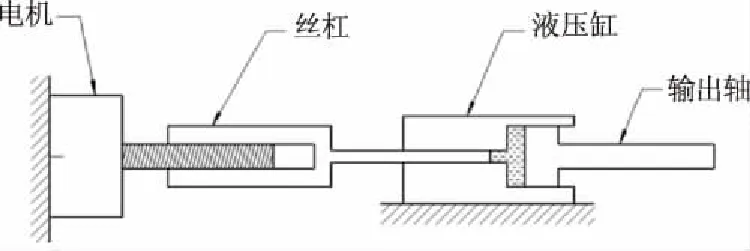
图9 液压促动器
商用促动器不是针对拼接镜面子镜主动支撑系统设计的,在精度和负载方面,商用促动器都不能达到拼接镜的使用需求。利用杠杆放大精度和负载,在一定程度上解决了问题,如图10所示。但经过杠杆缩放,导致总体的行程较小,很难满足未来望远镜的大行程要求,因此限制了商用促动器的应用。

图10 商用促动器
音圈电机促动器可分为卸载装置和音圈电机两部分。通过卸载装置对镜面提供支撑和位移,使音圈电机在小负载下工作。音圈电机的力可视为施加到了卸载弹簧上,通过协助弹簧伸长或压缩,使输出轴精密的移动。如图11和图12所示。因而促动器的精度取决于音圈电机的出力精度和弹簧的弹性系数。其中TMT促动器和E-ELT促动器相比,在驱动器和输出轴之间安装了杠杆机构,使驱动器的负载更小,能够减少功耗和成本。但杠杆结构占用空间,且使输出位移非线性,对促动器的行程会有一定影响。
巨磁致伸缩促动器是我国的一个研究项目,是针对拼接镜面子镜单元设计的[13]。如图13所示。它的动作可分为两个阶段。先利用两个相对较长位移的磁致伸缩促动器串联,经过杠杆将位移放大,使促动器具有一个满意的行程,再由高分辨率的磁致伸缩促动器进行精密的调节。

图11 E-ELT,PSMT促动器

图12 TMT促动器

图13 巨磁致伸缩促动器
3.2 位移促动器结构对比
微位移促动器通过驱动结构产生力或转矩,经过传动机构传递到输出轴,传动机构同时也承担着放大力和缩小位移的作用,使促动器精度更高,负载更大。各机构在促动器实际应用中的主要性能表现如表3和表4所示。对于采用音圈电机的柔性促动器,音圈电机属于附加的用于精密调节的驱动结构。压电陶瓷材料和巨磁致伸缩材料既可以作为精密调节的驱动结构,也可以通过杠杆将其行程放大,作为主要驱动机构。各种结构的性能表现均有优劣,无法找到一个完美的机构使其完全适用于微位移促动器的各项要求。在做促动器的设计时,应将优势互补的机构搭配使用。如将液压装置和滑动丝杠结合,既解决了机构自锁问题,也可使机构运行更加平顺。将压电陶瓷和杠杆结合,以解决其行程不足的问题。同时也可以考虑机构的优化,如对液压机构优化,改善其漏液问题,以减少后期维护。

表3 驱动机构对比

表4 传动机构对比
3.3 微位移促动器辅助机构
除驱动机构和传动机构以外,在设计微位移促动器时还应考虑移动部件的导向问题、转动部件的轴向固定问题、系统的密封问题和预紧问题等。如输出轴或滑动丝杠的螺母在轴向移动时,会因负载而产生径向偏移,降低促动器精度;滑动丝杠在转动时,如果不增加止推装置则会使电机因承受轴向力而缩短寿命;同时,为防止滑动丝杠产生空回和液压装置产生负压,需要对机构进行一定的预紧。
3.4 刚性促动器和柔性促动器对比
通常把应用音圈电机的、在不通电的情况下刚性很小的促动器称为柔性促动器,如TMT促动器和E-EL促动器。相对于柔性促动器,将传统的液压促动器、丝杠形式的商用促动器和巨磁致伸缩促动器等称为刚性促动器。应用自适应光学系统和子镜支撑系统的闭环控制可有效抑制由重力、温度变化和风载引起的扰动,而无法减缓由机械震动带来的高频率扰动[51]。TMT促动器在改进过程中,曾对刚性促动器和柔性促动器做出测试对比,应用音圈电机的柔性促动器能够更好的抑制内部震动,应用压电陶瓷的刚性促动器则在抑制风载干扰方面表现更好。但考虑柔性促动器最差的表现优于刚性促动器最差的表现,进而选择柔性进行后续研究。而应用压电陶瓷的刚性促动器由于采用了力反馈机制,同样可满足其可靠性评估要求,将作为备选设计[15]。E-ELT在刚性促动器上采用正位置反馈对系统震动做主动抑制,在极低的成本下实现优异的性能[16],证明刚性促动器同样具有一定的发展空间。
参考以往的促动器试验经验,对刚性促动器和柔性促动器的优缺点做出对比,如表5所示。

表5 刚性促动器和柔性促动器对比
刚性促动器虽然抑制震动能力差,但加以应用适当的反馈机制以及合理的算法控制,可改善其抗扰性能。受促动器整体刚度的影响,负载变化会引起促动器结构伸长或缩短,使促动器输出位移偏大或偏小。而柔性促动器依靠位置传感器确定步长,其动作量只服从传感器信号,不受促动器变形影响,故理论上处于绝对刚性。
3.5 微位移促动器的测试
微位移促动器在试制完成后要经过一系列的测试,以检测其是否满足设计要求。针对促动器的分辨率,可多次测量促动器最小步长然后求平均值,或在检测分辨率不足的情况下,每次测量最小步长的若干倍,最后计算分辨率。对促动器的平均定位精度,应多次测量任意方向、任意步长的定位误差,最后计算其平均值作为平均定位误差。对于柔性促动器,因其为闭环控制,故其定位结果在设定值左右波动,应对其稳定时的平均波动误差和运动时的平均波动误差进行测试。此外,随着望远镜口径的增大,还应考虑风载带来的扰动和望远镜结构的震动,所以应对促动器进行风载和震动的抗扰性测试。
4 结论及展望
目前10米级望远镜微位移促动器的行程均在2 mm以内,且均为刚性促动器。若将其行程扩大,将会导致传动机构的缩放比过大,或导致缩放之前的行程过大,以致累积误差增大。而杠杆由其缩放比例和杠杆大小相关,且过大的缩放比例也会导致输入和输出位移的非线性,使其进一步应用受到限制。然而多年的实际应用证明,传统的刚性促动器具有相当优异的可靠性,对于机构固有的摩擦、滞后、爬行和变形等影响,可通过在输出轴增加位置传感器的方式加以改善,以期实现未来望远镜所需要的大行程。而对于抑制望远镜结构中的振动问题,可选择应用主动阻尼技术,或改用结合音圈电机的柔性结构。音圈电机由其具有高精度、高灵敏度和高带宽等性质,使其能够解决机械振动和风载等带来的扰动,适合在微位移促动器中开展更深入的应用。
随着望远镜口径的不断增大,对促动器性能要求也变得更高。既要求其满足超高的精度要求和超大的行程要求,又要同时兼顾功耗要求和预算要求,以及一定的抗扰能力。同时因其维修和更换的不便性,使系统应具有更高的可靠性及更长的寿命。设计符合发展要求的微位移促动器仍然具有很大挑战。国内在拼接镜面微位移促动器设计方面的经验不多,考虑到未来自主大口径望远镜的发展,应该在促动器方面做进一步的探索。
