基于GeoGebra对一种弹簧摆问题的可视化研究
2021-03-04陈林桑芝芳
陈林 桑芝芳
(苏州大学物理科学与技术学院 江苏 苏州 215000)
1 试题及解析
如图1所示,一轻质弹簧固定于C点,另一端固定一小球,将小球从与悬点C在同一水平面且弹簧保持原长的A点无初速度释放,让其自由摆下,不计空气阻力,在小球摆向最低点P的过程中,下列说法中正确的是( )
A.小球的重力势能减少
B.小球的机械能减少
C.小球的重力势能与弹簧的弹性势能之和不变
D.小球与弹簧组成的系统机械能减少

图1 试题情境图
解析:小球从A运动到P的过程中,以小球为研究对象,重力做正功,重力势能减小,选项A正确;但是由于弹簧弹力做负功,将小球的一部分机械能转化为弹簧的弹性势能,所以小球的机械能减少,选项B正确;此过程重力势能减少,转化为弹簧的弹性势能和小球的动能,所以小球的重力势能与弹簧的弹性势能之和减小,选项C错误;只有重力和弹簧弹力做功,所以系统机械能守恒,选项D错误.本题答案为选项A,B.
以上分析是定性分析,纵使能把答案选出来,学生依然会有许多疑问:
(1)小球接下来的运动轨迹是怎么样的?
(2)悬点正下方P点,小球速度的方向是水平吗?
(3)小球的合速度大小是怎么变化的?能画出速度图像吗?
(4)P点合力方向向上还是向下?
……
关于疑问(3),文献[1]作者通过MATHCAD给出结论:在一个周期内小球合速度先变大再减小,然后变大最后减小.
关于疑问(4),文献[2]作者通过动力学方程分析出P点合力方向向上.
通过查阅更多文献,发现对该弹簧摆研究内容不少,但大多是面对大学层次学生的教授,通过MATLAB,MATHEMATICA,MATHCAD等软件进行数值模拟,或者是如文献[2]通过实验进行探究.但MATLAB,MATHEMATICA,MATHCAD等软件对中学教师来说使用难度较大,GeoGebra软件不仅使用简单,无需编程,而且同样可以进行数值模拟,对中学物理教学有很大帮助.
接下来,本文针对疑问(1)、(2),借助GeoGebra软件进行探究.
2 建立模型
以弹簧悬挂点为原点建立如图2所示的坐标系,图2所示为任意时刻小球所在的位置P(x,y).开始时θ=90°,小球处于水平位置,弹簧处于原长L0,设弹簧劲度系数为κ,小球质量为m.

图2 建立坐标系
2.1 微分动力学方程
对小球分别进行水平方向和竖直方向上的受力分析.
在水平方向上有

(1)
在竖直方向上有

(2)
其中
整理可得,水平方向
(3)
竖直方向
(4)
x(0)=L0y(0)=0

2.2 GeoGebra数值模拟
实际上,不同的初始摆角、劲度系数、小球的质量、弹簧的原长等都会影响弹簧摆的运动规律[3].本文由题意知,小球是从水平位置下落,所以初始条件设为θ=90°.为方便起见,不妨设弹簧原长
L0=20 mg=10 m/s2
κ=1 N/mm=0.01 kg
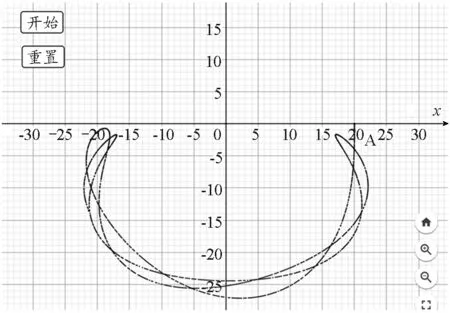
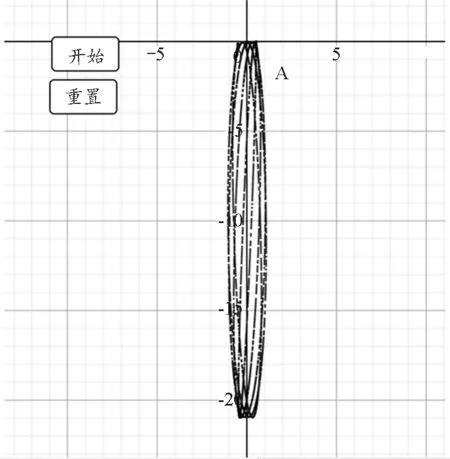
用GeoGebra描绘小球运动轨迹如图3所示,小球的速度与水平位移的关系图如图4所示,小球重力势能、弹性势能、动能与水平位移关系图如图5所示,B,D,C3条线分别代表重力势能、弹性势能、动能.图6则是任意时刻小球的重力势能、弹性势能与动能具体数值,可以看出三者能量守恒,总和为零.

t=50 s;L0=20 m;

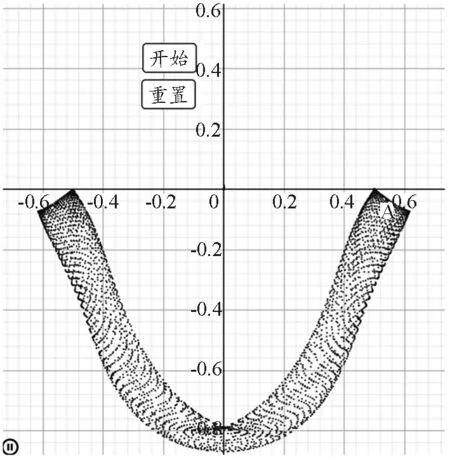
图4 速度和水平位移的关系图

图5 小球重力势能、弹性势能、动能与水平位移关系图

图6 任意时刻小球的重力势能、弹性势能与动能
2.3 图形分析
2.3.1 轨迹图
在L0=20 m,κ=1 N/m,m=0.01 kg时,图3是该弹簧摆的运动轨迹图,其轨迹近似是半个圆周,在悬点正下方小球的速度是水平的.
2.3.2 速度与水平位移关系图
由图4可知,从下落开始,小球的速度先增大后减小,最低点速度达到最大,且呈周期性变化.
2.3.3 重力势能、弹性势能、动能与水平位移关系图
由图5可以看出,小球从下落开始,在一个周期内,重力势能先变小后变大,弹性势能先变大后变小,动能先变大后变小.整个系统能量守恒,不过弹性势能对整个系统影响较小.
2.4 拓展分析




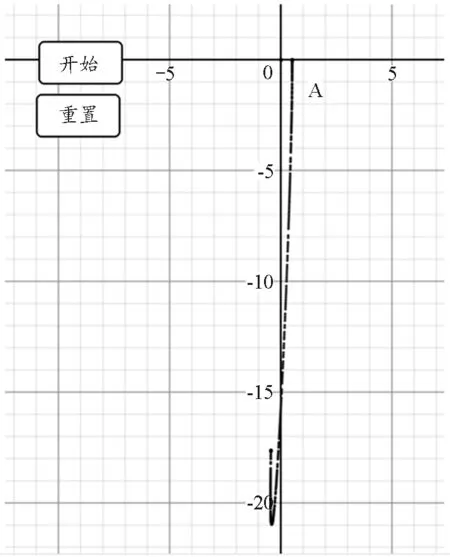
此外,在三维模型中,若给小球一个y轴方向的初速度,设
运动轨迹如图10所示.由图可以看出,小球的运动轨迹像一朵盛开的莲花,从而更能体现出弹簧摆问题的复杂性与多样性.

图10 在三维模型中小球运动轨迹像莲花
3 结论与反思