一种基于气动压痕原理指掌纹自动捺印装置的设计与实现
2021-03-08黄子煜
黄子煜,黄 伟
(福建警察学院, 福建 福州 350007)
0 引言
指掌纹捺印包括十指平面捺印、三面捺印、掌纹捺印等,是刑事犯罪侦查活动中必不可少的一个环节,同时也是一项技术性要求很强的专业工作。指掌纹捺印的质量直接影响到指纹的分析、编码、储存、比对和鉴定的结果[1-2]。长期以来人身指掌纹采集通常由人工完成,这对捺印人员提出了较高的要求,需要掌握指纹学专业知识和捺印操作的专业训练,这有赖于捺印人的经验。如果没有经过系统的学习培训,对捺印指纹学知识一知半解,没有正确掌握捺印操作中的方法和技巧,往往会导致所捺印的样本不满足检验鉴定要求[3]。潘自勤等研究表明,指纹的边缘形态、宽窄、细点线受捺印压力等形成条件的影响变化较大[4]。另外,办案实践中可能涉及的被捺印人员类型非常复杂,包含了各个行业的人员,其手指皮肤情况也很复杂, 为获取高质量的捺印指纹,还需要工作人员具体情况具体对待,细心总结经验不断摸索,才能取得理想的效果[5]。
在公安实践中,人工捺印方法的缺陷主要包括:受捺印人的技术经验和操作细节的影响比较大,捺印效果很难控制[6],常因捺印力度或速度不均匀,或被捺印人配合度不高、遇特殊捺印对象(如僵化的尸体)等情况,从而造成指掌纹模糊不清、捺印不完整、出现变形等情况[7],从而严重影响了指掌纹证据采集的质量,使得很多指纹无法正常建人计算机指纹自动识别系统中,在比对案件时无法使用,给侦查工作带来很大的困难[8]。
随着时代的进步和科技的发展,指掌纹自动捺印技术走入我们的视线之中。而现有采用光学扫描法等的自动捺印设备存在体积较大不易携带、程序设置复杂、成本高等缺点,同时这种光学扫描方法所采集的指纹还存在丢失细节特征或增加伪特征等特征变异问题,直接影响指纹的采集质量及指纹检索的精度[9],使现场指掌纹的自动捺印技术的推广应用受到了很大限制。
因此,研究指掌纹自动捺印的新方法和新装置具有重要的现实意义。本文提出了一种基于气动压痕原理的指掌纹自动捺印方法,设计一款面向便携、可控、低成本的现场指掌纹自动捺印装置,以期为案件现场取证工作提供科学、高效的指掌纹样本收集手段,提高采集的质量和效率。
1 装置构建方法和设计思路
如前文所述,目前用于法庭证据和检验鉴定的指掌纹样本仍采用油墨捺印的方式进行采集[9],为更好与法庭证据形式相适应,我们在进行装置设计时,采用油墨捺印法进行指掌纹信息转移原理的基础上,对捺印操作的实现过程和自动化装置创新设计。
1.1 拟解决的主要技术问题
1.1.1 捺印操作和效果
由于人的手指有弹性, 在指掌纹捺印过程中(特别是三面捺印)用力不同,造成的变形也不同[8]。这不但对捺印人操作规范要求高,还常常由于被捺印人在捺印过程中的不适应或不配合等原因,造成的指掌纹样本纹线出现扭曲变形、不清晰、不完整等情况;而对于尸体指纹的捺印,还存在客体僵化等情况,手指间不易分开,难以拉伸,捺印工作更加困难、合格率更低,且一人难以完成[1],这些情况大大影响了传统手印样本采集的可靠性和准确性。
1.1.2 现场便携捺印
针对光学扫描法等自动捺印设备体积大、成本高,无法适用于现场的指纹捺印需求的情况,设计一款在现场条件下使用的快速、可靠的指掌纹自动捺印装置十分必要。
1.2 装置设计思路
通过对指掌纹自动捺印方法进行了深入研究,提出了如下的指掌纹自动捺印装置的设计方案:装置基于气动压痕原理,先将转印材料设置于气动压痕包裹带上,通过微型气泵对气动包裹带充气,使蘸有油墨的待捺印手指/手掌与转印材料进行充分接触、均匀受力,压力通过薄膜压力传感器实时反馈至控制系统,从对气泵的充放气进行精确控制,实现指掌纹的自动捺印。
装置自动捺印流程设计示意图、应用结构图如图1、图2所示。
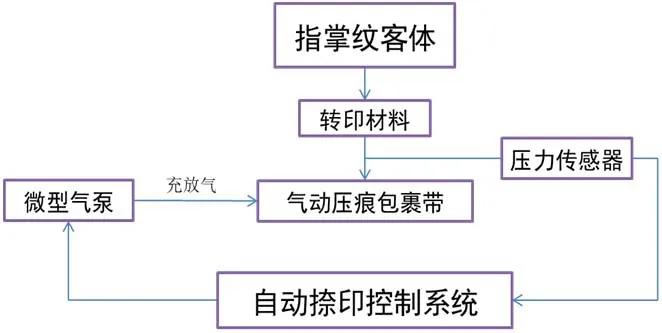
图1 装置自动捺印流程设计示意图Fig.1 schematic diagram of the automatic printing process design of the device
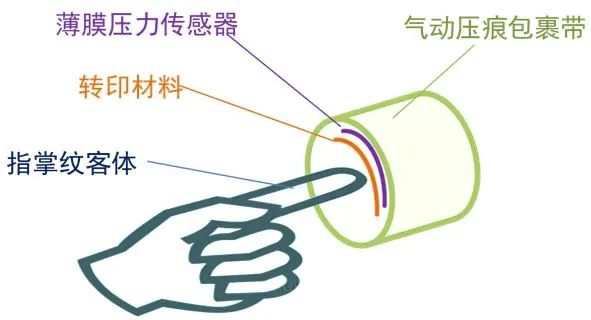
图2 自动捺印装置应用结构图Fig.2 structure drawing of automatic printing device for finger-palm marks
2 装置控制系统功能的实现
装置的控制系统硬件设计遵循模块化设计思路,各个部分相对独立,具有标准接口,主要分为:电源模块、主板模块、通讯模块、显示模块等,功能结构见图3所示,主要部件包括MCU、按键模块、显示电路模块、存储器、以及通讯接口等。
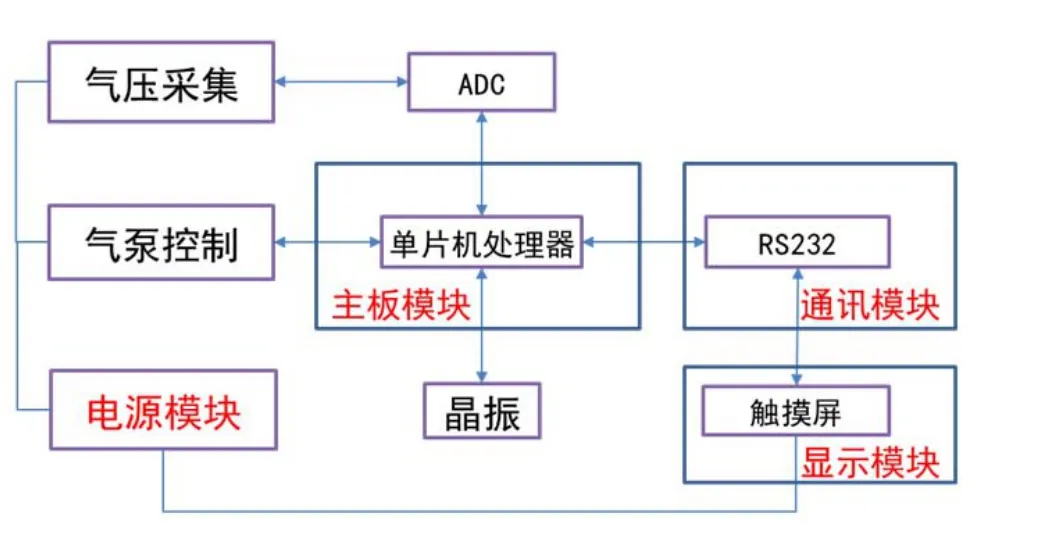
图3 硬件功能结构Fig.3 structure of hardware function
2.1 系统电路设计
主板控制模块(MCU)基于ARM芯片STM32实现,它可以作为一种连接纽带,将执行模块与控制模块相连,实现智能化控制[10]。主板CPU采用STM32S103单片机,该单片机包含12 MHz的晶振、内嵌出厂前调校的8MHz RC振荡电路、内部40 kHz的RC振荡电路、用于CPU时钟的PLL、POR、PDR和可编程的电压探测器(PVD)[11]。
系统的电源为+5V,单片机为+3.3V供电,因此,对提供的电源电压(+12V)要进行直流降压设计,在电路中采用专用开关电源芯片TPS5430、LT1763稳压芯片实现降压电路模块设计。
2.2 系统控制设计
基于实现指掌纹自动捺印的设计目标,即只需将要捺印的手指/手掌(蘸有油墨)放置在装置气动包裹带所围成的圆柱面内部,待捺印部位置于转印材料对应位置上,接通电源,启动微型气泵对气动包裹带充气;气动包裹带随着充气量的增加逐步鼓起,对指掌纹形成挤压,同时通过设置于气动包裹带内侧的薄膜压力传感器,实时监测转印材料与指掌纹间的相互作用的压力大小,并实时反馈至控制系统,达到预设的压力值后稳定一定时间,使转印材料与指掌纹乳突纹线上的油墨进行可控、精确的接触加压控制,实现指掌纹在转印材料上形成清晰、均匀的纹线效果;之后释放包裹带气体,解除压力后启动包裹带收缩,并与手指/手掌分离,将手指/手掌取出即可完成自动捺印过程,转印材料上即获得被捺印客体的指掌纹。系统主程序流程如图4所示。

图4 系统主程序流程图Fig.4 the flow chart of this system
其中,我们以PWM的方式实时调节微型气泵电机运转的速度[12],从而实现对气动压痕包裹带的充气量和充气速度的精确控制。
采用这种方法,整个指掌纹的捺印过程可自动完成,并实现捺印过程中压力、时间等参数的可控、精准控制。
2.3 显示模块设计
显示模块采用DMG80480C043_02WN (DWIN Technologies)电阻触摸屏进行开发。该显示器串口屏的软件设计主要在 DWIN DGUS开发软件下完成。软件界面功能主要包括气动压痕包裹带预设压力值的输入、压力数值显示、压力系数设置(包含斜率k和截距b,可将压力传感器电位信号的标定为压力值)、气泵电机转速显示等,软件设计开放界面如图5所示。
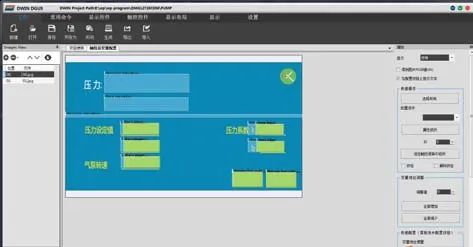
图5 串口屏软件设计界面Fig.5 design interface of software for serial screen
3 结论
本文所设计的基于气动压痕原理的指掌纹自动捺印装置,在捺印原理和实现方法上进行了创新,并具有以下优点:(1)自动采集方式不需要捺印人与被捺印人进行肢体接触,在避免被捺印人不配合的情况下也能让其在心理上有较好的接受度,最重要的是这种捺印过程不会受到捺印双方手指移动、情绪等主观因素的影响,捺印的一致性、稳定性都得到较好的提升。(2)通过本装置有望实现手指三面捺印、十指平面捺印和全手掌三种捺印方式,可以提取到被捺印人的指背纹路等更丰富的指掌纹生物特征信息。(3)相比较于光学扫描方法等其他自动指掌纹捺印仪器,本装置构成简单,体积较小,操作上较为简易,方便快捷,同时与传统的油墨捺印方法在中介物质的采用方面也是一致的,能够较好适应现场指掌纹快速自动捺印的实践需要。
当然,本装置的设计和实现过程中,由于研究条件所限,装置的控制精度和稳定性方面还有待提高,今后我们将逐步完善装置的各个部分的设计细节,并通过捺印实验进行验证,进一步提高指掌纹自动捺印的性能和质量,以期为案件现场勘查和人身指掌纹生物样本信息采集工作提供快速、可靠、便携的指掌纹物证信息采集新技术和新手段。