走航式ADCP测流精度控制措施研究
2021-03-08王德维张巧丽
王德维, 华 晨, 李 巍, 张巧丽
(1.江苏省水文水资源勘测局连云港分局, 江苏 连云港 222004;2.江苏省水文水资源勘测局常州分局, 江苏 常州 213022)
1 原 理
ADCP是利用声学多普勒频移效应进行流速、流量测验的测验系统,一般由ADCP、计算机、电源和数据处理软件等组成[1]。换能器向水中发射固定频率的超声波脉冲,当碰到水中的散射体(浮游生物,泥沙等)反射回波被接收。当散射体有相对运动,其反射的声波在频率上有一定的变化(频移)。由河底或海底的回波测量河底或海底相对于ADCP的运动,它是通过河底回波多普勒频移来计算船速称为底跟踪。通过跟踪水中的颗粒物的运动测得水流相对ADCP的速度,称为水跟踪。
两个基本假设为:
(1)反射声波信号的浮游物体(泥沙、微生物等)是随着水流运动的。
(2)所有4个ADCP波束都在测量同一个流速矢量,即流速在一个小范围的同一水平面上是不变的。
2 存在的问题
(1)无处鉴定,不做比测,目前国内采用的仪器都是进口的,国内还没有鉴定机构,使用者常年也不做比测,认为测出的结果就是正确的。
(2)参数设置不合理,不能根据河流的水文特性,合理选择单元深度、单元数目、最大水深、最大流速及测流模式等,导致测量成果不合理。
(3)实测部分只有30%~50%,盲区推算方法选择不合理。
(4)忽略动底,直接采用ADCP底跟踪施测值,导致测量值偏小。
(5)使用者技术水平参差不齐,在安装、选型、施测过程中,不能按照规范进行,导致测量误差偏大。
3 精度控制措施
3.1 ADCP选型合理
目前,常用的ADCP频率有300 kHz、600 kHz、300 kHz及1 200 kHz。频率越高,穿透性越差,越不容易穿透高含沙量的水流,能测得水深也越小,但精度较高;频率越低,穿透性越强,越容易穿透高含沙量的水流,能测得水深也越大,但精度较低。因此,水深与泥沙含量决定了ADCP频率的选择。
在选择ADCP频率时,要综合考虑断面水深及泥沙含量等水文特性和精度要求[2]。当水体中泥沙含量导致施测不到深度时,建议选择频率更低的ADCP。
3.2 安装要求严格
3.2.1 ADCP
采用船测时,ADCP探头安装可以采用船头、舷中部边装和内部安装3种方式。ADCP换能器应垂直安装,纵摇和横摇的偏角宜≤2°,正向(一般为换能器箭头的指向)指向船头,应尽量与测船中轴线平行[3],换能器入水深度按船舶晃动不露出水面为宜,避免露出水面、发生空蚀现象。
若晃动较大不同波束施测的水深将相差较大,导致判断近水底层流速时因不同波束计算的数据不在同一水层而误差超限出现错误,还导致近底层空白区增大。ADCP探头安装不水平会出现的问题主要是数据出错,特别是盲区增大。一般情况下到底层附近剖面流速变化大,误差大于阈值的可能性就会增多,导致数据错,出现盲区大。
3.2.2 GNSS
天线安装在ADCP探头垂直上方,能正常接收卫星信号,目的是测量的船速代表ADCP探头运动速度。天线安装不在垂直上方时,在测船转弯时,因角速度不同底跟踪和GNSS施测的船速将不一致,导致GNSS施测的速度不能代表ADCP探头的运行速度。
当ADCP数据采集软件中有GNSS天线位置改正设置功能时,天线可以不在垂直上方。
3.2.3 外部罗经
当内部罗经无法正常使用时,需要接外部罗经,外部罗经要与ADCP刚性连接,不能晃动,保证安装后能代表ADCP的转动方位。如罗经安装在船顶,那么ADCP绑在船上一定要牢固,否则罗经不能代表ADCP的方位。
3.3 参数设置有效
3.3.1 深度单元尺寸
深度单元尺寸(WS)应根据型号和测流模式设置,见表1,例如当采用600 kHz型号WM1测流模式时,深度单元尺寸为50 cm,设置命令为WS50。
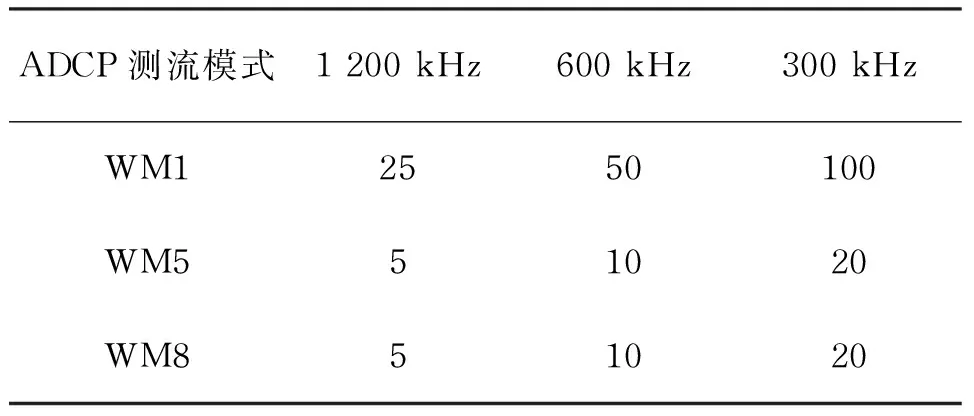
表1 ADCP深度单元大小 单位:cm
3.3.2 深度单元数目
深度单元数目(WN)是设置垂直剖面上记录水层的单元个数,它可通过断面最大水深和测深单元尺寸计算求得。命令格式:WNnnn,在标准模式下,记录水层的单元个数为1~128。深度单元记录数目:nnn= 最大深度/WS。但在实际情况下,可以增加几个,提高数据记录的安全性。若深度单元记录数目设置偏少,这样超过深度的流量数据将不再记录,造成记录不完整。当计算的记录水层的单元数超过128个,可将WS适当增大后重新计算。
3.3.3 断面最大水深
断面最大水深(BX)是设定底跟踪断面最大搜寻深度的命令,单位为dm,原则上推荐是断面最大深度的1.5倍,在现场如含沙量过大无法探测到河底时,可以适当加大搜寻深度,也是增大ADCP的发射功率。
如该命令设置偏小时,当大于该水深的地方将导致底跟踪失效,无法施测流量。
3.3.4 测量模式
TRDI公司生产的ADCP通常包括2种工作模式:标准模式(例如“瑞江”ADCP模式1)和浅水高精度模式(例如“瑞江”ADCP模式5、模式11)[4]。标准模式即宽带模式,浅水高精度模式即脉冲相干模式。标准模式流速测量范围大,剖面深度大,适用于大多数情况。浅水高精度模式流速测量范围小,剖面深度小,但流速测量精度非常高,其流速测验短期精密度可达mm/s的量级。因此,当流速很低(例如:流速<10 cm/s)且水深较浅的情况,采用浅水高精度模式效果特别好。
对于在标准模式(WM1)下无法施测全断面流量时,可采用以下方式施测:
(1)标准模式(WM1)边滩水浅导致ADCP无法施测数据时,可采用浅水模式(WM5)动船或定点施测。
(2)当ADCP无法施测时,可在流速垂线上采用转子式流速仪施测。
3.4 动底测验方法正确
当河流含沙量较大,特别是流速较大时,导致ADCP一定频率的测定的“底”是沿河床运动的即河床上面的泥沙是运动的,此种情况称为动底。动底时,常规的底跟踪方式施测流量偏小,宜采用回路法、定点多垂线法和差分GNSS法等。
3.4.1 回路法
回路法就是利用ADCP自身的底跟踪(BTM)功能在断面连续施测一个来回[5],但开始和结束必须是同一位置,通过观测导航面板中直线距离和回路施测历时,利用公式(1)就可以计算出断面的“动底”平均速度,再将“动底”平均速度乘以断面面积就是因“动底”偏小的流量,最后加上实测流量就得到断面真实流量。
(1)
Q=Q′+VmbA
(2)
式中:Vmb—一个来回的“动底”速度,m/s;DUP—一个来回同一位置因“动底”原因向上游的距离,m;T—一个来回的所用的时间,s;Q—断面修正后的流量,m3/s;Q—断面实测的流量,m3/s;A—断面的面积,m2。
回路法前提是内部罗经要校正,至少要达到线性变化,否则不能用此方法。优点是不需要 DGPS、实施方便、计算简便等,但是其精度取决于起点与终点重合,罗盘必须精确标定,断面必须垂直于主流向,必须保持底跟踪。
3.4.2 定点多垂线法
将ADCP当作流速仪用,采用定点测量。根据水文特性布设一定数量的测速、测深垂线,计算每条垂线的平均流速和部分面积,进而求得部分流量和断面流量。
该种方法具有不需要GPS,与流速仪法相似等优点,但需要人工定位,必须考虑流向,保证ADCP不移动且费时,不适用航运繁忙的河流。
3.4.3 差分GNSS法
差分GNSS法就是利用差分GNSS代替底跟踪测量船速[3]。采用外接GNSS方式施测的流速与磁偏角有直接关系,若内置罗经确定大地坐标与GNSS大地坐标之间偏角差异较大,则测流误差较大、精度较低。这样对于外接罗经的精度要求就显得更加重要。外接罗经校正方法为:
(1)在一固定断面进行一测次(往返)ADCP施测。
(2)采用试错法将安装外部罗经偏移量或磁偏差输入相同值后检查往返轨迹图,直至满足有校正后的轨迹图要求。
(3)通过断面往返用试错法找出满足“跟踪相对GNSS轨迹线不能有向下游的趋势”的角度。
3.5 施测过程规范
(1)在起点位置应调整好航向,听到出发信号后,方可开始。
(2)声学多普勒流速仪施测流量应在满足水深条件下尽量靠近岸边。
(3)单次横渡施测时尽量保持匀速和船首方向一致,施测时间不应小于180 s,船速不宜大于2.5 m/s。需要挑选垂线测点流速时,应在每条垂线一定半径范围内(根据断面宽度和流速变化情况确定)至少采集4组有效数据。
(4)当两边垂线因测船吃水深和多普勒流速仪盲区等原因无法施测流速时,应在满足多普勒流速仪施测前提下在边界增加测量垂线,并尽可能将位置固定。
(5)在起、终点位置停留时间不少于5组(次)脉冲信号,并在流量计算参数中设定。
(6)航迹应尽量与测流断面线重合。
(7)为减少因水流脉动带来的影响[6],航次应满足以下要求:流量测验应施测2个测回(往返各2次),任意一次BTM和GGA模式下流量与平均值的相对误差不应大于5%,否则补测同向的一个测次流量。当断面流场出现顺逆不定或流量小于某值时,可不考虑单次流量间的相对误差(需主管技术部门批复),流量以施测2个测回的均值为准。当BTM模式和GGA模式断面流量误差超过±1%时,则应采用GGA模式下流量作为断面流量。
4 结 语
河流流量测验是水文工作者的重要任务之一,ADCP流量测验方法的发明被认为是河流测验领域的一次革命,比传统的河流测验方法效率提高了十几倍,它标志着河流流量测验的现代化[7]。但是必须全面了解其基本原理和操作要点,严格执行测验规范要求,才能正确应用ADCP测流,才能保证测验结果的精度要求。
