二位置光纤陀螺寻北仪方案设计及验证
2021-03-07马晋美朱家海谢聂
马晋美 朱家海 谢聂
(空军工程大学航空工程学院 陕西省西安市 710038)
陀螺寻北仪具有精度高、不受环境因素影响的优势,其广泛应用于雷达、天线、军用车辆等装备的初始对准和方向控制中。传统的陀螺寻北仪大多采用双轴动力调谐陀螺作为角速度敏感元件,其结构复杂、寻北时间长、易磨损、寿命短。光纤陀螺是一种基于Sagnac效应的新型光学陀螺仪表,其相对于机械转子陀螺具有诸多优点。利用光纤陀螺制造的光纤陀螺寻北仪具有体积小、功率低、寻北时间短、寿命长等优点,受到广泛的重视和研究[1-2]。国外由于光纤陀螺技术成熟比较早,目前已经有了大量的光纤陀螺寻北仪产品。国内近几年光纤陀螺技术发展迅速,有部分单位也生产了光纤陀螺寻北仪。论文[3-4]设计了一种二位置旋转180°的光纤陀螺寻北仪,其优点是可以抵消光纤陀螺的零偏。但是在实际工程中发现,此方案存在无法判断北向夹角偏东或者偏西的问题。本文设计了一种结构简单、成本低、寻北时间短的二位置旋转90°光纤陀螺寻北方案,有效地解决了判断北向夹角偏东或者偏西的问题,并对方案进行了误差补偿和实验验证。
1 光纤陀螺寻北仪原理及方案设计
1.1 光纤陀螺寻北仪原理
光纤陀螺是一种惯性测量元件,其可以测量载体相对于惯性空间的角速度。地球绕着地轴以Ω的角速度相对于惯性空间旋转,所以可以通过测量地球上某一点相对于惯性空间的角速度,从而确定该点的北向。如图1所示:光纤陀螺寻北仪的原理是将一个光纤陀螺和两个加速度计安装在可以旋转的转台上,光纤陀螺的敏感轴平行于转台,通过转台的转动光纤陀螺可以测量地球上某一点沿多个方向上的自转角速度分量。两个加速度计可以测量出平台相对于水平面的夹角,通过光纤陀螺输出的多个方向上的角速度大小,以及两个加速度计的输出就可以解算出该点的北向。

图1:光纤陀螺寻北仪原理
1.2 平台转动方案的设计
光纤陀螺测量一个方向上的角速度大小是无法确定北向的,所以必须通过转台的转动测量多个方向上的角速度。转台转动方案可分为二位置、多位置、以及连续旋转方案[5]。二位置寻北方案结构简单,不需要精密的步进电动机,只需要一个卡环使转台转动到固定位置时停止转动,并且,二位置方案只需要在两个位置测量地球自转角速度,寻北时间短。多位置寻北方案精度较高,但是需要精密的步进电动机,使转台准确转动固定的角度,并且寻北时间长,成本高。连续旋转方案目前还处理论研究阶段,实现起来难度和成本都比较高。所以本文采用二位置寻北的方案,目前有大量关于二位置旋转180°的寻北方案研究,本文针对其不足设计二位置旋转90°的寻北方案。
1.2.1 二位置旋转180°方案的原理与不足
二位置旋转180°方案的原理是利用光纤陀螺分别在相隔180°的两个方向上测量地球自转角速度分量[6],如图2所示。
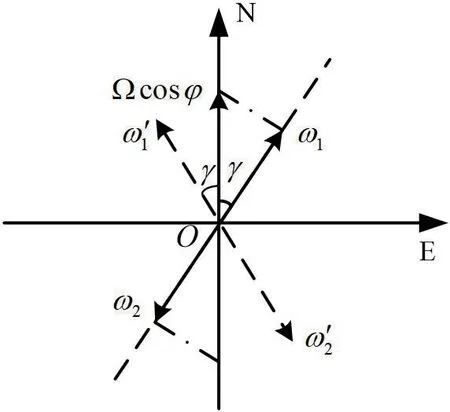
图2:二位置旋转180°方案原理图
由图中几何关系可知:

式中:ω1为光纤陀螺输出的角速度值,Ω为地球自转的角速度,其为常值15°/h,φ为寻北仪所处当地的纬度,γ为初始时刻光纤陀螺敏感轴与北向夹角,D为光纤陀螺的零偏,ε(t1)为t1时刻光纤陀螺的噪声。
同理,转台转动180°后所测的角速度为:

(1)式减去(2)式得:

将(3)式变形,并且忽略随机误差的影响得:

此方案的优势在于可以抵消光纤陀螺零偏的影响,缺点则在于只能计算出γ的大小,无法判断北向夹角γ的偏东或者偏西。如图2中实线和虚线表示的两次寻北结果,ω1和ω1'都为正,ω2和ω2'都为负,所以无法区分两者。
1.2.2 二位置旋转90°方案原理
二位置旋转90°的旋转方案,其原理和旋转180°方案相似,光纤陀螺在一个方向上测量地球自转角分量ω1,然后,转台只旋转90°被卡环卡住再一次测量地球自转角分量的值ω2,如图3所示,假设转台平行于当地水平面时,由图中几何关系可知:
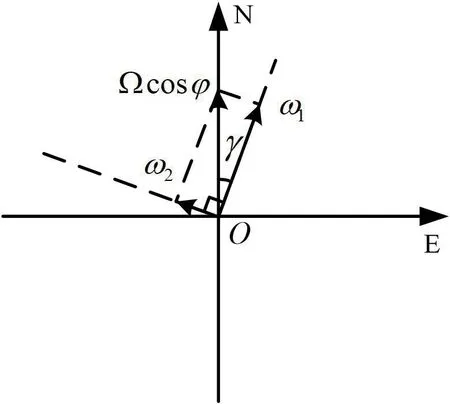
图3:二位置旋转90°方案原理

(5)式除以(6)式得:

上式中光纤陀螺的零偏D无法抵消,所以只能通过初始标定进行减小,ε(t1)和ε(t2)在ω1、ω2取均值时期望为零,忽略D和ε(t1)、ε(t2)的影响,则(7)式可以简化为:

已知光纤陀螺初始时刻的方位,即ω1的方位,计算得到γ就确定了北向方位。转台初始时刻的位置可以通过ω1和ω2的正负进行判断。判断方法如表1所示。
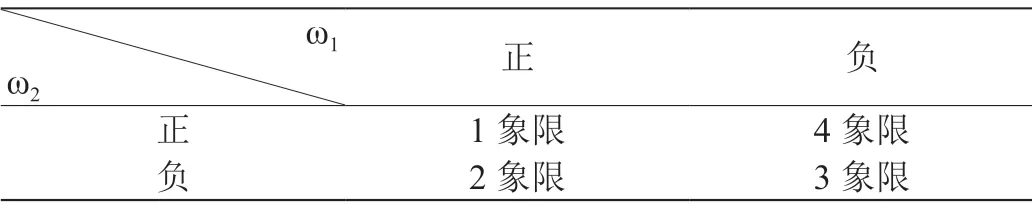
表1:转台初始位置判断方法
1.3 平台姿态误差补偿
上面研究的是转台平行于当地水平面时的解算方法,当转台倾斜时,需要对转台姿态角产生的误差进行补偿[7]。如图4所示,OENT坐标系为东北天地理坐标系,OXYZ坐标系为转台坐标系。由地理坐标系OENT绕OE轴逆时针转动α得到OEYZ',OEYZ'再绕OY轴逆时针旋转β得到OXYZ,则由OENT坐标系到OXYZ坐标系的方向余弦矩阵为[8]:
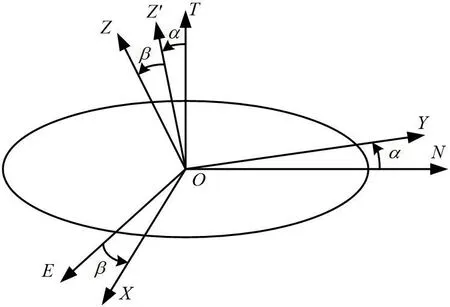
图4:平台姿态示意图

在地理坐标系中,地球自转角速度在东向分量为0,在北向分量为在天向分量为在倾斜的转台坐标系中,地球自转角速度在转台坐标系中三个轴向的分量为:
当转台平行于水平面时,光纤陀螺测量的角速度只有地球北向角速度的分量。在倾斜的转台平面上,光纤陀螺同时敏感地球自转角速度北向和天向的分量。由图5所示,光纤陀螺同样在相互垂直的两个方向上测量地球自转角速度分量得到ω1和ω2,由图中的几何关系可得:

图5:转台平面内角速度分量图

将ωX、ωY代入上式,得:

上式即为转台倾斜时,北向的解算方法,由上式可以看出:当转台倾斜时寻北仪所处的纬度值φ、倾斜角α和β将对寻北结果产生影响,所以寻北前需要确定当地的纬度。
2 方案验证实验
实验所用光纤陀螺为TS-28B型光纤陀螺,其零偏稳定性为0.02°/h,如图6所示。加速度计的精度为10-3g。光纤陀螺在相隔90°的两个方向上采样的时间为1min,采样周期为0.1s。对两次采样的数据分别取均值得到ω1和ω2,通过两个加速度计的输出计算出转台的倾斜角α和β,然后通过解算得到γ。其寻北流程如图7所示。

图6:TS-28B光纤陀螺
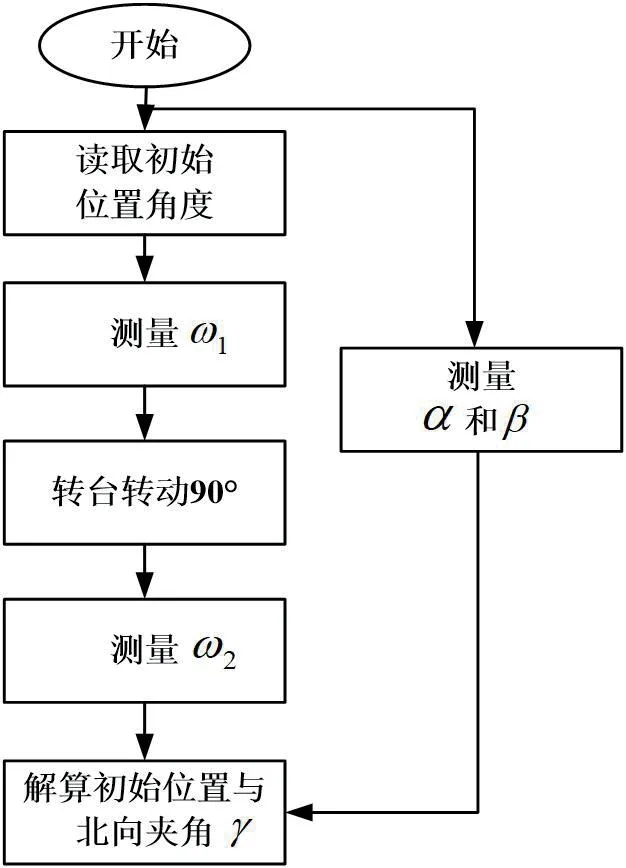
图7:光纤陀螺寻北仪工作流程
实验时,将光纤陀螺寻北仪固定在高精度转台上,转台可以给光纤陀螺寻北仪提供准确的倾角α和β,如图8所示,实验中α和β的取值范围为0~30°,实验当地纬度为34°16'。光纤陀螺寻北仪在不同倾角下的寻北精度如表2所示,由表中数据可以看出平台绕东西轴转动α对光纤陀螺寻北仪的精度影响较大,而绕南北轴转动β对光纤陀螺寻北仪精度影响较小。寻北时间主要包括初始时刻读取初始位置、测量ω1和ω2、解算时间,整个寻北时间约3分钟。
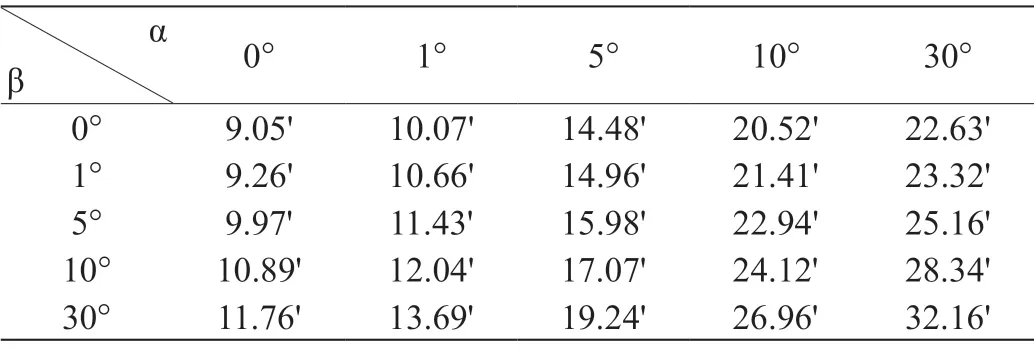
表2:光纤陀螺寻北仪不同倾角寻北误差

图8:光纤陀螺寻北仪寻北实验
3 总结
文章分析了光纤陀螺寻北仪的基本原理,对比了二位置、多位置和连续旋转方案的优缺点,针对二位置旋转180°方案无法确定γ偏东或者偏西的问题,设计了二位置旋转90°的寻北方案。推导出了光纤陀螺寻北仪在转台水平和转台倾斜情况下的寻北解算公式,通过实验测得了所设计光纤陀螺寻北仪在不同倾斜角下的寻北精度。从结果中可以看出:转台绕地理坐标东西轴转动对光纤陀螺寻北仪寻北精度影响较小,而绕地理坐标南北轴转动对寻北精度影响较大。通过对转台倾斜角误差的补偿,倾斜角在0~30°内变化时,寻北精度在32'以内。方案达到了预期的精度,该方案的优点是可以判断γ偏东或者偏西,并且不需要精密的步进电动机,成本低、结构简单。缺点是对于光纤陀螺的零偏D只做了标定处理进行减小,在计算中认为其是小量而进行了忽略,这样对于光纤陀螺的零偏稳定性要求较高。
