无人机倾斜摄影技术在大比例尺测图中的应用
2021-03-08周伶杰王继琮
林 洪,周伶杰,王继琮
(1.江西省地质科学研究所,江西 南昌 330000;2.江西省地质局赣西地质调查大队,江西 南昌 330000)
传统的大比例尺(1:500、1:1000、1:2000)测图主要采用外业实测的方法,采集要素多,外业时间长,作业效率低,人力消耗大,成本较高,难以满足目前快速发展的要求[1,2]。近年来,随着无人机技术和图像处理技术的快速发展,无人机倾斜摄影技术逐渐发展成测绘行业的一项新技术。与传统的测绘作业模式不同,无人机倾斜摄影技术具有高效快捷、成本低廉、灵活便捷、精细准确、上手简单、操作方便等优点,在城市更新[3]、水土保持监测[4]、生态修复[5]、矿山地形测量[6]等领域均得到广泛应用。
1 无人机倾斜摄影技术
1.1 工作原理
无人机倾斜摄影技术[7]有别于传统的航空摄影技术,它融合了正射影像和倾斜影像,弥补了正射影像的不足[8],其原理是借助无人机平台搭载的航摄仪同时从多个不同角度获取高重叠度同一地物的环绕立体影像,以得到地面物体完整准确的立面信息[9],并经过相关专业软件处理后获得数字表面模型(Digital Surface Model,缩写DSM)、数字正射影像(Digital Orthophoto Map,缩写DOM)、三维模型和数字线划图(Digital Line Graphic,缩写DLG)等[10],形成最终测绘成果。
1.2 优势
与传统摄影技术相比,无人机倾斜摄影技术的优势有:①外业劳动强度低、人力投入少、生产成本低;②响应速度快、作业效率高、应急能力强;③能够获取全面的立体信息,能从多方面真实地反映地物实际情况[8];④后期成果种类丰富,适用行业范围广。利用无人机低空摄影可获取高清立体影像数据[11],并经相关三维处理软件自动生成三维实景模型,获取准确的地理参考三维模型,快速得到地理空间信息,以满足测绘地理信息领域的应用。
2 基于无人机倾斜摄影数据获取流程
无人机倾斜摄影数据获取步骤主要分为外业数据采集、内业数据处理和影像成果输出三个环节[12]。基本技术流程包括:工作区资料收集与分析、野外像控点布设、无人机航空摄影、三维实景模型建立、内业数据采集处理、成果提交等[13]。
3 外业数据采集
3.1 无人机系统
大疆精灵4RTK是大疆公司2018年发布的一款小型多旋翼高精度航测无人机,集成RTK模块,拥有强大的抗磁干扰能力与精准定位能力,能实时进行厘米级数据定位,在百米高空的地面采样分辨率可达2.74厘米,大幅度减少了传统航测中所需的地面控制点,简化作业流程,降低作业成本[14],其主要参数见表1。
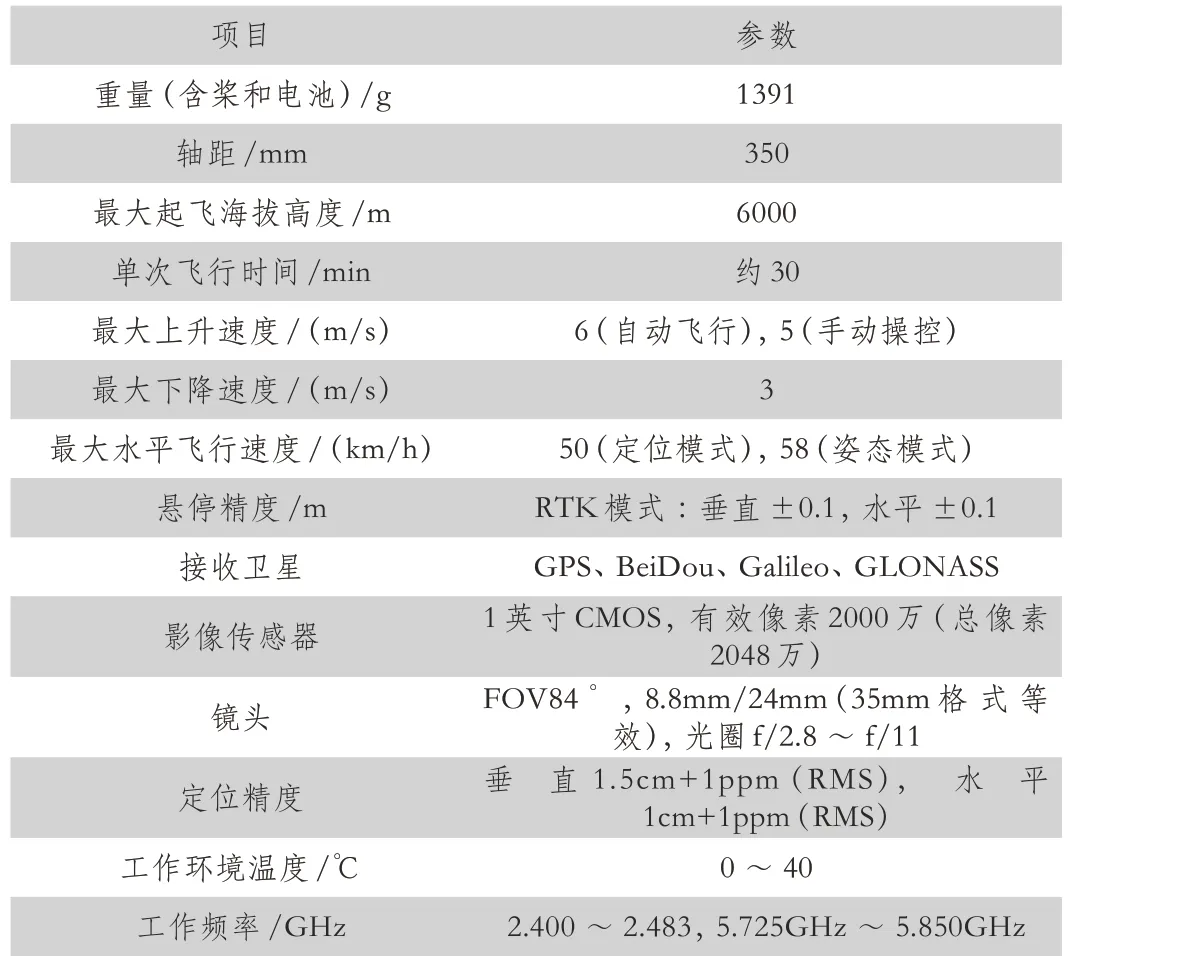
表1 大疆精灵4RTK主要参数一览表
3.2 飞行高度确定
根据《低空数字航空摄影规范》,无人机飞行高度一般由地面分辨率、相机性能进行综合决定,即:

其中:H为摄影航高(m);GSD为地面分辨率(m);f为相机镜头焦距(mm);α为相机像元尺寸(mm)。地面分辨率由测图比例尺决定,不同比例尺的地面分辨率不同,其对应关系见表2,具体选值还应结合地形条件、测图等高距、航摄基高比及影像用途等进行综合确定[15]。
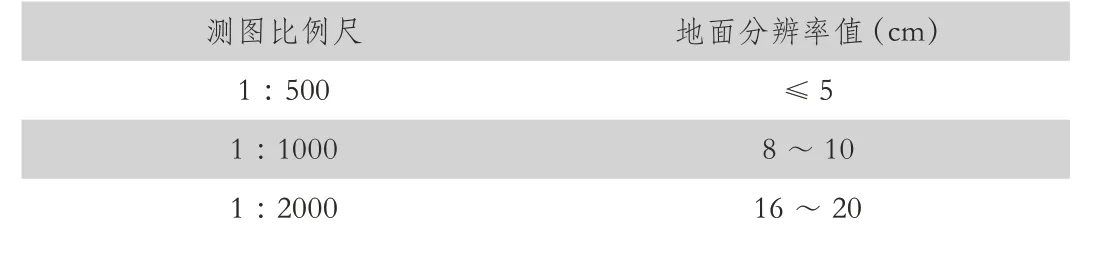
表2 测图比例尺与地面分辨率对应关系表
3.3 重叠率
航摄所获得的最终影像是由2张相邻航片重叠而成的,所获影像之间存在一定程度的重叠,而这种重叠又包括航向重叠和旁向重叠两种[16]。无人机倾斜摄影规范规定,航向重叠度一般应为60%~80%,最小不小于53%;旁向重叠度一般应为15%~60%,最小不小于8%[15]。对于同一个点,不同角度的航拍照片越多,其生成的三维模型精度就越高,但相应的作业时间也会增加,一般需根据测图范围、测图比例尺、影像用途等综合确定航向重叠度和旁向重叠度。
3.4 像控点布设
像控点的布设策略取决于建模精度需求、是否有POS数据辅助、像幅大小等因素[13]。在大比例尺项目的生产过程中,单镜头无人机的POS数据精度较低,每平方千米布设20个左右的像控点和检查点[2]。像控点的位置应尽量选择平整地面明显标志点,与周围地物、环境纹理区分明显,色彩差异大,如斑马线角点、规则花坛内角、平围墙拐角等便于测量观测处;也可使用油漆在地面绘制“L”型标记;或采用像控纸进行布设。
4 内业数据处理
当前内业数据处理主要基于计算机视觉原理,利用二维影像构建三维模型[17],主要技术流程包括:影像预处理、区域网联合平差、多视影像密集匹配、DSM生成、真正射纠正、三维实景建模等。
倾斜摄影拍摄的影像包含垂直影像和多个角度的倾斜影像,属于多视角影像。在处理获取影像的过程中,多数空三测量系统无法准确完成,因而需要通过多视影像联合平差的方法来处理倾斜摄影测量影像。在POS数据、像控点坐标作为倾斜影像外方位元素初始值的基础上,利用金字塔由粗至细的影像匹配方法进行特征点提取,然后对每级影像进行同名点自动匹配和联合平差,得到较好的同名点匹配结果,确保平差结果的精度[18]。多视影像密集匹配与传统的单一匹配不同,其具有涵盖区域广、分辨率高,利用同一地物的多视影像同名点和倾斜影像冗余信息,对其错误匹配进行改正;最大程度的解决遮挡问题,对盲区的地物特征进行补充,尽可能获得同一地物完整准确的三维数据,是获得建筑物三维空间信息的关键环节[19]。多视影像在完成区域网联合平差后可获得多视影像精准的外方位元素,经基准匹配单元的多视影像密集匹配后,便生成测区高密集的三维点云,最后通过构建三角网获得数字表面模型(DSM)[20]。三维实景建模处理主流的自动化软件有Bentley公司的Context Capture、Agisoft公司的Photo Scan、Pix4D公司的Pix4D Mapper等[21],三款软件在硬件要求、操作难度、运算时间、模型精度等方面均有着不同的表现,各有优劣之处。
5 精度评价
精度评价主要采用人工检查和人机交互检查的方式对无人机倾斜摄影技术生产大比例尺测图成果的质量进行检查,可分为相对精度评价和绝对精度评价[1]。相对精度评价是利用已有的大比例尺地形图资料检测实景三维模型、大比例尺测图成果的相对精度;绝对精度评价是通过对比成果影像与采集好的像控点进行精度误差验证,计算点位的平面中误差和高程中误差,得出绝对精度[22]。
6 结论
利用无人机倾斜摄影技术进行大比例尺测图,是大比例尺测图技术的重大进步,野外作业周期短,大大降低外业工作量和工作强度,生成的实景三维模型成果直观、全面、精度高等优势,可根据需要输出多种形式的产品文件,便于项目的生产需要。随着无人机技术和处理软件的快速发展,无人机倾斜摄影技术势必也会得到快速发展和不断完善,应用范围也更加广泛,同时给测绘作业人员带来更多福音,加快测绘行业的高质量发展。
