基于模糊控制的LED路灯节能系统研究
2021-03-02包头市住房和城乡建设绿色发展促进中心
包头市住房和城乡建设绿色发展促进中心 肖 鹏
随着经济建设的不断发展,对智慧城市建设提出了绿色、环保、节能、智能化等要求。传统的路灯是定时定点控制,控制简单,但是一旦发生故障无法实时控制,知道时已经影响到了人们的出行和电能资源的浪费。本文以LED路灯为研究基础,根据不同季节不同时段路灯的开关和调光操作来设计模糊控制器。将LED路灯的最小输出功率作为控制目标,引入模糊控制算法,可以实现路灯自由开关和调节光照强度的目标。通过建立模糊控制器、MATLAB仿真和实时数据分析,模糊控制方法可以满足人们安全行驶的最低照度下,实现了对路灯的最优控制,满足人们高效节能出行。
近些年,对于路灯控制系统的最基础的控制算法研究是PID控制算法,PID控制算法在连续变量控制系统中应用的十分广泛,主要是用于控制线性,不变的数据模型为基础,利用PID参数整定来实现预期的控制效果。在路灯控制系统中引入PID控制策略,通过大量数据表明可以实现在规定时间内完成光源的自动调节,但是存在着一定的误差。考虑到路灯启动开关的非线性和时变性特点,PID控制算法的应用就收到了局限性。目前,应用最为广泛的智能控制算法包括模糊控制、神经网络控制、BP遗传算法等等。根据路灯的特殊性,我们采用了模糊控制算法,模糊控制不需要建立准确的数据模型,它是以人们的长期经验来制定的模糊控制规则,以语言规则为控制基础的控制方式。这种控制算法具有操作容易,适应性好等优势。本系统是将传感器采集的路面人和车辆的声音信号经模糊控制器,模糊控制算法处理后将信号给功率变换单元,实现路灯端电压的调节,从而实现了调节光源亮度,达到了节能的目的。
1 LED路灯模糊控制系统的总体方案
1.1 整体设计方案
新型智能LED路灯节能系统是通过照度传感器及运动传感器采集上传的数据信息对LED路灯进行实时的自动调节其亮度。在控制策略上采用了模糊控制方法,建立模糊输入输出的隶属度函数,制定模糊规则及模糊推理,解模糊等步骤完成模糊控制器的设计。通过模糊控制可以实现路灯端电压自动调节,从而在不影响正常行人出行的前提下,大大的降低了城市路灯照明耗电量。
路灯智能控制系统还打破了传统路灯的控制模式和管理模式。路灯管理中心可以直接通过可视化界面观察路灯的运营情况,同时遇到紧急状况,可以通过指挥中心手动控制任意一条街道路灯开关。在控制中心可以对路灯终端进行发送命令。路灯终端处理传感器上传的数倨与摄像头系统上传的图像信息,对道路情况进行实时监测与反馈,智能控制器根据反馈指令处理数据,在处理时采取模糊控制算法,按照上传数据推理出适宜的控制信号,从而实现对路灯的智能控制。
1.2 模糊控制流程
LED智能路灯节能控制系统中的控制方法采用的是模糊控制算法,在其系统中模糊控制应用的软件需要遵循下面的控制流程,其流程图如图1所示。首先系统启动运行,对系统中各个参数进行初始化设置,然后通过照度传感器采集路面照度信息并上传到路灯监控中心的上位机软件,系统通过模糊控制器的模糊算法来判断路面的照度是否是微暗(PM)状态,微暗状态是地面照度在5~15Lux。如果不在这个范围,那么发送命令,调整照度在这个区间。这样也起到了节能的目的。如果地面照度满足要求,第二个运动传感器采集是否有人或者车辆通过,如果采集的信号显示有人或者车辆通过,就发送命令调节亮度为PH,这时亮度是满级打开,这样可以满足行人和车辆的需求。如果没有监测到行人或者车辆就返回继续通过照度传感器监测信号,这样就进入到了下一个循环。

图1 模糊控制算法控制流程图
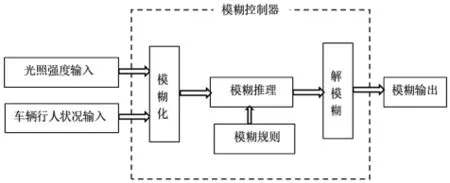
图2 模糊决策系统模型
2 基于LED路灯节能的模糊控制器设计
LED路灯自动控制系统是可以通过光亮的强度来控制LED路灯开与关的,并且设计出了定时电路作为路灯正常情况下的状态,如果光控开关发生了故障,那就可能导致路灯无论白天还是黑夜就一直点亮,为了不发生这种状况我们设计了定时自动控制的方法。这样更具有合理性,整个系统对于节能起到了十分有效的作用。但是由于季节性不同,不同地方白天和黑夜时间长短不同,需要重新调节LED路灯的开关时间,才能达到节能目的。
系统的输入量包括路面照度信息和路面行人、车辆情况信息,也就是照度传感器和运动传感器采集到的路面信息作为系统的输入。路灯即将需要打开的等级做为系统的输出。
2.1 建立系统隶属度函数
本文研究的道路照明主要应用在主干道中,那么根据道路照明规范标准,主干道在夜间的平均照度应该满足25Lux,其照度范围在15和30之间才能最为正常照度值。那么我们定义了照度传感器信息的论域是[0,40]。模糊化分为4个模糊子集:PH、PB、PM、PL。PH指的是照度过亮,照度值在30Lux之上。PB是指照度适中,照度值在15和30Lux之间。PM是指照度微暗,照度值在5和15Lux之间。最后PL指照度过暗,照度值在0和5Lux之间。运动传感器信息的论域为[0,24],分为两个模糊集,一是有运动的人或车辆P,此时运动传感器信号电压≥12V,二是无运动的人或车辆Z,其运动传感器信号电压≤12V。输出为路灯打开亮度等级,其论域为[0,10],分为11个等级,模糊化分为四个模糊集,一是PH:大开度,路灯亮度等级调至8~10,二是PB:中开度,其路灯亮度等级调至5~7,三是PM:微中开度,路灯亮度等级调至2~4,四是PL:小开度,路灯亮度等级调至0~1级。其隶属函数用三角函数形式,Ma应用Matlab仿真软件进行测试。
2.2 模糊决策仿真
模糊控制系统采用的是Mamdani推理算法,解模糊采用的是重心法。Mamdani推理算法是模糊控制系统中最常见的一种推理算法。应用Matlab仿真软件对模糊控制系统进行模糊控制器仿真。图3为模糊控制器仿真图。
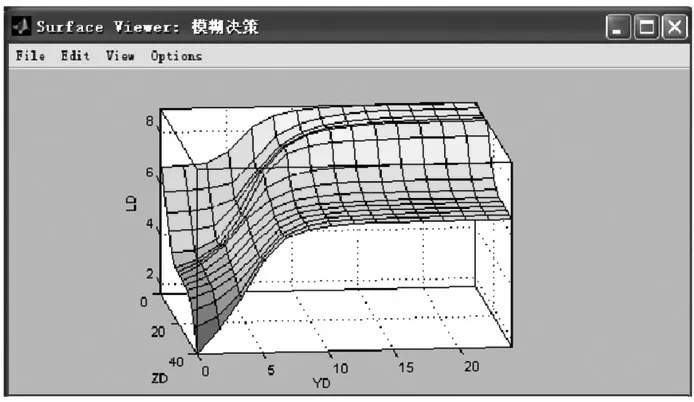
图3 模糊控制器仿真图
结论:本文是针对城市道路照明节能方面进行了研究,打破了传统定时定点路灯控制系统,引入了智能控制算法中的应用最为广泛的模糊控制。通过模糊决策的智能算法,获得了LED路灯最优光照强度等级的智能控制,不但能够满足人们正常出行需求,还可以最大程度上节约电能。同时,通过上位机软件实时监控,节省了大量的人力物力。这种智能化的城市LED路灯系统是智慧城市建设的必经之路。
