基于RTK的农机机械智能辅助驾驶系统
2021-03-07孙煜黄启宏赵博何媛媛朱烨
孙煜 黄启宏 赵博 何媛媛 朱烨
(成都信息工程大学电子工程学院 四川省成都市 610213)
1 引言
国外在农业领域技术主要有:
(1)设计并且使用了基于卡尔曼滤波重构和非线性速度控制的控制算法对农机进行自动导航。
(2)结合机器视觉和立体视觉系统,设计并使用自动导航和避障的农用机器人。
可以说相当的成熟。
相较于国外,国内RTK技术在农机自动化领域的应用目前尚未全面建设和实行。在农机行业,中国的农机企业发展不太平衡,高端产品较少,核心零部件仍依赖于国外,而在智能化方面,还处于市场培育阶段。
目前有些企业的自动化农机在耕耘、栽培、收割和运输自动控制、自动排灌系统等用途上已有一些成效,虽然能满足大部分的农耕作业的基本需求,但是精细的农耕作业如插秧,在现有的自动导航技术条件下,导航的精度不足,因无法满足精细的定位导航条件而未实现普及。并且所需科技含量很高,成本比较昂贵,因此产业化程度较低,目前还没有实质性地投入到广大农机产业中。
本项目针对农机自动导航问题,基于RTK技术,结合多种技术,保证农机在无人驾驶的情况下能够实时获取农机的位置、速度、航向、姿态,当其偏离预定义路径时能及时转向减少误差,研发一套智能辅助驾驶系统,实现农机的自动化。
2 系统框图
如图1所展示,该系统是基于GPS/北斗-RTK卫星定位与惯性导航传感器融合的定位技术实现精准的自动导航功能,加载包括人工智能处理模块视觉传感器,多频点通信模块、智能识别算法、无线定位模块和多光谱仪等在内的部件。该农机在包括基于GPS/北斗-RTK卫星定位与惯性导航传感器融合的定位技术,基于的无人机垂直降落技术、多光谱仪检测选择合适卷积神经网络模型技术、多通信频点技术(70MHz-6G)、基于人工智能芯片内置的深度感应技术、基于视觉传感器的智能检测及图像分析处理技术等先进技术支撑下,从而实现农机完美的自动导航行驶于耕种,能够解放大量的人力,改善人员劳动力不足、效率低下的问题。实现耕种的自动化操作,确保农机在无人驾驶的情况下能够实时获取农机的位置、速度、航向、姿态等研发一套自动驾驶系统,保证了耕种的实时性、有效性、科学性和持久性。
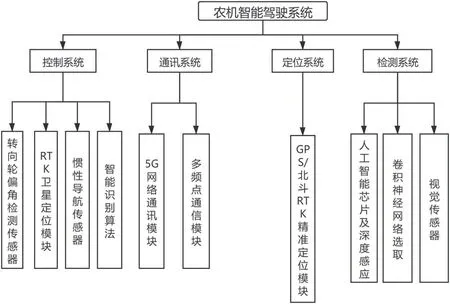
图1
2.1 控制系统
2.1.1 转向轮偏角检测传感器
农机转向轮偏角传感器,是用来检测方向盘的转动角度和转向方向的。方向盘的转动都会被转向角传感器检测到,从而使农机电控单元发出正确的转向指令。而方向盘的转动角度是为农机实现转向幅度提供依据。
2.1.2 RTK卫星定位模块
配合全国北斗增强网的高精度定位服务,可以达到实时厘米级定位精度的高精度定位模块,从而获得农机的实时厘米级坐标(经度、维度、高程)在本地端解算
2.1.3 惯性导航传感器
惯性导航传感器主要是用来检测和测量加速度、倾斜、冲击、振动、旋转和多自由度(DoF)运动,是解决农机导航、定向和运动载体控制的重要部件。
2.1.4 智能识别算法
通过智能识别算法,来控制农机的运动来达到避障的效果,并且减少农机因为RTK/北斗的定位技术带来的误差而达到的损失。
2.2 通讯系统
2.2.1 5G网络通信模块
5G网络通信模块通过无线网络与基站通信,基站作为桥梁,连接了单片机和核心网,所以它会把相关的信息做传输,上传到云端来进行数据处理
2.2.2 多频点通信模块
多频点通信模块,在农机上设计一款可配置的射频工作频点范围为70MHz到6GHz的多频点通信模块,通过农机自动驾驶控制器将自动提取的障碍物边界和自动配准的坐标数据实时传送到云端,从而实现数据分析处理,并将处理结果返回各个模块节点。
2.3 定位系统
GPS/北斗RTK精准定位模块:GPS/北斗RTK精准定位模块融合的厘米级定位,采用北斗-RTK系统与惯性导航传感器融合的定位技术,研发了多种技术融合的自动导航系统。可以有效解决农机的自动导航问题。
3 硬件部分
本系统的硬件部分如图2所示。单片机通过电源接口供电,将数据通过USB通信传给上位机,RTK模块用来实时定位,单片机通过4G模块与人机交互模块和信息反馈模块通信,与控制模块采用IIC通信,控制模块为了传输更快,采用SPI通信与信息反馈模块通信,然后将数据通过4G通信返回给单片机处理。
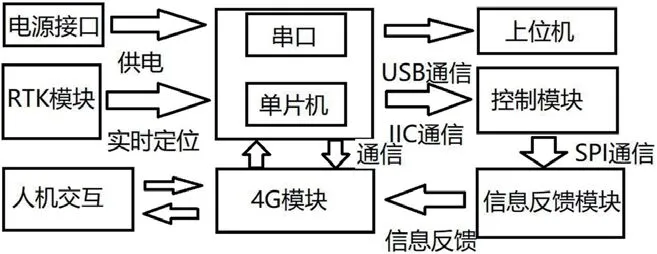
图2
4 实验测试
通过测试(如图3、图4、图5、图6)可以得出该系统运行良好可以基本达到预期的目标。

图3

图4

图5

图6
5 结论
本产品作为一种基于北斗定位和云计算的农机智能驾驶系统项目,有许多优点如下:
(1)北斗-RTK系统与惯性导航传感器融合的厘米级定位,针对农机自动导航问题,基于路径跟踪组合控制算法和分段地头转弯策略,研发了多种技术融合的自动导航系统。
(2)基于深度学习和云计算的农田障碍物检测技术通过多光谱仪采集数据,进行分析,以完成卷积神经网络模型的选取,以达到高精度,高速度的障碍物识别和检测。
(3)目前国内自动化农机在导航系统上以GPS技术为主,本项目实现了四川省第一套以RTK技术为基础,做到主流农机全覆盖的精细自动导航驾驶。
(4)改善人员劳动力不足、效率低下等问题着手,紧密围绕“提高农耕工作效率、减少人力损耗”的目的,研究设计一款能提高生产效率、减少人力损耗和实现精细的农耕操作的智能农机。
本产品带来的很多效益,也有许多意义:
(1)减少农田作业人力投入。
(2)提升农机作业精准度及智能化水平。
(3)推动国内精细农业发展。
(4)完成了四川第一套适配所有主流农机的辅助驾驶系统。
