空间电源系统MPPT升降压调节器研究
2021-03-07孙洪彬赵春阳
张 伟,王 锴,孙洪彬,赵春阳,赵 超
(1.中国电子科技集团公司第十八研究所,天津300384;2.长光卫星技术有限公司,吉林长春130000)
空间电源系统是深空探测器、卫星等空间飞行器电能产生、存储、变换、传输和分配的重要组成分系统,在飞行器全寿命期内为飞行器提供稳定的能量来源,其性能直接决定着飞行器的功率能力以及寿命两个关键技术指标,是空间飞行器不可或缺的组成部分。目前,空间飞行器尤其卫星电源系统,大多采用太阳电池作为空间电源系统的发电单元、蓄电池作为储能单元。空间飞行器在光照期,控制器通过调节太阳电池为负载优先供电,多余能量存储蓄电池;当工作于地影期,蓄电池通过控制器放电,满足负载用电需求,控制器与配电器(PCDU)起着调节太阳电池阵、负载及充电功率平衡的同时完成电源的配电。MPPT 升降压调节器又是空间电源系统控制器与配电器(PCDU)的核心电路,通过成功研制单个MPPT 升降压调节器,利用多个调节器的顺序调控或者多个调节器的并联控制,实现PCDU 单机功率的扩展,本文只针对单个MPPT 升降压调节器进行研究。
1 MPPT 升降压调节器设计
1.1 主功率拓扑
当前,空间电源系统控制器中常用的非隔离升压拓扑有单Boost、交错Boost、He-Boost、Super-Boost、Weinberg 等拓扑电路,非隔离降压拓扑有单Buck、Super-Buck 等拓扑电路,通过以上升降压电路的组合,实现非隔离升降压的拓扑主要有CUK 拓扑,B3R 拓扑及H 桥型拓扑等。
CUK 拓扑可以实现升降压功能,但是CUK 拓扑电路需要两个电感和一个电容(不指滤波电容);输出是负电压;电容作为储能元件,提供电流比较小,增大电容势必使拓扑体积质量增大,因此不适合空间应用。图1 为CUK 拓扑电路图。
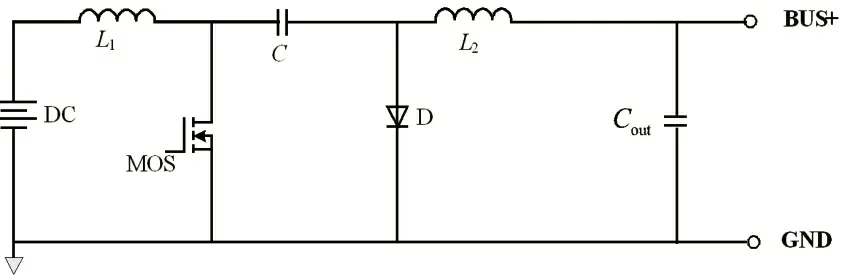
图1 CUK拓扑
B3R 包括三个拓扑[1],在太阳电池阵与储能电池之间为Buck 和Super-Boost 拓扑,在储能电池和母线之间Super-Buck 拓扑。实现升降压为Buck 和Super-Boost 的组合,系统主要用于太阳电池阵电流较大[2]、单模块功率需求大的场合,功率器件和磁性器件使用较多,电路控制较复杂。图2为B3R 拓扑电路图。
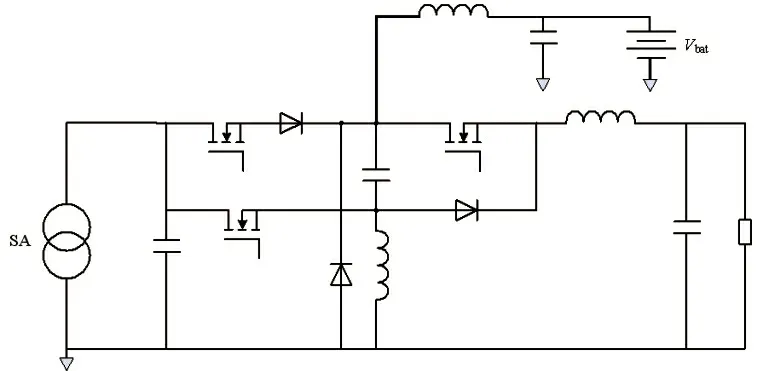
图2 B3R 拓扑
图3 为本文研究的升降压拓扑方案,适合每级方阵电流不大于6 A 的控制器中使用。
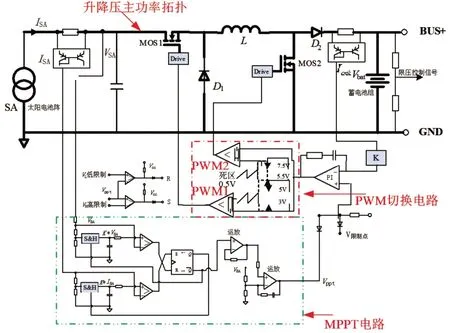
图3 MPPT升降压拓扑
升降压拓扑的实现使用两个MOS 管,两个二极管及一个电感,是一个H 桥电路。当电路工作于降压模式时,MOS1 工作于开关状态,MOS2 工作于完全开路态,电路为Buck 拓扑,实现降压功能;当电路工作于升压状态,MOS1 工作于完全导通态,MOS2 工作于开关状态,电路为Boost 拓扑,实现升压功能,通过MOS1 和MOS2 的工作状态变换,最终实现升降压功能。拓扑在控制中的关键是变换器升降压状态切换过程中需连续,不必增加直通电路和切换电路仍能实现各工作状态的平滑切换。
MPPT 升降压调节器具有如下优点:
(1)升降压拓扑形式简单,器件少,可靠性高;
(2)二极管D2的存在易实现多级电路的并联;
(3)硬件电路实现MPPT 功能;
(4)升降压状态切换过程动态连续。
1.2 升降压状态切换控制
升降压状态切换控制电路是保证拓扑在升降压工作状态的自动切换,不仅要实现状态的快速切换,而且需要保证连续可靠,如图3 所示框图PWM 切换电路。电路在实现的过程中设置降压电路的PWM1 和升压电路的PWM2 的锯齿波,在PWM1 与PWM2 之间的锯齿波设置死区电压,PI 调节器产生的误差信号会随太阳电池方阵输入电压与蓄电池电压的差值,产生3~7.5 V 误差信号,由控制PWM1 的降压,到等压的直通,再到控制PWM2 的升压连续控制过程,反之,控制方式相反。此种方式,较数字电路控制等其他方式升降压过程不连续,以及需要增加MOS 管实现输入与输出电压相同时的直通路控制具有明显优势。
1.3 MPPT 电路
太阳电池阵的最大功率跟踪控制方法较多,本方案采用电导增量法。电导增量法控制精确,响应速度比较快,适用于空间环境条件变化较快的场合[3-4]。MPPT 电路原理如图3所示,控制原理如图4 所示。
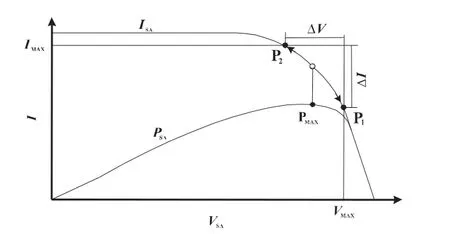
图4 MPPT控制原理示意图

由式(1)的意义可知,通过设计类似push-pull 电路,使得在P1点时电压逐渐下降,当下降 ||ΔV 后,功率点到达P2点,同时电压逐渐上升,电流逐渐下降,当下降 ||ΔI 后,到达P1点后再向P2点移动,反复循环,则当ΔV 足够小时,功率点在最大功率点很小的范围内波动,实现动态最大功率点的定位[5]。
2 MPPT 升降压调节器仿真与实验
为了证明方案的可行性,进行了仿真和实验验证。搭建了空间不调节母线控制拓扑,母线电压即蓄电池电压,电压可多档位控制,本项目采用50 V 母线电压,进行升降压调节器的验证。
MPPT 升降压调节器主要参数:
输出电压:(50±1)V;
输出功率:300 W;
输入电压(太阳电池阵最大功率点电压):30~70 V;
输入电流(太阳电池阵最大功率点电流):5 A;
MPPT 跟踪精度:≥98.5%;
升压效率:≥94.5%;
降压效率:≥95.5%。
图5 是调节器工作于降压模式的仿真,其中CH_A 为输入方阵电压65 V、CH_B 为输出母线电压50 V、CH_C 为MOS1 驱动波形及CH_D 为MOS2 驱动波形。
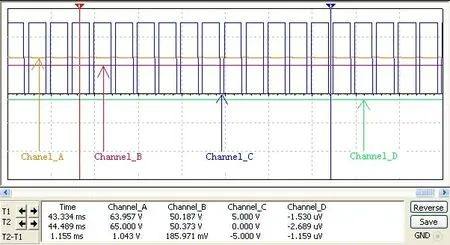
图5 工作于降压模式的仿真1
图6 是调节器工作于降压模式的仿真,其中CH_A 为输出母线电压、CH_B 为PWM1 锯齿波、CH_C 为误差信号及CH_D 为PWM2 锯齿波。
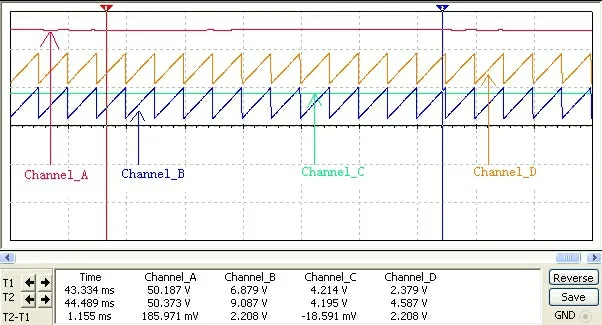
图6 工作于降压模式的仿真2
图7 是调节器工作于升压模式的仿真,其中CH_A 为输入方阵电压33 V、CH_B 为输出母线电压50 V、CH_C 为MOS1 驱动波形及CH_D 为MOS2 驱动波形。
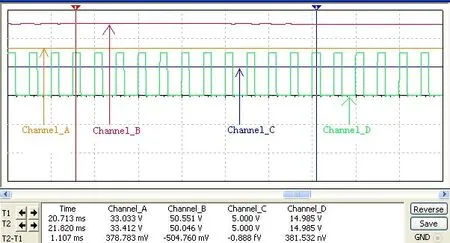
图7 工作于升压模式的仿真1
图8 是调节器工作于升压模式的仿真,其中CH_A 为输出母线电压、CH_B 为PWM1 锯齿波、CH_C 为误差信号及CH_D 为PWM2 锯齿波。
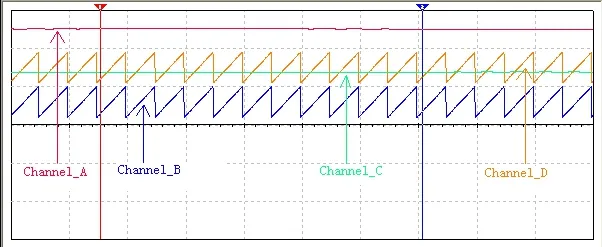
图8 工作于升压模式的仿真2
图9 是调节器工作于输入电压与输出电压相等模式的仿真,其中CH_A 为输入方阵电压、CH_B 为输出母线电压、CH_C 为MOS1 驱动波形及CH_D 为MOS2 驱动波形。
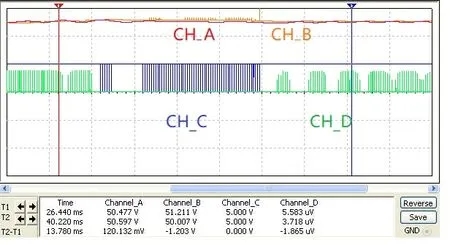
图9 工作于直通模式的仿真1
图10 是调节器工作于输入电压与输出电压相等模式的仿真,其中CH_A 为输出母线电压、CH_B 为PWM1 锯齿波、CH_C 为误差信号及CH_D 为PWM2 锯齿波。
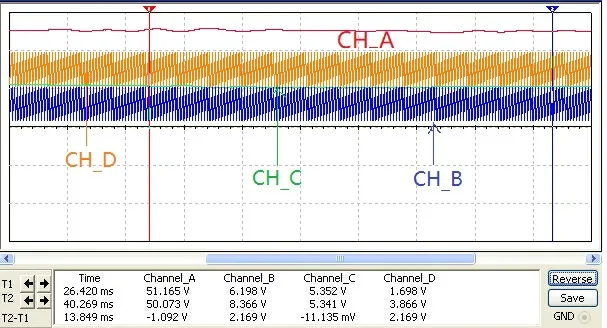
图10 工作于直通模式的仿真2
图11 是太阳电池阵工作于最大功率点时,方阵电压与电流仿真波形,图12 是H 桥升降压电路实际测试太阳电池方阵的最大功率点跟踪时波形,MPPT 跟踪精度达到98.5%。通过输入电压65 V(如图5)和输入电压33 V(如图7),输出电压50 V 工况下对调节器进行仿真和原理样机的测试,调节器在方阵电流5 A 时,升压效率达到94.5%,降压效率达到95.5%,参数满足输入要求,本文电路拓扑可以实现升降压调节及MPPT 控制。
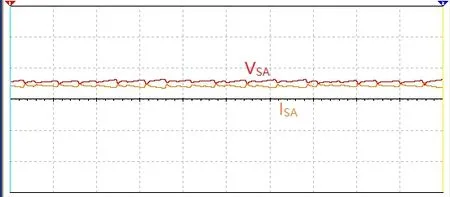
图11 MPPT仿真波形
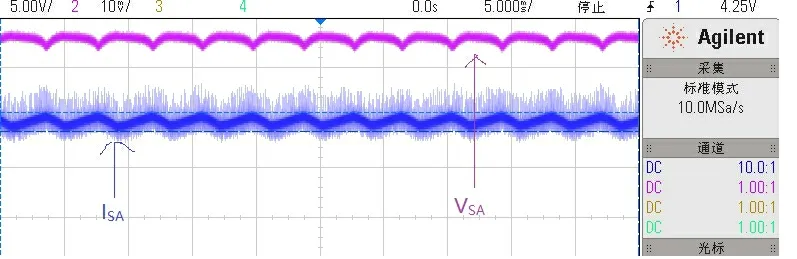
图12 太阳电池阵实际测试波形
3 结束语
通过对MPPT 升降压调节器进行电路仿真和原理样机的研制及测试,证明了方案的可行性,对空间电源飞行器在太阳电池阵和蓄电池组组合的电源系统具有指导意义。