基于永磁同步电机的空间矢量控制研究
2021-03-03邹云飞吴传贵王洪涛王纬国
邹云飞 ,吴传贵 ,王洪涛 ,王纬国
(1.国营芜湖机械厂;2.安徽省航空设备测控与逆向工程实验室,安徽 芜湖 241007)
永磁同步电机应用广泛,其闭环控制策略包括空间矢量控制、直接转矩控制等,空间矢量控制将定子电流矢量分解成交直轴两个部分,通过对这两个电流相位和幅值进行调节,从而达到控制电机的目的;对于直接转矩控制,该方法无须复杂的坐标变换,直接在两相静止坐标系直接对转矩和磁链进行控制,因此,转矩响应速度快;此外,针对高速应用场合还有弱磁控制,在电枢电压到达逆变器极限时,可以通过减小气息磁链保证转速继续升高。
1 PMSM控制原理及数学模型
1.1 永磁同步电机数学模型
图1中,将三相PMSM的内部等效为三相电阻、电感及反电动势,得出定子的三相电压方程(1)式。式中,ua、ub、uc为定子相电压;ia、ib、ic为三相定子电流;Ψa、Ψb、Ψc为永磁同步电机的三相定子磁链。
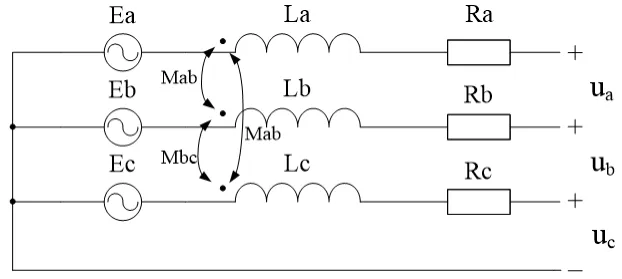
图1 永磁同步电机模型

其中,Ψa,Ψb,Ψc的计算公式(2)所示:

公式(1)(2)通过CLARK变换和PARK变换将三相静止坐标系转换到两相旋转坐标系,计算得到同步旋转坐标系下的PMSM模型公式(3)及转矩方程(4);其中,转矩方程分为永磁转矩和结构转矩。
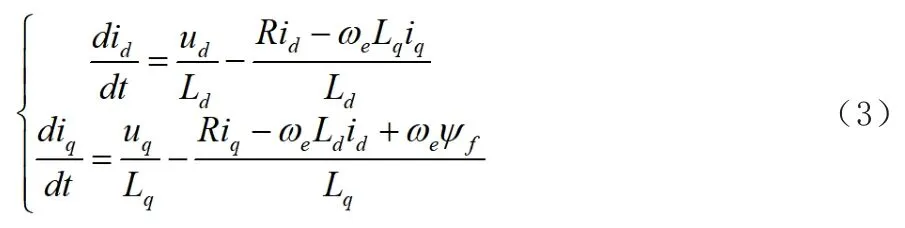

式中:ud、uq、iq、id分别为d,q轴电压和电流;R、Ld,Lq、Ψf分别为PMSM定子绕组电阻,d、q轴电感及永磁体磁链;ωe为转子电角速度;Te、TL、p分别为电磁转矩、负载转矩和极对数。
1.2 永磁同步电机空间矢量控制方法
永磁同步电机转速控制是通过对q轴转矩电流的调节来实现,在隐极式永磁同步电机Ld=Lq,式(4)中的结构转矩部分为0,仅存在交轴转矩,因此,设置d轴电流给定为0,即可实现PMSM的最大功率输出。其控制框图2所示,包括SVPWM模块、PID模块、CLARK/PARK模块。
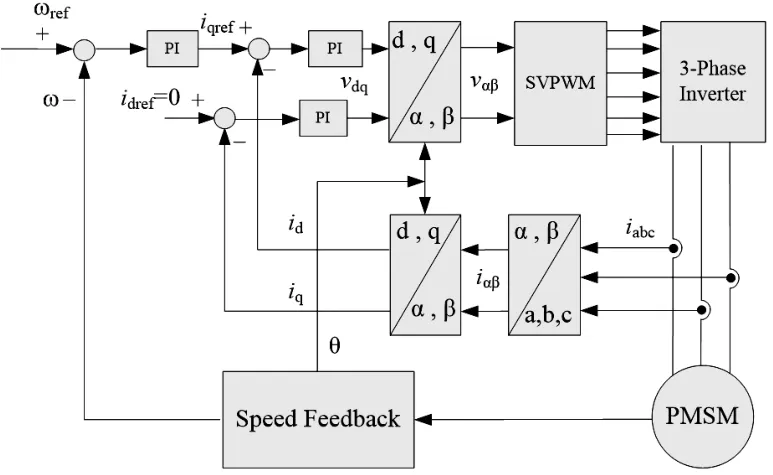
图2 MATLAB算法仿真框架
1.3 SVPWM 调制方式
空间矢量脉宽调制(SVPWM)的线性调制范围宽,提高了直流电压利用率;输出谐波小,使电流波形畸变减小,降低电机转矩。
图3(a)所示为三相电压源逆变器主电路,设以直流侧中点O作为参考点,则上管导通时输出电压为Ud/2,下管导通时输出电压为-Ud/2。保持其电压幅值不变,由Park变换定义的电压空间矢量为:

按(5)式定义,逆变器可以输出八个电压空间矢量,如图3(b)所示。其中,(000)和(111)为零矢量,其他矢量长度为2/3Ud。对称的三相正弦变量合成将得到一个幅值固定的匀速旋转空间矢量。参考矢量的等效矢量按幅秒平衡原则合成。则:

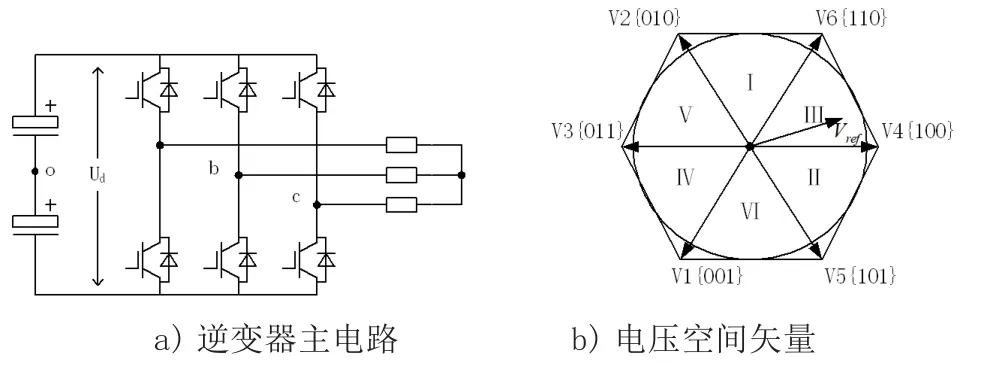
图3 SVPWM原理示意图
式(6)中,矢量Vref在T时间内所产生的积分效果和V4、V6及零矢量作用T4、T6、T0时间的积分效果相同。将V4、V6代入(2)式得:

零矢量只是补足T4、T6以外的时间,它对矢量的合成不产生影响。由(3)式的实虚部可求得T4、T6:
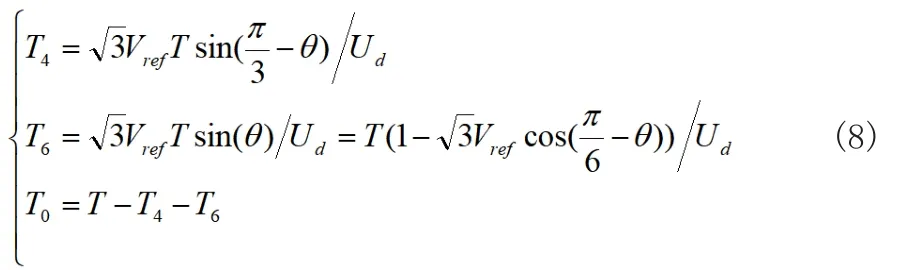
随着参考电压矢量Vref长度的增加,输出的基波电压幅值也线性增加,T4、T6也逐渐加大,T0逐渐缩短。
2 空间矢量控制仿真
PMSM仿真参数:极对数p=2,额定电流5A,额定电压100V,永磁体磁链0.924EB,定子电阻1.2Ω,dp轴电感8.4mh,逆变器采用普通两电平逆变器,母线电压54V,开关频率16K,SVPWM调制方式。
图4为600r/min电机启动仿真波形,带50N·m启动;0.1s时,转速介跃至900r/min;图5为空载启动-转矩阶跃仿真波形,空载启动,0.1s负载转矩阶跃到N·m,从图4、5中可以看出在启动状态、转速阶跃系及转矩阶跃时,电机驱动系统通过控制器调节获得良好的动静态性能。
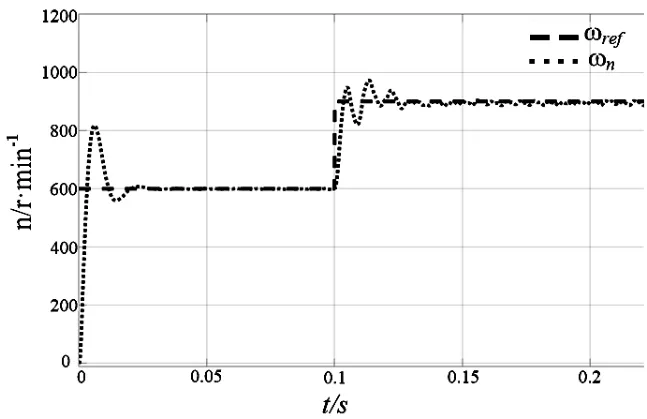
图4 电机启动及转速阶跃仿真波形
3 硬件设计及实验结果
控制器采用STM32F405,电路拓扑为两电平全桥电路,使用ABC三相电流采样,电机极对数p=4,额定电压24V,额定转速3000RPM,线电阻0.6欧姆,线电感0.75mH。
图6为电机启动波形,CH1通道为电机转速波形,CH2为转子相位,CH3为A相电流,轻载启动时,转速稳定上升到600r·min-1。图7为,转速600阶跃到900。从实验波形中可以看出,PMSM的矢量控制算法可以稳定地调节电机转速,实时性好,控制稳定。
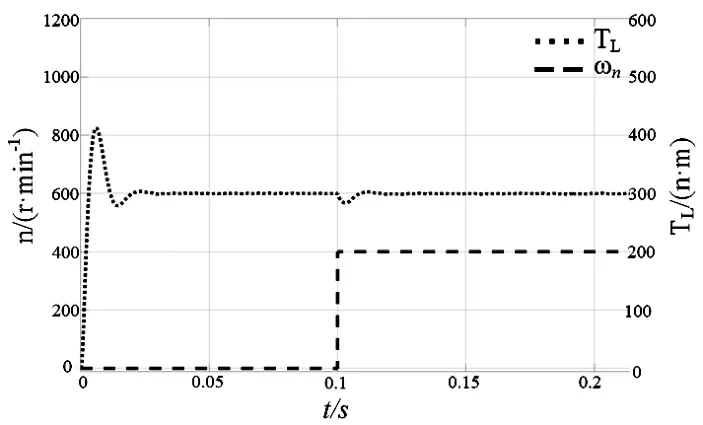
图5 电机启动及转矩阶跃仿真波形
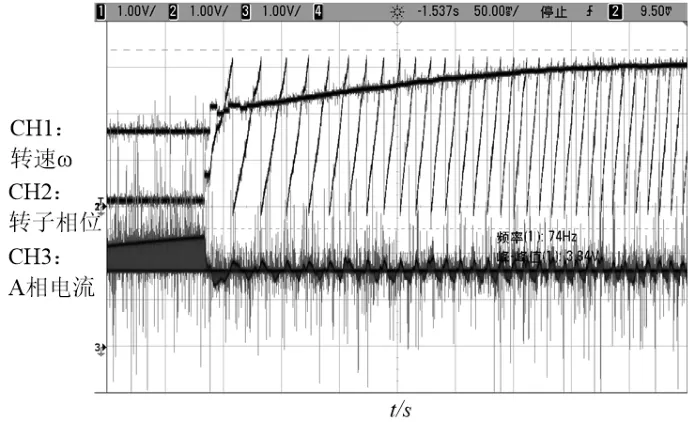
图6 电机启动波形
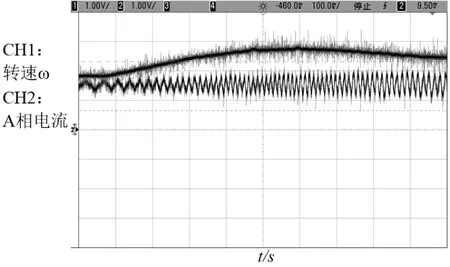
图7 转速阶跃波形
4 结语
仿真和试验表明,基于PI控制器的矢量控制策略具有优良的动态性能,实现了d,q轴的完全解耦,且在一定控制范围内对电机参数变化不敏感;电流、转速超调小,动态响应时间短、调节器参数易于调节,且适用范围广、控制稳定。