一种港口码头在线测温系统方案
2021-03-04李海波韩喜俊
李海波 韩喜俊
1 中交机电工程局有限公司 2 北京凯盛建材工程有限公司
1 引言
近些年,粮食码头、油码头等危险品码头的新建或搬迁业务越来越多,而此类码头对防尘防爆要求尤为严格,因此对设备现代化、专业化的集中管理要求越来越高,对设备状态的可靠性、安全性、实时性、连续性等特性有了更高的需求,皮带机输送系统对温度检测预警的要求亦是如此。
传统的码头测温系统测量范围主要以电缆、电机轴承及绕组、减速机为主。电缆测温往往采用热电偶、测温光纤等测温材料,测量信号传送至采集装置,由采集装置上传至上位机系统,实现对整个场区的高压电缆温度监控预警;电机轴承及绕组、减速机测温一般在生产过程中已将测温元器件安装在设备内部,外部预留接线接口,通常由码头控制系统采集该部分信号并转化为数据实现中控的监控报警。由此可见,电缆测温与电机、减速机的测温监控预警不在同一系统中,且测量对象单一、覆盖范围小,使中控管理人员无法高效、统一地管理,更无法满足危险品码头皮带机输送系统的严格要求。本文介绍在山东某粮食码头进仓系统项目使用的一种在线测温系统。
2 工程概况
山东一粮食码头进仓系统项目是将物料从码头卸料漏斗经气垫式皮带机传送至转运站转运,最终抵达仓储粮仓,主要设备包含:10条全气垫式皮带机,双流程输送长度超过2 000 m;2条托辊式皮带机,双流程输送长度超过600 m;14台驱动电机、14台减速器、沿线所有滚筒及托辊。
3 方案设计
针对现场测量范围大、测量对象繁多复杂、测量设备分散等特点,提出采用由分布式测温系统与点式测温系统构成的在线测温系统。分布式测温系统主要适用于需要连续测温、测温精度高的气垫式皮带机沿线及托辊式皮带机沿线(含所有托辊),此系统测量范围广、测量连续效果好、抗电磁干扰能力强,不带电测量能够有效地实现防爆防燃。点式测温系统主要针对驱动电机、减速机、滚筒等,测量精确,测量分布不受限制,可实时监控。通过上述2种测量方式结合,覆盖了全场所有要求测量的设备、元器件及区间。在线测温系统的网络拓扑图见图1。

图1 网络拓扑图
3.1 分布式测温
3.1.1 工作原理
分布式光纤测温系统利用先进的OTDR技术进行定位,利用拉曼散射效应进行测温[1]。
首先分布式测温仪将固定能量、宽度的激光脉冲注入到专用的测温光纤中;其次激光脉冲在不断向前传输的同时,向后产生拉曼散射光波,而此拉曼散射光波的强度恰与所在光纤散射点的温度存在关系,反射点的温度越高,反射光的强度就会越大。利用此特性,系统可以通过测得反射点的散射光波强度进而计算出相应测量位置的温度。
3.1.2 温度计算
当光在介质中通过时,介质分子与入射光量子互相作用而引起频率变化的散射,此种现象就是拉曼散射。当光纤物质分子与入射光量子产生碰撞时,就会产生弹性碰撞和非弹性碰撞。当发生弹性碰撞时介质分子与光量子之间不会发生任何能量交换,光量子的频率也不会发生任何变化,产生与入射光频率V0相同的较强的瑞利散射光。当发生非弹性碰撞时,介质分子吸收频率为V0的光量子,发射出频率为(V0-Vmol)的光量子,与此同时介质分子从低能态跃迁为高能态,表现为频率为(V0-Vmol)、波长为λs的斯托克斯光;分子吸收频率为V0的光子,发射出频率为(V0+Vmol)的光量子,同时分子从高能态跃迁为低能态,表现为频率为(V0+Vmol)、波长为λa的反斯托克斯光。
反斯托克斯光幅度与温度有着紧密关系,因此系统可将斯托克斯光通道作为参考通道,斯托克斯光强为Is,将反斯托克斯光通道作为信号通道,反斯托克斯光强为Ia,两者的比值R(r)可以消除光纤弯曲、光源信号波动等非温度因素。计算公式如下:
R(r)=Ia/Is=(λs/λa)4exp(-hcV0/kT)
(1)
式中,Ia为反斯托克斯光强;Is为斯托克斯光强;h为普朗克常数;c为真空中的光速;k为波尔兹曼常数;T为绝对温度。
由上式可见,在外界条件一定的情况下,R(r)的变化仅与T有关,可以通过分布式测温系统调解出R(r)从而反推出对应点的T,由此实现对温度信息的采集。

图2 分布式测温系统构成
测温系统主机通常由显示器、工控机、数据采集卡、电信号放大器、光电探测器、光纤分波器、光纤分路器、脉冲激光光源等构成(见图2)。主机利用半导体激光器产生固定的窄脉宽光脉冲信号进入光纤,产生的散射光波被主机探测器接收后,经过光电信号转换并放大、数模信号转换、信号处理等,可将测量点的测量温度实时调节出来。
3.1.3 位置计算
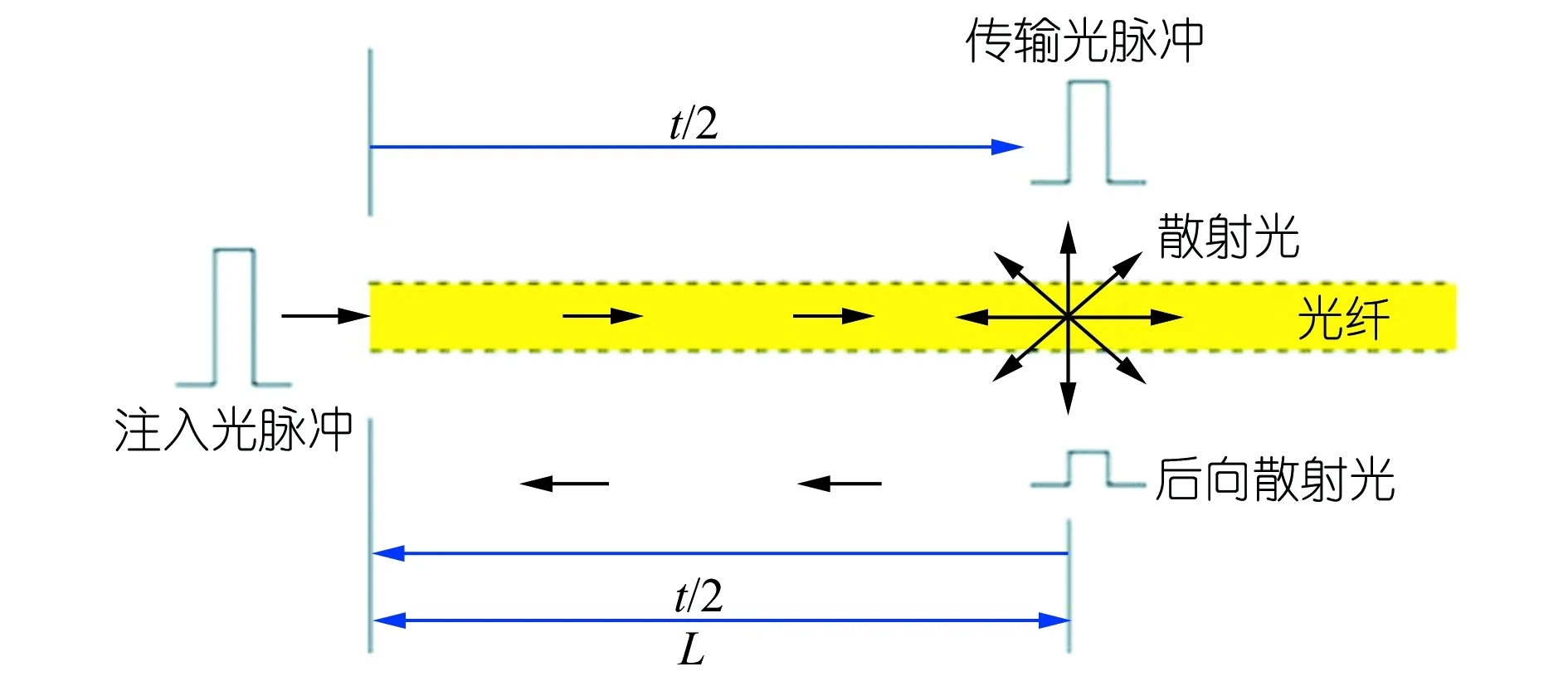
图3 位置计算工作原理
通过光时域反射(OTDR)原理,系统可实现对测量点分布的精准定位(见图3)。假设注入的激光脉冲在传输过程中,产生的散射光波返回到发射端所需要的时间为t0,所传输路程为2L0,光的实际传输速度为V0,光的真空传输速度为C0,光纤折射率为n0,由此可以计算出测量点位置,公式为:
V0=C0/n0
(2)
L0=V0t0/2
(3)
3.1.4 分布式测温系统构成
分布式测温系统集光纤通讯、光纤传感、信号解调、报警控制等功能于一体,系统集成化程度高,测量速度快,测量精度高。系统主要由测温光纤(光纤本身不仅进行信号传输,还用于探测温度,即传播传感一体化[2])、分布式测温仪、固定夹具、安装附件等构成。根据整个粮食码头的工艺流程及设备分布,分布式测温设计示意图见图4(波浪线为分布式测温光纤),分布式测温范围覆盖整个场区的气垫式皮带机及托辊式皮带机。气垫式皮带机在运行过程中,如果由于设备的故障、物料的偏载或堵塞等问题导致胶带跑偏,但仍未触发跑偏保护开关停机,将造成胶带与气室边缘摩擦,严重的会引发火灾或者爆炸。为避免这种险情出现,就必须在胶带跑偏与气室摩擦时立刻作出响应,从而由中控系统智能停机或者人工停机检查。根据上述情况,在10条气垫式皮带机气室边缘沿线布置测温光纤,通过分布式测温仪的精准计算,根据上位机的温度实时监控整条沿线运行状态,从而保证了物料运输的正常生产。
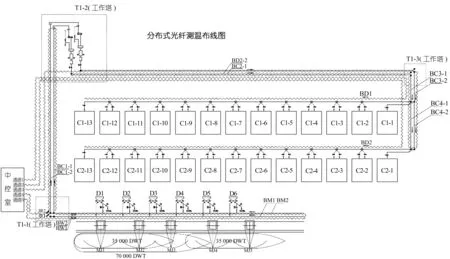
图4 分布式测温系统分布图
3.2 点式测温
点式测温主要针对分散布置全场的驱动电机、减速机、滚筒、张紧小车等设备进行精确测量,测量精度高,可实时监控。驱动电机、减速机主要由预装内部的温度传感器PT100进行测量,并通过通讯电缆将测温电信号传输至就近的控制采集器内,由光电转换器转换为光信号传输至中控室上位机处理。滚筒、张紧小车主要由测温单元对其两端轴承进行测温,并将测温信号传输至就近的控制采集器,再回传至中控上位机处理。其布置原理图见图5。

图5 点式测温布置原理图
4 结语
自系统正式投入使用以来,分布式测温能够有效地对气室、托辊等设备进行连续性、实时性的检测,点式测温作为传统的、高效的测温技术,保障了驱动装置、减速机等传动装置的温度检测。2种测温方式的结合将全范围覆盖整个粮食码头的温度监测,降低了设备停机次数、故障率、损坏率,实现预防为主、安全第一的生产理念,进而提高了生产效率,为日后温度测控的自动化发展积累了丰富的经验。
