基于静场的手势控制系统设计及空调应用
2021-03-03毛跃辉
毛跃辉
MAO Yuehui
珠海格力电器股份有限公司 广东珠海 519070
Gree Electric Appliance, Inc. of Zhuhai Zhuhai 519070
1 引言
随着智能技术的飞速发展,手势控制、语音识别等人机交互技术逐渐应用于消费电子领域,语音识别技术目前相对比较成熟,已在部分产品上工程落地。手势技术是继语音识别技术后又一智能技术,目前该技术得到行业的大力研究和工程推广,如智能电视、智能空调、智能体感游戏等,人机交互控制方式由传统的按键操控、红外遥控、APP控制等线性界面操控方式逐渐转化为“即效非接触式非线性界面”手势控制方式,让用户随时伸手即控制,具有较强的视觉冲击,科技感和互动性好,适用于静音场合和特殊人群产品。此类手势控制技术一般都基于图像识别技术衍生,运行算力大,对硬件资源要求较高、成本高,同时受周边亮度、光照等因素影响较大,且用户学习成本高。
本文提出一种基于静场的实时动态近场手势控制系统,以区别于基于图像识别手势控制系统,该系统实时性好、成本相对低,受环境因素影响少,用户对手势学习成本低、体验自然度好,识别率高,适合在厨房电器(如油烟机等)、立式空调、落地风扇、家用电梯等产品上应用,尤其适合在小孩和老年人产品上使用,易学易用,方便家电产品的控制,提高人机交互的实用性。
2 静场手势控制的基本原理
人手在空间三维静电场中运动时,手指会切割电场线,从而改变场强的变化。静电场手势控制就是检测这种电场强度的变化,把其转化成数字信号,通过与内部存储器中的信号对比、识别,判断出人手的动作,然后把其输入到主控,应用主控根据该动作信号对现有的控制模式及功能做出更改。
芯片生成励磁电压,频率在100 kHz左右,励磁电压作用于发射电极与接地层,最终建立起一个电场,电场从发射电极扩展到电极之上的扫描区域。施加交流电压时电荷会随着时间变化,从而产生变化的电场。当电荷随着频率按照正弦曲线变化时,产生的电磁波特性波长λ=c/f(其中c是波速,即真空中光速)。
在波长比电极几何尺寸大很多的情况下,磁分量实际为零,且不会传播电波。由于励磁电压波长远比电极尺寸大,贯穿扫描区域电场就非常均衡,电场由电荷产生,它分布在围绕表面带电物体的三维空间中。图1为未失真电场的等电位线图,图2为失真电场的等电位线图。

图1 未失真电场的等电位线

图2 失真电场的等电位线
图1、2中:Field lines-电场线;Equipotential lines-等电位线;isolation-隔离;Transmitter-发射器;Receive-接收器;Ground-地。
如图2,当用户将手伸进扫描区域,电场就会随之发生变化。电场线必须接近与导体表面呈垂直状态,手旁边的电场线由于人体自身导电特性产生分路,手伸进感应区域位置对等势线产生压迫,并且降低电极信号电平。在人手或手指进入电场时,电场会失真,由于人体本身导电性,电场线会被引向人手并分流到地,本地的三维电场会减小。
静电场手势控制技术需使用最少5个接收器(RX)电极,用于检测不同位置电场变化,以测量电场失真(偏离所接收到的不断变化信号)的根源,该信息用于计算位置、跟踪移动和区分移动模式(手势)。图2模拟结果显示接地的人体对电场的影响,人体的接近会导致等电位线挤压,并将接收器(RX)电极信号电平平移至较低电位,从而得以测量。图3为所用的静场手势传感器整体设计效果图。

图3 静场手势传感器整体设计效果图
3 静场手势控制模式与控制系统设计
3.1 功能模式基本设计
控制过程中,需要对动态手势符号进行定义,根据定义后的手势控制空调各种负载运行(示例基础功能但不限于此),控制要求及相应模式设计如下:
(1)手势控制操作要求:
①要求在手势传感器范围内操作,偏离此区域可能出现不识别或误动作;
②要求距离面板(手势传感器区域)15 cm内进行指定动态手势操作,超出此距离可能导致不识别或误动作。
(2)静场手势操作实现的控制功能如下:
①TOUCH(开/关机):初始关机状态下,在由传感器围成的区域范围内进行任一点以上触摸,检测到此手势动作,运行状态转换;
②TOUCH(模式切换):该【TOUCH 2】方式为触摸控制板4个传感器,该传感器按照方向分别定义为【左】、【右】、【上】、【下】;
③触摸传感器【左】定义制热模式;传感器【右】定义制冷模式;传感器【上】定义为自动模式、抽湿模式、送风模式;传感器【下】定义为风速设定。其中,传感器【左】和传感器【右】均为单次触摸即可实现制热/制冷模式功能转换;传感器【上】为循环触摸功能转换:转换顺序按照:自动模式、抽湿模式、送风模式运行;传感器【下】为风速循环触摸功能转换,转换顺序:低风档、中风档、高风档、超高风档运行;
④扫风和导风模式切换:右挥手定义扫风模式,左挥手定义扫风模式,上挥手定义导风模式,下挥手定义导风模式,左右连续手势动作定义自动扫风,上下连续手势动作定义为自动导风;
⑤AIR WHEEL(设定温度调节):当手势连续顺时针画圈定义为设定温度上升;当手势连续逆时针画圈定义为设定温度下降:即【温度+】和【温度-】,调节范围为16℃~30℃。
上述相关手势符号定义汇总如表1。
3.2 静场手势控制系统设计
静场控制器是一款混合型信号控制器,具有1个发送通道和5个高灵敏度接收通道,能够检测对应10~15 F范围内电容变化的发送电场失真。发送和接收电场电极与控制器的发送和接收通道相连,电极空间分布使芯片可以确定电场失真的重心,并在检测空间中对用户的手进行易懂路径及位置跟踪,并从移动路径中提取出手势,从而实现近场动态手势控制,与目前成本较高的基于图像识别的动态手势[5]控制相当。手势检测与识别提取、空调主控控制设计流程如图4、图5示意。
本系统设计的控制器由手势检测传感器模块、MGC3130控制模块、嵌入式Gest IC库模块、外部电路模块等4个关键主要模块组成,整体控制原理图如图6所示。

表1 静场动态手势符号定义汇总表

图4 手势检测与识别的提取流程图

图5 主控控制流程图
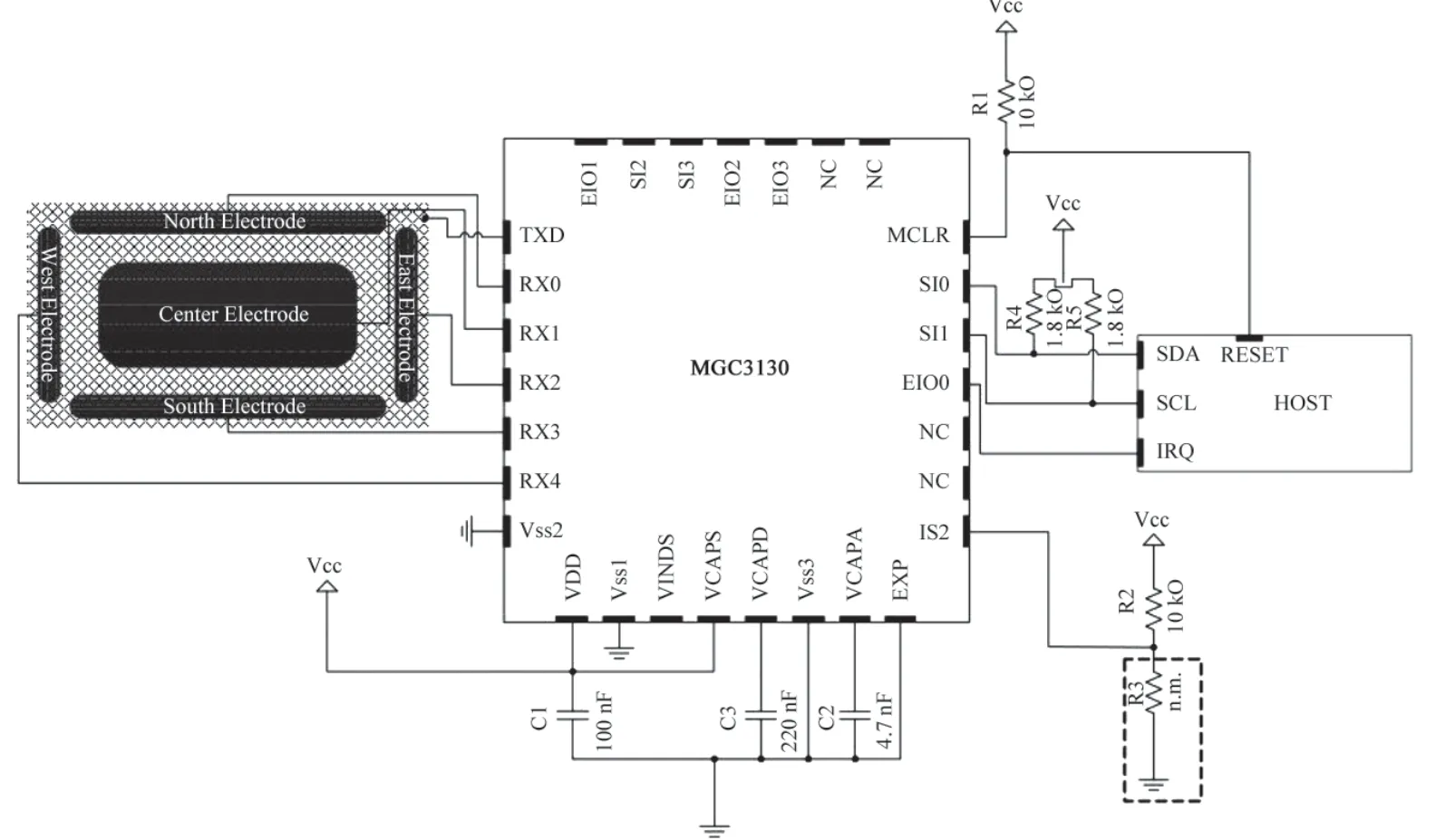
图6 控制系统设计实现原理图
(1)检测传感器模块电极设计
传感器模块电极使用双层电极设计,电极布线如图7。电极内置在PCB,包含1个发送电极和5个接收电极(东、西、南、北、中),各放置在不同层上。电极外边缘尺寸为148 mm×98.7 mm。感应区域纵横比为3:2。电极布线基于使用FR4材料的4层PCB设计,使用以下功能层如图7:
①第1层(顶层):接收电极;
②第2层未使用;
③第3层:发送电极和接收馈线;
④第4层(底层):地。

图7 电极布线图
接收电极设计包括4个框架形电极和1个中心电极,框架形电极是根据其方位(北、东、南、西)来命名的。4个接收框架形电极的尺寸限定了最大感应区域,中心电极(阴影线区)采用结构化设计以得到与4个框架形电极相似的输入信号电平。发送电极占据接收电极下面的整个区域,采用结构化设计以减小接收电极和发送电极之间的电容(CRXTX)。中心电极下面的区域占覆铜平面的50%,周围区域仅占20%。接收馈线走线到第3层。它们嵌入到发送电极中见图7和图8,以屏蔽馈线。在目标系统设计中,不需要GND层,添加该层作为样机验证模块板的屏蔽层,并可模拟静态组件的存在,这些组件放置在感应电极下目标器件中。为保持接地电容(CTXGND和CRXGND)小于1 nF,GND层采用40%区域覆铜结构设计。电极设计尺寸如表2,整体检测区域最终效果图如图9所示。
(2)MGC3130控制模块设计
MGC3130模块主要组成:低噪声模拟前端、数字信号处理单元、通信接口。该控制器可以提供用于产生电场的发送信号,调节接收电极的模拟信号,以数字形式处理这些数据,并与主控进行数据交换通信,相应框架如图10。

表2 检测电极设计尺寸参数表

图8 检测传感器PCB板的层叠图

图9 整体检测感应区域效果图

图10 MGC3130控制器
(3)Gest IC库模块设计
嵌入式Gest IC库优化结合MGC3130芯片,确保连续实时自由空间位置跟踪和手势识别连续性,该库可以配置,并允许分别为每个应用和电极布局确定必需的参数。
(4)参考电路及I2C到USB桥接器设计
由单个3.3 V电源供电,通过板上的复位按钮或PIC18F14K50控制MGC3130复位,并以I2C实现与USB桥接器的通信。其次,为了抑制辐射的高频信号,通过1 kΩ电阻将芯片的5个接收通道连接到电极。MGC3130和主控之间的通信通过I2C到USB桥接器部分控制,消息交换由PIC18F14K50USB单片机处理,PIC18F14K50用于在LED条形显示屏上指示通信状态以及控制MGC3130硬件复位。模块板通过USB端口供电,采用Microchip低压差稳压器MCP1801,用于将5 V的USB电源转换为MGC3130和PIC18F14K50所需的3.3 V电源。
(5)电极电容参数选型设计及灵敏度曲线要求,电极电容参数选择如表3,相应电极灵敏度要求曲线如图11-12所示。

图11 从西到东灵敏度曲线

表3 电容电极参数选型表
4 实验过程及结果分析
4.1 实验设计
本次测试样机选择玻璃面板的柜机,传感器安装在玻璃面板内侧,安装时需要保证传感器板与空调面板玻璃紧密接触。实验样机组装图如图13所示。
验证静场手势传感器内置空调后,环境因素是否对该传感器控制造成干扰,该实验共经历5项内容验证:
(1)开关电源供电干扰实验
判断标准:本次手势控制板供电电压为3.3 V,开关电源的开关频率和功率密度引起的电磁环境不对传感器工作造成影响。
(2)面板材料干扰反应灵敏度实验
判断标准:安装现有柜机面板背面,上电工作面板材料对功能操作没有影响,不能出现误动作或反应灵敏度下降。

图12 从北到南灵敏度曲线

图13 实验样机组装图
(3)温湿度干扰实验
①低温实验:将装好传感器的整机放入工况试验室中试验,室外侧干球温度设定为-20℃(RH30%),开机放置2 h后,送风模式下进行手势控制器的测试,期间进行手势控制和触摸操作,各种功能指示、显示是否正常。
②高温实验:将装好传感器的整机放入工况试验室中试验。室外侧干球温度设定为40℃(RH90%),开机放置2 h后,送风模式下进行手势控制器的测试,期间进行手势控制和触摸操作,各种功能指示、显示是否正常。
判断标准:试验过程中整机运行正常,各种功能指示、显示器必须能正常显示,不会出现模糊、暗划、缺划甚至不显示等现象,手势控制反应灵敏度高、无误操作。
(4)EFT和静电干扰实验
EFT要求通过4 kV(峰值),静电放电需满足如下要求:
①实验前对将要试验的所有控制器上电检测,保证试验前控制器各部件完好,所有功能正常运行;
②控制器抗静电值大于等于15 kV;
③对于测试的控制器在小于15 kV时出现了不可恢复的功能故障,控制器静电测试判不合格;
④取3块控制器,试验过程中有其中任1块控制器抗静电值小于15 kV,则此款控制器抗静电试验判不合格。
(5)环境自适应校正测试

图14 环境自适应测试校正曲线
4.2 实验结果分析
(1)开关电源供电干扰实验结果:开关电源对传感器的供电不产生影响,手势传感器可以正常使用,无失效情况发生。
(2)面板材料的影响程度实验结果:由于手势传感器的特殊情况,接触面不能使用金属材质,正常使用中选用非金属材料,目前面板测试时选择材料为:亚克力板、玻璃面板、喷涂面板。实验结果显示:亚克力板、玻璃面板、喷涂面板对手势基本无影响,可以通过试验。
(3)温湿度干扰实验结果:分别在环境温度-15℃和40℃下静置2 h后开启,通过实验后各项手势功能均能正常工作,灵敏度均未见降低。
(4)EFT和静电实验结果:EFT和静电实验符合企标要求,验证合格。
(5)模拟前端环境自适应校正实验结果:通过校正软件对手势传感器的干扰因素进行校正,最终校正测试结果如图14示意,相应校正后的曲线满足灵敏度测试要求,跟随性较好,无卡顿滞留现象出现。
5 总结
通过对静场手势识别系统的设计研究,并在实际样机上进行实验验证,相应结论总结如下:
①手势传感器安装部位及附近接触面不能使用金属材质,正常使用中选用非金属材料,避免检测干扰。研究结果显示,对非金属材料选用基本无特殊性要求,对结构安装约束性少,基本覆盖现有空调的常规面板材料,可做到通用性;
②手势传感器PCB板建议设计为5寸,便于配合结构安装,可满足常规机型的通用要求;
③手势传感器与主控之间采用I2C通讯方式,保证相关控制功能得到可靠执行;
④提供传感器的供电电压必须保证3.3 V,若电压与控制电压稍有不符,通讯将无法正常实现,手势无法获得精确控制,此点设计时需要严格遵照,需单独采用专用I2C芯片进行供电电路设计;
⑤实际样机上进行验证,设计满足产品应用要求,实现了相关预定控制逻辑功能,设计成果将进一步向其他智能产品推广应用。
综上所述,在近场手势控制领域,该系统设计成本相对图像识别手势控制系统低、受结构安装和产品安装表面材料影响极低,便于结构设计快速迭代,对硬件算力要求不高,占用资源要求较低,便于硬件模块及系统的低成本设计,功能的低成本升级开发,能较好的适用于非接触、近场操控场景产品,具有较高的推广应用价值和较高的综合性价比。
