三自由度气动并联平移机器人平台的设计
2021-03-04朱爱东
王 波,王 涛,朱爱东
(北京理工大学 自动化学院,北京 100081)
随着工业化进程的加快,传统手工操作领域中以机器人代替自然人完成操作已成为一种不可逆转的趋势。国务院2015年5月印发的《中国制造2025》国家战略中,机器人被列为政府需要大力推动实现突破发展的十大重点领域之一[1-3]。在电子、轻工、医药及食品等行业中,通常需要以很高的速度完成诸如包装、分拣等抓放操作,且被操作对象具有重量轻、体积小的特征,使用高速并联机器人来提高自动化程度和保证产品质量,已被众多厂家所采用并具有广阔的发展前景[4]。
本文设计了一种三自由度气动并联平移机器人平台,将结构设计、执行驱动、传感检测、计算机接口、软件编程、算法设计等环节集成在整个系统中,把负载变化、摩擦力、死区、饱和、非对称性等实际工程因素融合在控制系统中。利用该平台进行实验教学,可以培养学生的分析、综合、设计、探索和创新能力,提高学生的工程素养。
1 气动并联平移机器人平台的设计
1.1 平台结构设计
针对气动并联平移机器人的三自由度平移运动需求,分别设计驱动臂机构和辅助臂机构,前者驱动并联机器人运动,后者随驱动臂运动并约束并联机器人的转动自由度。采用螺旋理论设计辅助臂结构,通过分析并联平移机器人自由度与辅助臂自由度之间的关系,确定辅助臂的运动螺旋系,根据辅助臂的运动螺旋系选择运动副并完成辅助臂的结构设计。
气动并联平移机器人结构设计如图1所示,由固定平台、末端平台、3组相同的驱动臂和辅助臂组成。驱动臂为结构,由上球铰(S副)、气缸(P副)和下球铰(S副)组成,其中表示气缸为并联机器人的驱动机构。3个驱动臂气缸伸出或缩入带动末端平台进行空间运动。辅助臂为CPR结构,由直线导轨、上轴承、花键轴和下轴承组成,其中直线导轨与上轴承组合实现C运动副、花键轴实现P运动副、下轴承实现R运动副。辅助臂中C运动副的转轴与R运动副的转轴平行,3个CPR辅助臂的C运动副轴线不互相平行,C运动副轴线均与固定平台所在平面平行,R运动副轴线均与末端平台所在平面平行。1个CPR辅助臂约束末端平台垂直于C运动副轴线的2个转动自由度,3个辅助臂组合约束末端平台的3个转动自由度。气动并联平移机器人的实物如图2所示。末端平台安装有真空吸盘负责物体的抓取和放置。

图1 气动并联平移机器人平台结构简图

图2 气动并联平移机器人平台实物图
1.2 平台系统组成
气动并联平移机器人平台的系统组成如图3所示。使用3个带位移传感器的气缸作为驱动机构,采用3个比例方向阀控制驱动臂的气缸。上位机发送控制目标信号给伺服控制器,并接收伺服控制器传回的信号实时显示机器人的运动信息。伺服控制器根据上位机传来的目标位置信号和位移传感器采集的位移信号,经过控制算法输出3个相应的控制量,经D/A转换后驱动相应的比例阀动作。气动并联平移机器人平台系统的主要元件组成如表1所示。
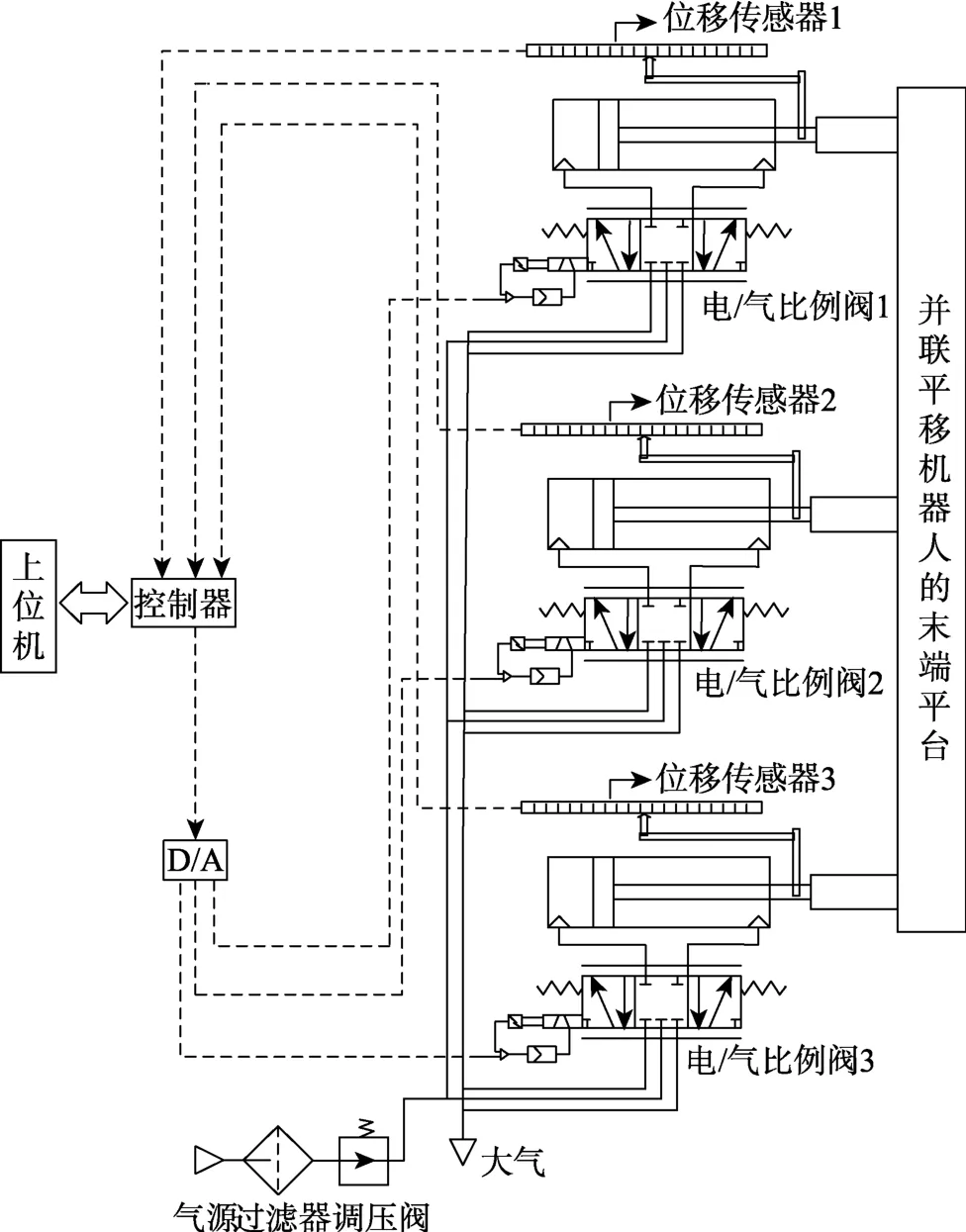
图3 气动并联平移机器人平台的系统结构框图

表1 气动并联平移机器人平台系统的主要元件组成
气动并联平移机器人平台伺服控制器的结构框图和实物分别如图4和5所示。伺服控制器包括CPU模块、数字量伺服控制模块和模拟量伺服控制模块,分别负责通信与管理控制器各子模块、执行数字量控制算法和执行模拟量控制算法。3个模块的MCU均采用STM32F407芯片,其工作频率可达168 MHz[5-7],可满足系统运动控制的需要。CPU模块采用RS232与上位机实时通信,采用CAN总线与各个扩展模块通信;数字量伺服控制模块具有8路数字量输入输出功能,输入输出模式由编程确定,输入信号采用 TLP290-4双向光耦隔离,输出信号采用TLP206G光耦隔离;模拟量伺服控制模块采用2片ACSL-6400芯片处理3路A/B相正交信号,D/A部分采用AD5754芯片输出3路0~10 V模拟量信号。
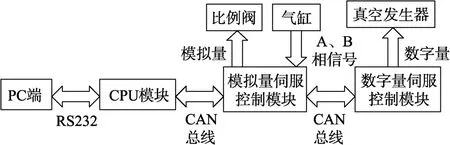
图4 伺服控制器结构框图

图5 伺服控制器实物图
2 气动并联平移机器人平台的运动学仿真
2.1 运动学逆解仿真
运动学逆解仿真框图如图6所示。在ADAMS中建立气动并联平移机器人虚拟样机,并在其末端平台添加运动轨迹,在3个驱动臂上添加速度和位移测量。在 MATLAB中根据气动并联平移机器人虚拟样机的结构参数、末端平台的运动轨迹、运动学逆解和雅克比矩阵,分别计算气动并联平移机器人运动过程中 3个驱动臂位移和速度的理论值。将 MATLAB计算出的位移和速度与ADAMS中测量出的位移和速度进行比较,验证气动并联平移机器人运动学逆解的正确性。
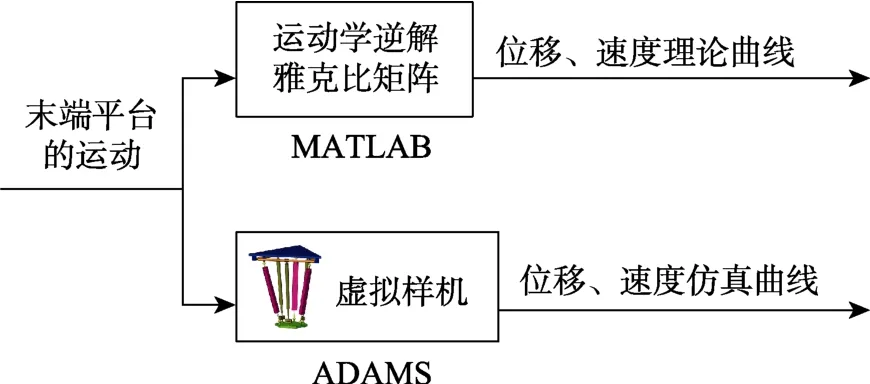
图6 运动学逆解仿真框图
3个驱动臂的位移和速度仿真曲线分别如图7和8所示。可以看出,3个驱动臂在ADAMS运动仿真中的位移和速度曲线与 MATLAB的理论位移和速度曲线重合,验证了气动并联平移机器人平台运动学逆解和雅克比矩阵的正确性。
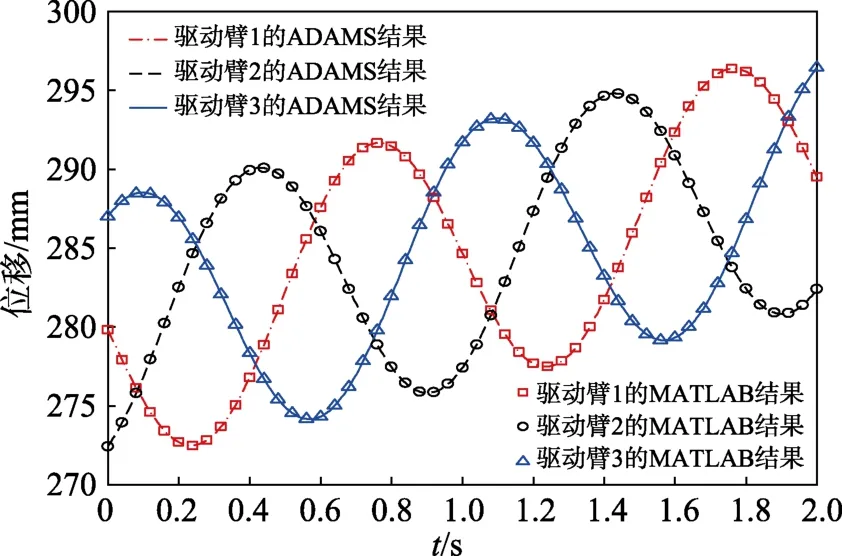
图7 驱动臂位移仿真曲线

图8 驱动臂速度仿真曲线
2.2 运动学正解仿真
运动学正解仿真框图如图9所示。从虚拟样机的ADAMS运动仿真中导出3个驱动臂的位移数据,根据这些位移数据由运动学正解表达式可以求解出末端平台中心的空间运动轨迹。

图9 运动学正解仿真框图
求解得出的末端平台中心的运动轨迹和预期设计的运动轨迹如图10所示。可以看出2条运动轨迹重合,验证了运动学正解的正确性。
3 气动并联平移机器人平台的运动控制

图10 末端平台位移仿真曲线
气动并联机器人平台运动时,3个驱动气缸末端的负载会不断变化且气缸自身的摩擦力也无法准确计算出来,因此3个驱动臂组成的阀控缸系统实际是一个含有不确定项且具有较强非线性的系统。线性自抗扰控制器(linear active disturbance rejection control,LADRC)主要包括线性跟踪微分器、线性扩张状态观测器和线性状态误差反馈控制律,是一种针对含有不确定性项非线性系统的控制方法[8-10]。线性自抗扰控制器各个组成部分均由线性环节组成,便于参数整定。针对本系统而言,通过设计线性扩张状态观测器,对阀控缸系统中时变的负载和活塞受到的摩擦力等不确定项进行观测,在控制过程中进行补偿。为了验证所设计控制算法的有效性,分别采用PID算法和LADRC算法进行气动并联平移机器人平台的空间轨迹跟踪实验,跟踪轨迹为空间螺旋曲线,实验结果如图11所示。可以看出,与PID算法相比,LADRC算法可以有效地改善气动并联平移机器人的控制效果。
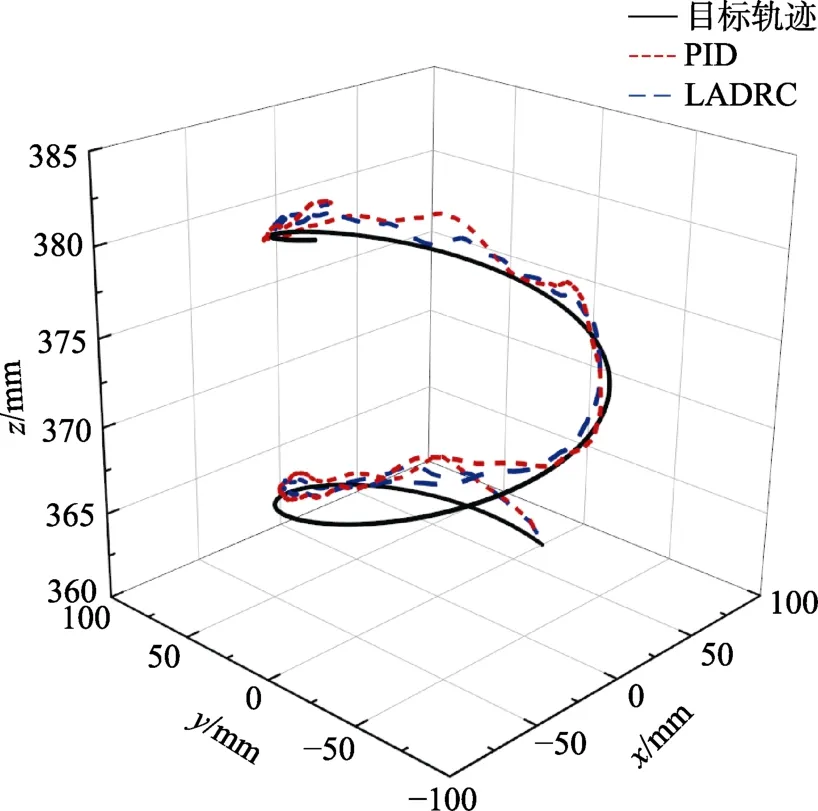
图11 末端平台空间轨迹
4 气动并联平移机器人平台的实验设计
气动并联平移机器人平台为自动化及相关专业的本科生和研究生提供了良好的实验平台,有助于学生深入理解和掌握工业机器人的相关知识。学生在该平台上可以深入研究智能控制算法、先进图像处理算法和多对象协调控制算法等,从而大大提高工程实践能力和创新能力。
实验教学内容的层次化设计如下:
(1)本科生。熟悉机械结构、驱动方式、传感技术,实现位置控制。
(2)硕士生。进行机械结构的优化设计、协调控制算法的研究,实现伺服控制。
(3)博士生。进行多传感器信息融合、运动规划的研究,实现智能控制和网络化控制。
5 结语
本文设计了一种三自由度气动并联平移机器人平台,整合了机械、电子、单片机、传感技术和控制算法等多方面的专业知识,可用于自动化及其相关专业实验教学,有利于培养学生分析、综合、设计、研究探索和创新能力,提高学生的工程实践素养。
