长航时无人作战飞机的气动特性数值模拟
2021-03-05岳奎志孙义成程亮亮郁大照
岳奎志,孙义成,程亮亮,郁大照
(1.海军航空大学,山东 烟台 264001;2.清华大学航天航空学院,北京 100191)
长航时无人作战飞机是一种航时长、航程远的无人作战飞行器,该飞行器自身携带光学摄像机、红外侦测设备、卫星导航设备和合成孔径雷达,同时,也能挂载飞航导弹,用于执行巡逻、侦察和打击任务。目前,长航时无人作战飞机在各国正在如火如荼地研发、生产和使用,并且不断更新升级。美国的“捕食者”无人作战飞机的最大飞行半径为3 700 km,最大飞行速度为240 km/h,最大续航时间为60 h。“全球鹰”高空远程无人机的最大飞行速度为740 km/h,巡航速度为635 km/h,航程为26 000 km,续航时间为42 h。我国也研究长航时无人作战飞机,公开报道的型号有“翼龙”等,从公开的飞行性能数据中分析,我国的“翼龙”与美国同类型的“捕食者”存在一定差距,有待于从飞机总体设计与气动性能等方面加以研究,并不断完善提高无人机的性能,最终超越国外同类型无人机。
关于长航时无人机的气动特性的研究,国内外专家学者已经取得了非常丰富的学术成果。文献[1]集成动网格、边界条件、前处理、流场解算、计算功率因子和后处理模块,并通过Wing Optimal优化器模块将以上模块集成到一起,研究长航时飞机机翼翼型的优化;文献[2]基于Parsec参数化方法和Hicks-Henne函数,研究长航时无人机在低雷诺数时的翼型;文献[3]设计了长航时飞翼无人机,利用CFD理论获得其基本气动参数,并进行飞行试验验证。文献[4]针对中空长航时无人机,设计了高升力、低力矩的层流翼型;文献[5]设计了翼身融合布局中央机体翼型,并得出以下结论:采用具有前缘加载特征的“鹰勾”隐身前缘设计,气动性能损失小;文献[6]基于CFD技术,研究无人机的堵锥整流模型和动力影响模型,并分析两种模型的升阻特性;文献[7]应用CCFD软件,进行万核级并行流场数值模拟,分析飞机高速巡航构型阻力和低速增升装置的气动特性;文献[8]为了提高CFD模型对高空滑移流区域流动的模拟精度,用速度滑移与温度跳跃边界条件代替无滑移边界条件;文献[9]基于CFD理论,研究新型军用运输机的气动特性;文献[10]基于CFD理论,使用非结构网格,研究民用飞机的机身和机翼的气动特性;文献[11]基于CFD理论,以F-16战斗机为背景,通过数值模拟系统辨识测定飞机的稳定性和控制性;文献[12]基于CFD理论,以F-16和F-22A为背景,数值模拟飞机的升力系数、阻力系数和俯仰力矩系数。文献[13]基于CFD理论,研究了挂载导弹发射时其尾流对无人机的影响;文献[14]利用数值模拟方法,研究了机载导弹发射的过程;文献[15]研究了长航时无人机的翼尖小翼的气动特性;文献[16]研究了一种小型低雷诺数无人机的气动特性;文献[17]基于商业软件VSAERO计算了无人机全机的气动特性。虽然关于长航时无人机机体的气动特性研究比较丰富,但是关于无人机的挂载导弹的气动特性影响研究还未收集到相关文献。
本文采用CFD技术,针对挂载飞航导弹的长航时无人作战飞机进行气动特性分析,期望对无人机的总体与气动特性的研究提供理论依据与技术支持。
1 理论依据
在无人机进行CFD数值模拟过程中,空气流场的湍流模型采用标准的k-ε方程,流体力学控制理论则采用三维N-S方程。
湍流模型的标准k-ε方程为[18]:
Gk+Gb-ρε-YM+Sk
(1)

(2)
控制理论的三维N-S方程为[19]:

(3)

(4)

(5)
其中,ρ是流体密度,k是湍动能,t是时间,ui是时均速度,μ是流体动力黏度,μt是湍动黏度,σk是与湍动能k对应的Prandtl数,Gk是由平均速度梯度引起的湍动能k的产生项,Gb是由浮力引起的湍动能k的产生项,ε是湍动耗散率,YM是湍流中脉动扩张的贡献,Sk是用户定义的源项,σε是与耗散率ε对应的Prandtl数,C1ε、C2ε和C3ε是经验常数,Sε是用户定义的源项,u是速度矢量,u、v和w是速度矢量u在x、y和z方向上的分量,p是流体微元体上的压力,div()是散度,grad()是梯度,Su是动量守恒方程u方向的广义源项,Sv是动量守恒方程v方向的广义源项,Sw是动量守恒方程w方向的广义源项。
2 数值模拟
无人作战飞机气动特性数值模拟,包含3个部分:飞机几何模型建立与网格生成,空机气动特性分析,挂载导弹的无人机气动特性分析。
2.1 飞机几何模型建立与网格生成
在飞机概念设计中,本文参考国外先进的长航时无人机MQ-1“捕食者”无人机、RQ-4A“全球鹰”无人机和MQ-9“收割者”无人机的优点,采用CATIA软件,设计出长航时无人作战飞机的3D几何模型。长航时无人作战飞机采用大展弦比的机翼、V形尾翼、涡轮增压发动机、机身尾部带螺旋桨的无人机,飞机机翼下可以挂载两枚飞航式导弹。长航时无人作战飞机的几何模型见图1,其基本尺寸见表1。

图1 长航时无人作战飞机几何模型

表1 长航时无人作战飞机的基本尺寸
在建立无人机的几何模型之后,就要对飞机划分网格,然后,才能进行CFD分析。本文对长航时无人作战飞机进行网格化分,基于 Workbench软件Mesh模块,采用非结构的四面体网格,对无人机飞行的气动流场进行划分网格,生成空机的流场网格数量为12 976 283个,生成挂载导弹的无人机的流场网格数量为13 556 103个。取流场网格在无人机表面的网格部分,生成无人作战飞机的网格,见图2。
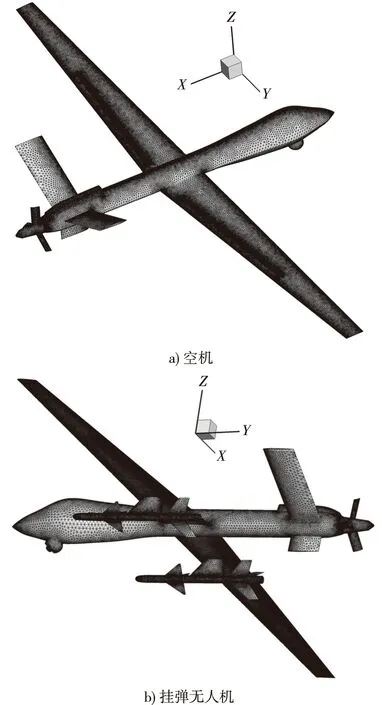
图2 无人作战飞机网格
在生成流场网格后,下面进行无人作战飞机的气动特性分析。
2.2 空机气动特性分析
本节采用Workbench软件的Fluent模块,基于CFD理论,分析长航时无人作战飞机在空机时的气动特性。
因为长航时无人机在中高空经常进行侦查、巡航飞行,所以,本文分析飞机在3 000 km空中飞行时的气动特性。在CFD分析求解无人机气动特性过程中,在模型设置选项中,湍流理论采用标准的k-ε方程,而流体力学控制理论采用三维N-S方程。飞机流场的初始条件设置如下:1)流场入口流体为空气,在海拔3 000 km空中的大气密度为0.909 25 kg/m3,压力为70 121 Pa,声速为328.58 m/s,动力黏度为1.693 8 N·s/m2;2)大气流场入口速度为80 m/s=0.243 472Ma;3)大气流场出口为自由出流;4)机翼参考面积为12.215 m2;5)重心位置设为x=4.046 m,y=0 m,z=0.115 m。
经Fluent软件的数值模拟,飞机在迎角为0°时,可以得出:1)无人作战飞机的压力系数云图,见图3;2)无人作战飞机的动压、静压云图,见图4;3)无人作战飞机的速度等值面图,见图5。
经Fluent软件的数值模拟,飞机在迎角为-6°~15°时,还可以得出:无人作战飞机的气动力系数和气动力矩系数,见表2。
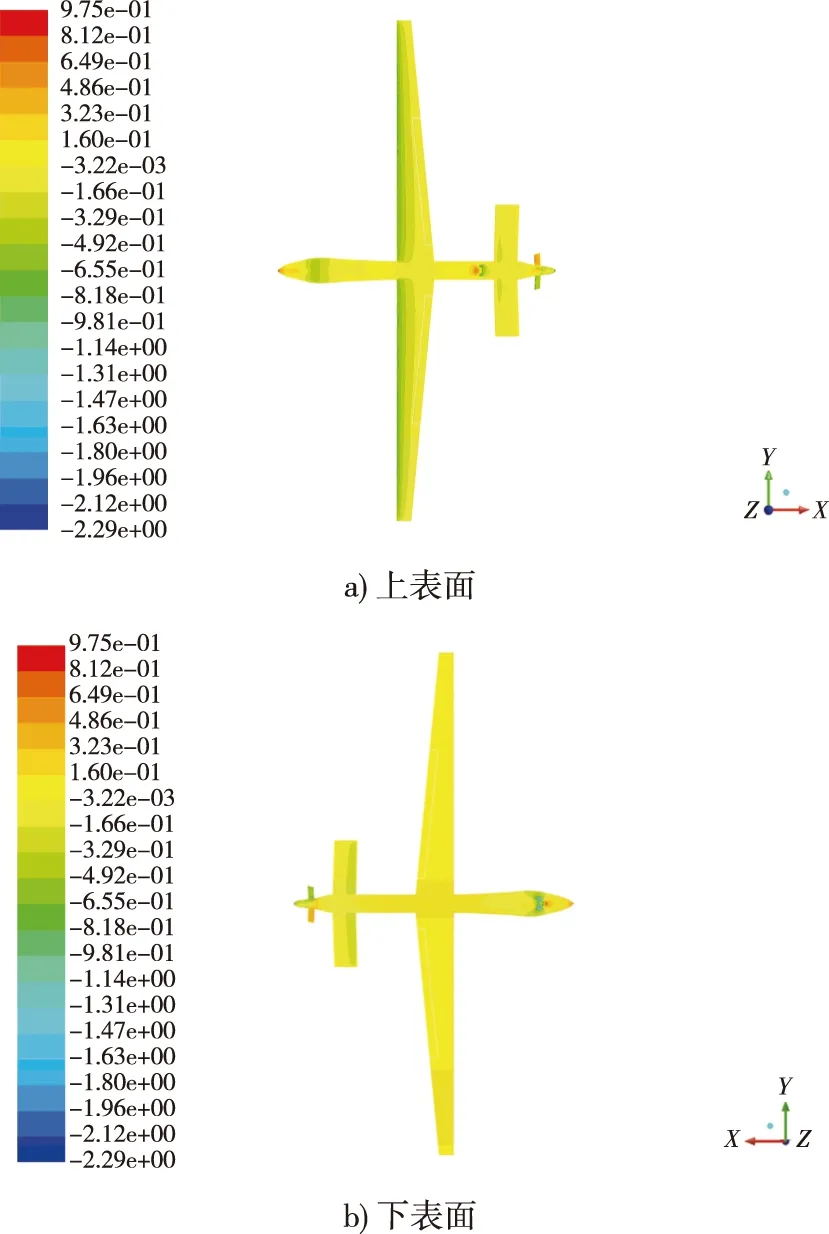
图3 无人作战飞机的压力系数云图

图4 无人作战飞机的压力云图
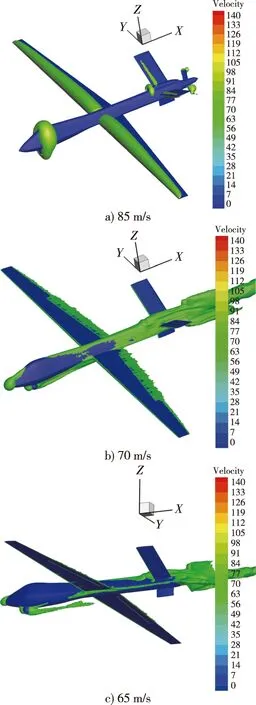
图5 无人作战飞机的速度等值面图
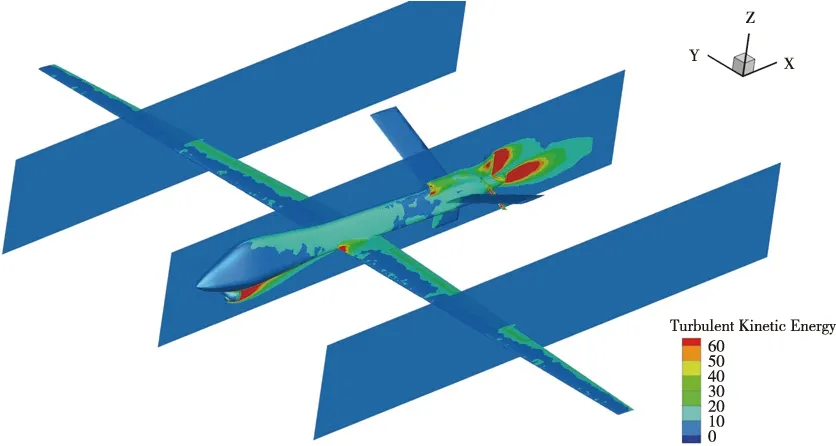
图6 无人作战飞机的湍动能剖面图
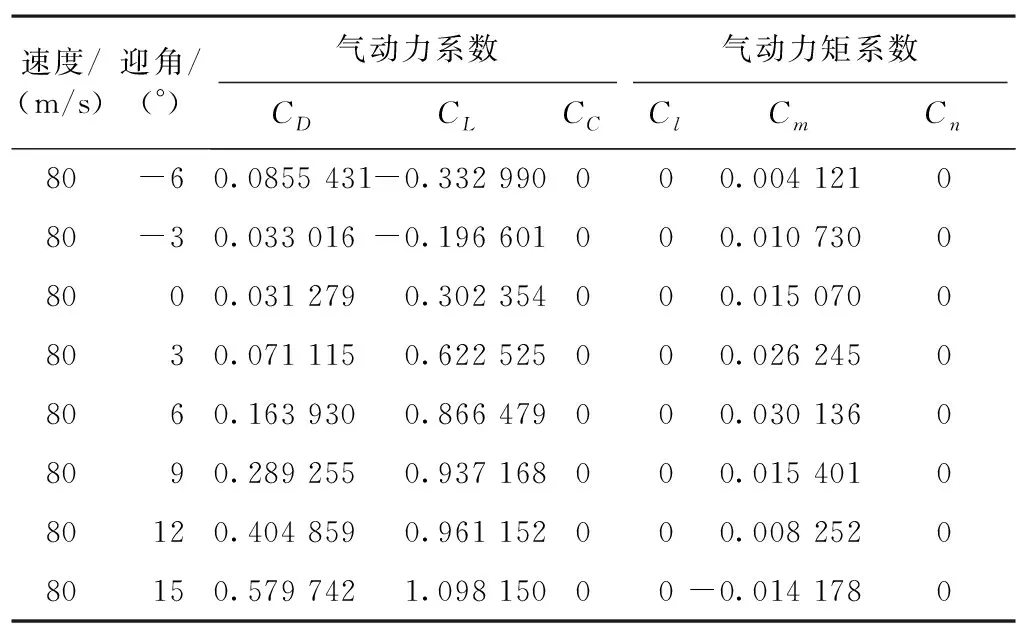
表2 无人作战飞机的气动力系数及力矩系数
无人机气流的转捩点就是气流的平流层向湍流层的过度点。从图6中,可以看出:1)机身前段均匀的气流属于层流,机身中段气流属于低强度的湍流;2)机翼下表面的气流属于层流,机翼上表面的前段气流属于层流,机翼上表面的后段气流属于湍流,襟副翼上下表面的气流属于低强度的湍流,机翼与机身连接处的气流属于中等强度的湍流;3)机头前段下方的摄像头前部气流属于层流,而后部气流为高等强度的湍流;4)螺旋桨后方的气流属于高强度的湍流。
螺旋桨后方湍流不可避免,可以减小的湍流范围为摄像头后方的气流。实施方案为:高速飞行时摄像头收于机身内,实施侦察时摄像头再伸出。
无人作战飞机在3 km高空,迎角为3°条件下,以80 m/s=0.243 472Ma速度平飞时,其所受的气动阻力D和升力L如下:
0.071 115=2 527.48 N,
0.622 525=22 125.01 N。
在对飞机进行初步性能评估时,飞机在稳定平飞条件下,升力、阻力、重力、推力之间的关系如下:
所以,长航时无人作战飞机在3 km空中平飞时的需用推力为

长航时无人作战飞机在3 km空中平飞时,可承载的飞机质量为
对于长航时的无人机,湍流转捩对发动机需用功率影响的逻辑关系如下:
长航时无人作战飞机在3 km空中,以80 m/s的速度平飞时发动机需用功率P如下:
由此可知,长航时无人作战飞机在3 km空中以80 m/s的速度平飞时,其总质量能够达到2 280.22 kg,约2.28 t,同时,无人作战飞机的需用推力约为2 537 N。无人作战飞机平飞时发动机的需用功率为202.20 kW。
2.3 挂载导弹的无人机气动特性分析
同理,本节采用Workbench软件的Fluent模块,基于CFD理论,分析长航时无人作战飞机在挂载飞航导弹时的气动特性。
飞机流场的初始条件设置基本不变,改变的只有如下设置:重心位置设定为x=3.597 m,y=0 m,z=0.041 m。
经Fluent软件的数值模拟,飞机在迎角为3°时,可以得出:1)挂弹的无人作战飞机的压力系数云图,见图7;2)挂弹的无人作战飞机的动压云图,见图8;3)挂弹的无人作战飞机的静压云图,见图9;4)挂弹的无人作战飞机的总压云图,见图10;5)挂弹的无人作战飞机的速度等值面图,见图11。
经Fluent软件的数值模拟,飞机在迎角为-6°~15°时,可以得出:挂弹的无人作战飞机的气动力系数和气动力矩系数,见表3。
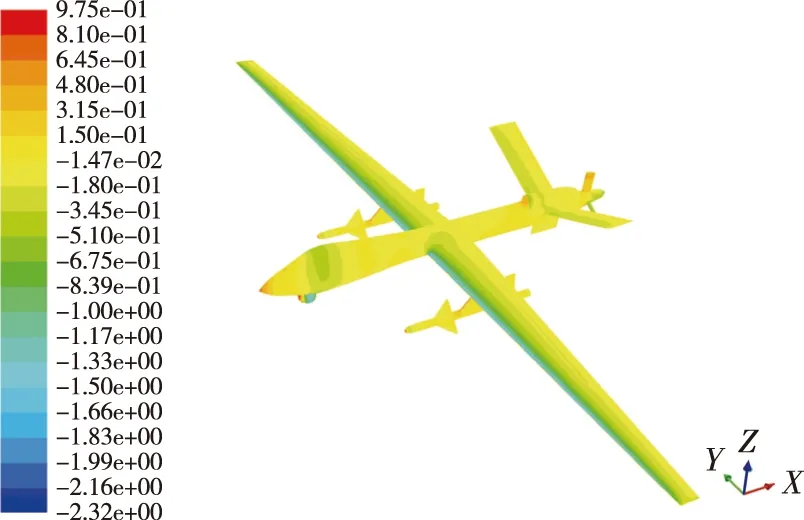
图7 挂弹的无人作战飞机的压力系数云图
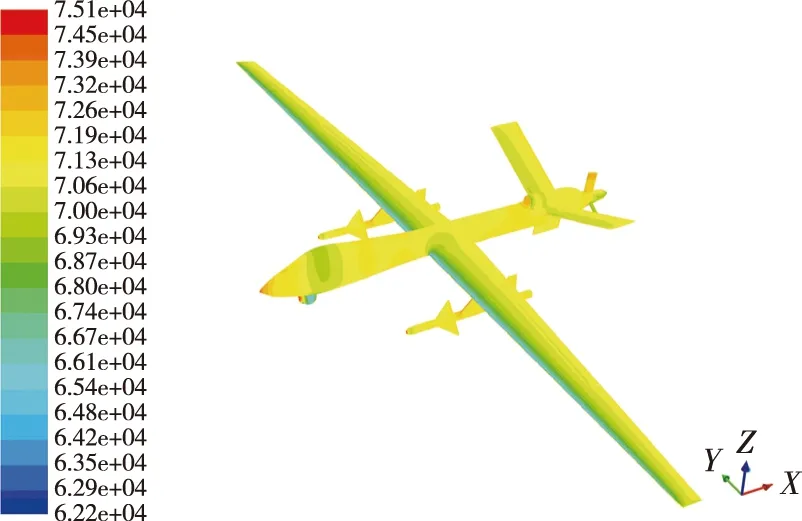
图8 挂弹的无人作战飞机的动压云图

图9 挂弹的无人作战飞机的静压云图

图10 挂弹的无人作战飞机的总压云图

图11 挂弹的无人作战飞机的速度等值面图
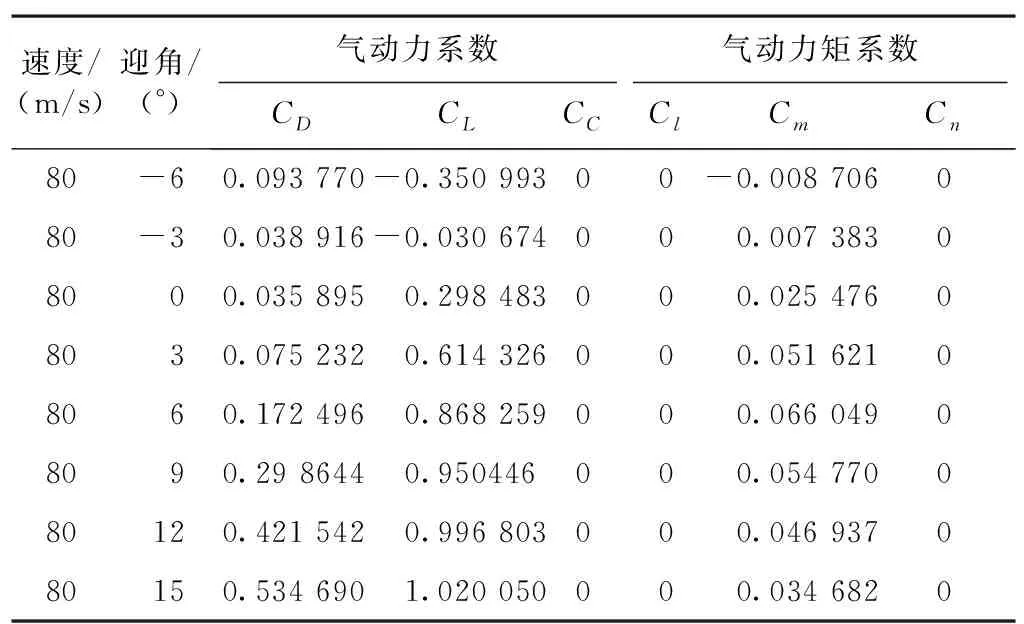
表3 挂载导弹的无人作战飞机的气动力系数及力矩系数
由表2和表3可知,在空气来流速度为80 m/s,飞机迎角为3°时,长航时无人作战飞机的气动特性如下:1)空机的升力系数为0.622 525,挂弹的无人作战飞机的升力系数为0.614 326,挂弹的无人作战飞机比空机的升力系数减小了1.317%;2)空机的阻力系数为0.071 115,挂弹的无人作战飞机的阻力系数为0.075 232,挂弹的无人作战飞机比空机的阻力系数增加了5.789%;3)空机的升阻比为8.754,挂弹的无人作战飞机升阻比为8.166,挂弹的无人作战飞机比空机的升阻比缩减了6.717%。同理,可以知道在空气来流速度为80 m/s时,在飞机迎角为-6°、-3°、0°、6°、9°、12和15°时,长航时无人作战飞机的气动特性。
下面将本文概念设计的长航时无人作战飞机与MQ-1“捕食者”无人机进行对比分析。MQ-1“捕食者”无人机,机长8.22 m,翼展14.8 m,机高2.1 m,机翼面积11.5 m2,空重512 kg,最大起飞重量1 020 kg。在飞机尺寸基本相同的条件下,概念设计的无人作战飞机比MQ-1“捕食者”无人机最大起飞重量提高了123.529%。
采用CFD技术进行估算无人作战飞机及其流场的压强、速率及升阻特性的准确性和可靠性,并通过大量的实验验证,证明方法的可靠性及准确性均满足无人作战飞机概念设计时估算飞机气动性能的要求。
3 结束语
本文基于CFD技术,对长航时无人作战飞机进行气动特性数值模拟。在CFD数值模拟过程中,无人作战飞机的空气流场的湍流模型采用标准的k-ε方程,流体力学控制理论则采用三维N-S方程。经CFD数值模拟,得出如下结论:
1)基于CATIA软件对飞机进行三维曲面建模,然后,使用Workbench 软件的Fluent模块对3D模型进行气动特性分析,该计算流程可行性强;
2)长航时无人作战飞机在3 km空中以80 m/s的速度平飞时,在迎角为3°的条件下,其总质量能够达到2 280 kg。在飞机尺寸基本相同的条件下,MQ-1“捕食者”无人机的载重为1 020 kg,概念设计的无人作战飞机比MQ-1“捕食者”无人机载重提高了123.529%;同时,无人作战飞机的需用推力约为2 537 N;
3)在迎角为3°条件下,挂弹的无人作战飞机比空机的升力系数减小了1.317%,阻力系数增加了5.789%,升阻比缩减了6.717%。
长航时无人作战飞机的气动特性分析,可为飞机总体设计与气动特性分析提供理论依据与技术支持。