基于快速控制原型的气动伺服系统实验教学平台设计
2021-03-09孟德远李顺利陈冬梅
孟德远 李顺利 陈冬梅








摘 要 为加强控制工程基础课程的实验教学,设计气动伺服系统实验教学平台,详细介绍平台的结构。采用快速控制原型技术,设计系统机理分析建模与实验验证、系统辨识与频率特性、系统校正三个实验,学生不用编写复杂的底层程序,专注于理论实践,有助于提高实践教学质量。
关键词 控制工程基础;快速控制原型;气动伺服系统实验教学平台;MATLAB;Simulink
中图分类号:G642 文献标识码:B
文章编号:1671-489x(2021)04-0026-04
Design of Experimental Teaching Setup for Pneumatic Servo System based on Rapid Control Prototyping//MENG Deyuan, LI Shunli, CHEN Dongmei
Abstract In order to improve the quality of the experimental tea-ching for the course Introduction to Control Engineering, an experi-mental setup of pneumatic servo system is designed and introduced. By using the developed setup, system modeling and validation expe-riment, system identification and frequency response experiment, and control algorithm experiment are developed. Since the rapid con-trol prototyping technology is employed, students can focus on theorypractice, other than the complex coding job.
Key words introduction to control engineering; rapid control proto-typing; experimental teaching setup of pneumatic servo system; MAT-LAB; Simulink
0 前言
控制工程基础是机械工程专业的主干课程,主要讲授控制系统的动态数学模型、时域瞬态响应分析、频率特性、稳定性分析、误差分析和计算、综合与校正等内容,对学生继续学習与机电控制相关课程及从事机电一体化工作非常重要[1]。该课程具有内容丰富、概念抽象、过程理解及学以致用难度大等特点,为激发学生学习兴趣、提高教学效率,各高校普遍重视实验教学质量。但目前课程实践教学内容和平台数量存在显著不足,在教学过程中大多让学生使用运放电路模拟典型环节并进行瞬态响应、频率特性和系统校正实验,与机械专业脱节严重[2-3]。为避免课程教学和专业背景的割裂,迫切需要构建新的实验平台,培养学生建立机电系统数学模型、分析系统动态性能和设计机电系统控制器的能力。
与电气和液压系统相比,气动伺服系统复杂程度适中且安全可靠,非常适合用作机械专业学生的控制课程实践教学。此外,气动伺服系统因具有功率—质量比大、清洁、结构简单、易维护等优点,在机器人、工业自动化和医疗器械等领域应用广泛[4-5]。因此,本文开发基于气动伺服系统的控制实验教学平台,为让学生免去编写复杂的底层程序,从而专注于系统建模、特性分析、控制器设计与验证,该平台采用快速控制原型(Rapid Control Prototyping,RCP)技术。
1 气动伺服系统实验教学平台架构
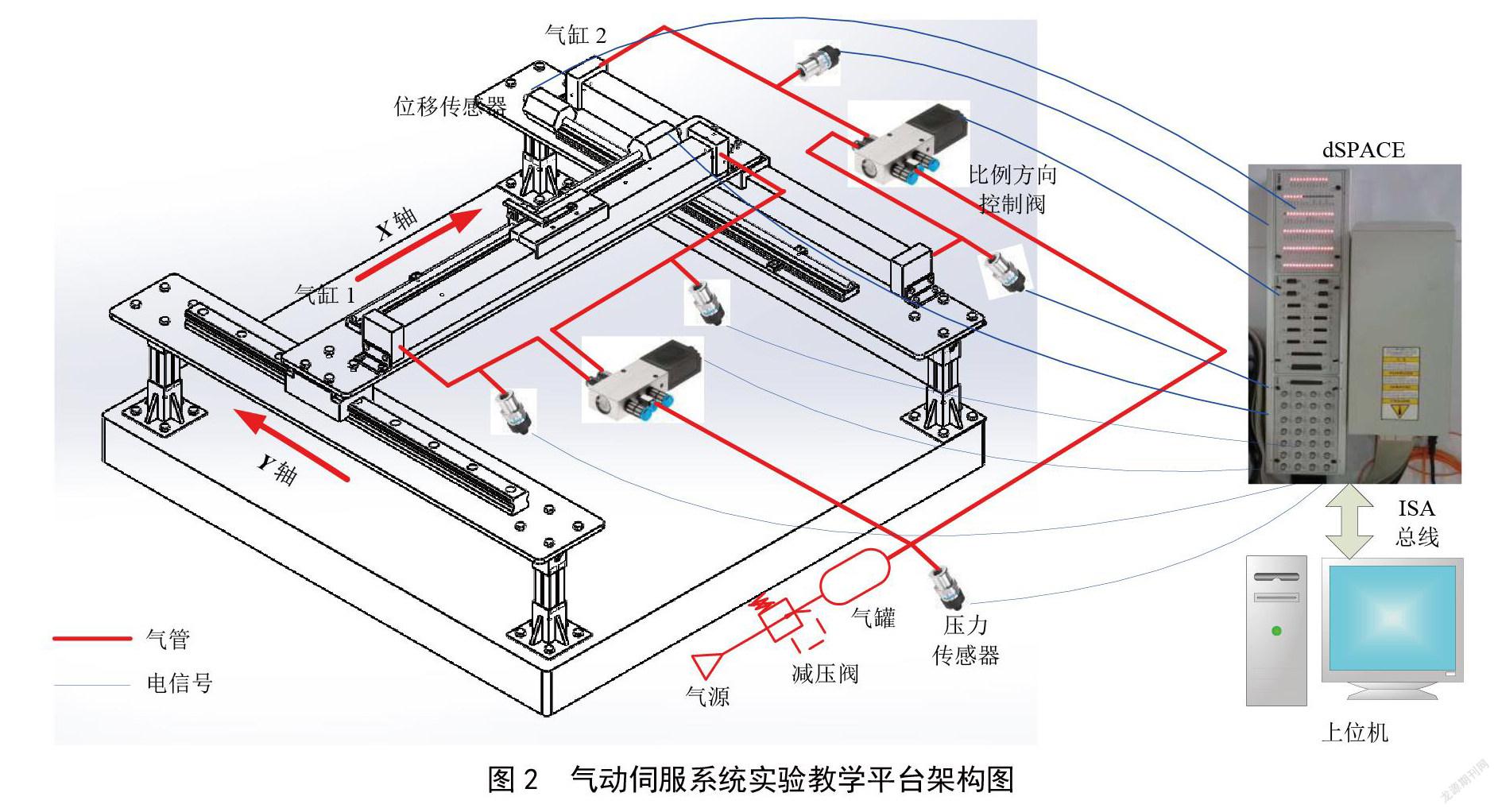
图1是本文搭建的气动伺服系统实验教学平台,图2是系统架构示意图,两个无杆气缸(DGC-25-500-G-PPV-A)垂直布置,X轴驱动气缸在上,一端与Y轴驱动气缸的滑块固定,另一端与滑动导轨相连。末端执行器固定于X轴驱动气缸的滑块,该平台可以控制其在X—Y两个方向500 mm×
500 mm范围运动。两轴的驱动气缸各由一个Festo公司的比例方向控制阀(MPYE-5-1/8-HF-010B)控制,气缸两腔压力及控制阀供气口的压力由Festo公司的压力传感器(SPTW-P10R-G14-VD-M1)检测,采用MTS公司的磁致伸缩位移传感器(RPS0500MD601V 810050)测量气缸活塞的位移和速度。位移测量重复精度小于±0.001%FS(最小±2.5 μm),速
度测量精度为0.1 mm/s,压力测量精度为±1%FS。气源压力由三联件调节,并利用一个14 L的气容保证比例方向控制阀在工作时供气口压力不出现大的波动。
各传感器信号的读取和控制算法的实现利用dSPACE(DS1103)系统完成。dSPACE的代码生成工具TargetLink可以直接MATLAB/Simulink/Stateflow生成代码。Control-Desk试验工具软件包可以与实时控制系统进行交互操作,如调整参数、显示系统的状态、跟踪过程响应曲线等,提高实验效率。
2 实验流程
本平台采用的快速控制原型系统采购自德国的dSPACE公司,主要包括实时控制器(DS1103)一套、数据采集与实验管理软件(ControlDesk)一套、控制器硬件I/O接口库软件(Real-Time Interface rti1103)一套。I/O接口库实现实时控制器硬件与MATLAB/Simulink的无缝连接,利用Simulink的图形化编程环境,学生可以很容易编程操控实时控制器,从而获取各传感器的测量值,同时控制比例方向控制阀。ControlDesk用于对实验过程进行综合管理,可以与实时控制器进行交互操作,功能包括对实时硬件的可视化管理、建立和管理虚拟仪表、变量的可视化管理、控制参数在线调整、实验过程的可视化管理等。利用上述工具可以完成系统建模、分析、控制器性能验证等全部实验,过程如图3所示,具体步骤如下。
1)根据具体实验目的和方案,将需要使用的传感器接至DS1103的模拟量输入口(AI),将比例方向控制阀的控制电缆与DS1103的模拟量输出口(AO)相连。
2)利用Simulink编写程序:从I/O接口库导入步骤1所用AI口对应的A/D模块,获取传感器数据;控制算法使用Simulink模块库,通过图形编程实现,根据传感器测量的系统状态决定控制量大小;从I/O接口库导入步骤1所用AO口对应的D/A模块,将控制量转化为电压信号施加给比例方向控制阀。
3)基于MATLAB/Simulink的Real Time Workshop技术和dSPACE的代码生成工具TargetLink,对步骤2编写的Simulink框图程序进行RTW Build,生成可执行代码并下载至实时控制器。
4)利用ControlDesk对实验进行管理,完成控制参数调整和状态参数的获取。
5)利用MATLAB对实验数据进行处理和分析,优化控制算法,返回步骤2。
3 实验内容设计
考虑控制工程基础课程内容和实验课时,利用搭建的气动伺服系统实验教学平台,本文设计系统机理分析建模与实验验证、系统辨识与频率特性、系统校正等三个实验。
系统机理分析建模与实验验证 此实验要求学生使用机理分析方法建立系统的线性数学模型,并对模型进行实验验证。首先要求学生参阅文献[5]完成气动伺服系统的机理建模,然后利用理论课讲授的非线性模型的线性化方法,计算求得系统的传递函数模型:
式中n0、n1、d1、d2、d3、d4为与系统结构参数有关的变量,具体计算公式见文献[6]。
编写图4所示程序,利用仿真和实验分别获得系统开环和闭环瞬态响应,通过结果对比验证模型的正确性,如图5所示,并分析结构参数对瞬态响应的影响以及模型误差的产生原因。
系统辨识与频率特性 系统辨识是用系统的输入输出数据所提供的信息来直接建立系统的数学模型,气动伺服系统是开环不稳定系统,故需要采用闭环辨识方法,图6为程序示例。通过闭环控制使气缸定位到期望工作点附近(简单的P控制即可),然后加入噪聲信号(M序列,循环周期255、由8位移位寄存器产生,幅值为1.5 V),使气缸在工作点附近运动,采集比例方向阀的控制输入和气缸的位移,利用MATLAB的System Identification工具箱进行辨识,得到系统在该工作点附近的传递函数模型。
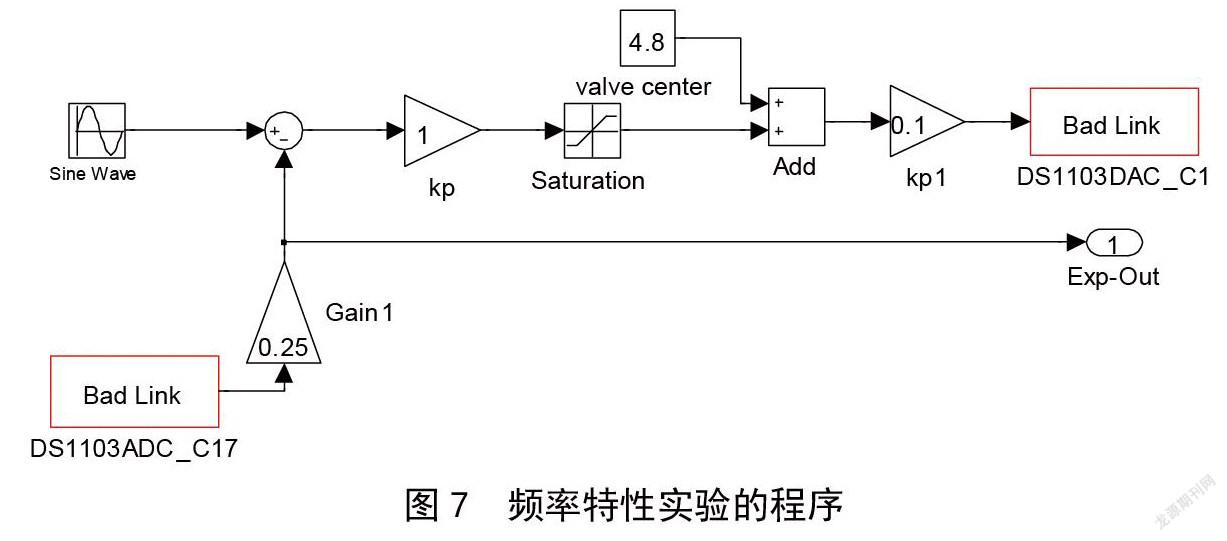
系统辨识建模还可以通过频率特性实验实现,程序示例如图7所示。与上面类似,首先通过闭环控制使气缸定位到期望工作点附近(简单的P控制即可),然后利用MAT-
LAB的“idinput”命令产生一个正弦和信号(由1 000个正弦频率分别在0.01~100 Hz区间的正弦信号叠加)给系统。采集比例方向阀的控制输入和气缸的位移,用“fft”命令计算系统输入和输出的波谱(Spectrum),然后将数据导入System Identification工具箱求解系统的频率特性曲线。
系统校正 首先让学生尝试理论教学所讲授的校正方法。气动伺服系统为I型系统,理想情况下可实现零定位误差,实际因为受摩擦力影响,存在稳态误差。为减小稳态误差,必须增大增益,但由于阻尼比较小,容易引起超调、震荡,增益过大时,系统会失稳。为了在系统稳定前提下进一步提高增益,可以对系统进行滞后校正(PI控制),即添加一个(1/4~1/5)ωn零点和一个(1/40~1/50)ωn极点,程序示例如图8所示。校正后系统阻尼特性仍然很差,获得高稳态精度的代价是超调大,即瞬态性能差,如图9所示。
4 结语
气动系统具有很多不利于精确控制的弱点,如强非线性、参数时变性和模型不确定性等,所以采用经典控制理论讲解的校正方法,系统性能肯定不理想。借助本实验平台,结合工程实际问题的分析通过实验开展实践性启发教学,鼓励学生在基本实验的基础上尝试运用先进的控制算法来提高控制性能,可以提高学生学习的热情,增强学生的创新意识。■
参考文献
[1]董景新,赵长德,郭美凤,等.控制工程基础[M].4版.北京:清华大学出版社,2015.
[2]张兵,钱鹏飞,张立强,等.基于快速原型的“控制工程基础”课程教学改革与实践[J].教育现代化,2020(36):75-77.
[3]邵强,葛平淑,张江燕,等.《控制工程基础》课程的教学改革与探索[J].高教学刊,2017(3):116-117.
[4]陶国良,刘昊.气动电子技术[M].北京:机械工业出版社,2013.
[5]孟德远.气动伺服位置控制[M].北京:科学出版社,2020.
[6]陶国良.电—气比例/伺服连续轨迹控制及其在多自由度机械手中的应用研究[D].杭州:浙江大学,2000.
3588501908251
