挖掘抽吸车回转平台有限元仿真分析
2021-03-07吴野韩松峰景藜王静
吴野 韩松峰 景藜 王静

摘 要:本文在对挖掘抽吸车的作业特点进行分析的基础上,选取臂架举升和臂架伸缩两个典型的作业工况对抽吸臂架回转平台进行受力分析,并在设计阶段搭建力学模型,并运用ANSYS Workbench对回转平台进行进行静力学分析,进而得到回转平台的应力云图和位移矢量图,从而发现回转平台在结构设计上的缺陷部位与富余环节,为结构设计进一步优化和轻量化设计提供了理论依据。
关键词:挖掘抽吸车;回转平台;ANSYS Workbnech;仿真分析
中图分类号:TU99;TH123 文献标识码:A
1引言
挖掘抽吸车主要应用于市政环卫和抢险救援领域,解决城市下水管道堵塞疏通以及城市内涝抢险的问题,同时可用于河道淤泥清理、狭窄地带垃圾清理、物料泄漏清理、无损开挖等场合。挖掘抽吸车主要由底盘、车架、臂架、动力系统、罐体总成、疏通系统、液压系统、电控系统等部分组成。其中,回转平台是挖掘抽吸车核心部件之一,其通过回转减速机固定在罐体上,通过液压马达来驱动实现臂架的回转运动。回转平台采用整体焊接式结构,由平台主体和旋转臂组成。本文重点研究某型挖掘抽吸车的回转平台,在典型 工况下对其进行受力分析,并在此基础上进行有限元静力学分析,在保证满足使用要求的前提下,为转台的结构设计进一步优化和轻量化设计提供了理论依据。
2典型工况受力分析
挖掘抽吸车在实际作业过程中,先将车辆行进至指定位置后,通过遥控操作臂架进行施工作业。此时,臂架回转平台根据要求进行旋转到指定位置后,进行管路连接,进行挖掘抽吸作业。回转平台的典型工况可总体上可划分为两种工作状态:
①在实际作业过程中,需要对臂架进行举升作业,扩大作业范围。根据实际工况要求进行角度调整。
②在实际作业过程中,需要对臂架进行伸缩作业,扩大作业范围。根据实际工况要求进行范围调整。
回转平台是挖掘抽吸车臂架装置主承载结构,臂架的设计参考起重机举升臂相关设计标准,加载时取安全系数1.5。
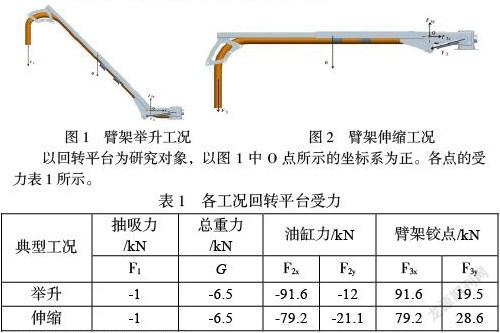
2.1 臂架举升工况
臂架举升时,为了得到转台处臂架安装点所承受的最大力,我们将臂架举升至最高点,对臂架整体进行受力分析。受力简图如图1所示。其中:抽吸力,臂架自重及软管重量及物料总重,在三维模型中可测得油缸载荷与竖直方向的夹角,臂架处于平衡状态。根据各力对O点处的力矩平衡公式,计算出油缸拉力,O点水平方向受力,O点竖直方向受力。
2.2 臂架伸缩工况
臂架伸缩时,以臂架水平状态下为研究对象,并对其进行受力分析,受力简图如图2所示。抽吸力,臂架自重及软管重量及物料总重,在三维模型中可测得载荷与竖直方向的夹角,臂架处于平衡状态。根据臂架受力平衡公式可得,O点水平方向受力,O点竖直方向受力。
3臂架有限元仿真分析
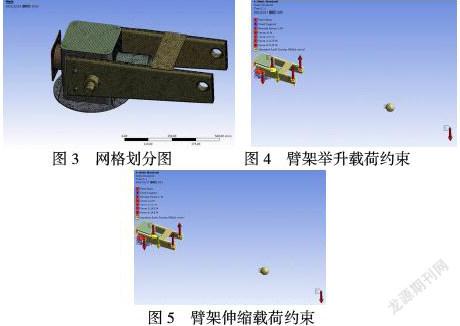
首先在Creo中对臂架回转平台三维模型进行简化处理,删除与仿真关联不大的部件,删除所有焊接处坡口和轴连接处安装导向倒角。将简化后的模型保存成.IGES通用格式后导入ANSYS Workbench中,对网格进行划分,然后按照表1中各工况下受力进行载荷的添加,最后求解,得到應力和应变云图,并进行分析。回转平台的网格划分及各工况载荷添加及约束分别见图3、图4和图5。
图6和图7分别是臂架举升和臂架伸缩时臂架回转平台的应力和应变云图。由仿真云图可知,臂架伸缩工况下回转平台应力和位移最大。最大应力集中在回转平台与举升臂连接销轴点,应力值为301MPa,目前设计阶段臂架回转平台材质选用Q460C,计算安全系数460/301=1.53,符合强度设计要求。从仿真云图可以看出,回转平台的应力集中发生在旋转臂架及连接处的销轴连接等部位,其余部分受力较小,可以在模型细化阶段对其结构形式进行优化和轻量化设计。从位移云图可知,臂架回转平台的形变集中在旋转臂端部,最大的位移形变量为0.65mm,位移量很小,符合设计需求。
4 结语
本文在对挖掘抽吸车的作业特点进行分析的基础上,选取臂架举升和臂架伸缩两个典型的作业工况对抽吸臂架回转平台进行仿真分析,得到回转平台应力分布和整体形变情况。回转平台的应力集中发生在旋转臂架及连接处的销轴连接等部位,其余部分受力较小,有较大的设计富余量,为结构设计进一步优化和轻量化设计提供了理论依据。
参考文献
[1]于占波.海山机械:非破坏性挖掘技术探路者[J].商用汽车.2016(11) :64-65.
[2]王艳,陈以田,徐信芯等.旋挖钻机回转平台主体结构分析及优化[J].建筑机械.2013.(2) :79-82.
[3]贺雷,王淑婧,倪坤等.双轮铣转台有限元静力分析[J].建筑机械.2021(2):62-64.
3575500589214
