一种can总线技术机器人底盘设计
2021-03-02珠海科技学院刘颂阳陈汝杰林志彦李思翰
珠海科技学院 刘颂阳 陈汝杰 林志彦 李思翰
近年来机器人广泛应用在各种不同的领域中,移动机器人在军事、服务业以及高校教育等领域都有着重要应用。而目前大部分的机器人构形有较大的局限性。为了简化机器人设计、减少结构构件和降低机器人成本的同时,增强机器人系统性能、增加机器人功能和结构的多样性,本文采用CAN总线技术进行模块化设计,实现全方位移动的方案、运行性分析、定位系统以及硬件设计等方面讲述一款多功能基于CAN总线模块化的机器人底盘,增加机器人的适应能力,在复杂多变环境中也能实现全方位移动。
近年来,随着世界科技的发展进步,机器人底盘的智能化程度得到大幅度提高,但也存在一些不尽如人意的地方。如:精度不够,无法处理不规则形状物体,柔性控制欠缺等。本人基于CAN总线技术,实现全方位移动的方案的机器人底盘,增加适应能力,在复杂多变环境中也能实现全方位移动。
1 底盘结构
产品模块化设计的定义就是将目标产品的功能进行分析,再将这些特殊的要素组合构成单个具有目标功能的子系统,通过将这个子系统作为通用性的模块与其他子系统进行多种组合从而构成新的系统。
而机器人的整个底盘系统本身就是隶属机器人的一个子模块,本课题设计的通用底盘就是将底盘系统划分为独立的悬挂系统模块、驱动模块和车架模块。而目前适用于麦克纳姆轮独立驱动的轮组模式设计机构主要有横臂式悬挂机构、纵臂式悬挂机构、斜臂式悬挂机构以及柔性连接机构。横臂式悬挂能让车轮在上下运动时能自动改变外倾角并且减少轮距变化减少对轮子的摩擦,并且也能自适应路面,轮子贴地性好。由于Mecanum轮的耐磨性较差,所以横臂式悬挂系统更适合四轮独立驱动Mecanum轮结构的底盘,悬挂系统的可以调节减震器的角度来实现不同阻尼适应更多的底盘。针对不同的工作环境和需求,驱动模块可以更换不同的型号的电机匹配更多的底盘。车架模块则是安装电源、一些控制板、传感器和可二次开发的接口,如图1所示。
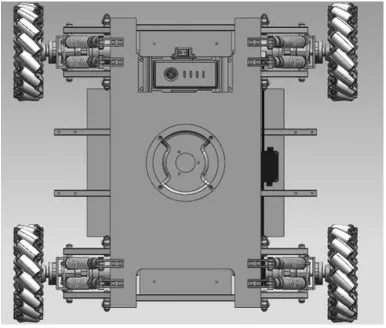
图1 独立悬挂式四轮底盘机器人
2 控制系统的硬件实现和can总线
2.1 控制器
机器人底盘是由驱动模块、车架模块等组成,机器人底盘要实现分布式控制,所以选用STM32F407IGHx作为主控制器。控制器利用CAN总线发送给电机所需要的的速度,利用PID比例算法让4个电机的速度相同,再然后用一定的定时器频率进行中断,使PID算法能在合理的频率下计算,令机器人可以进行直线运动。
2.2 CAN线协议控制器
can总线属于现场总线的范畴,也是近年来运用的较为广泛的总线技术之一。由于can总线技术的可靠性强,抗干扰能力强以及成本低廉,广泛应用在工业控制领域。在设计控制系统时运用模块化拆分结构和功能的设计方法,使用TJA1044GTK/3做为CAN的收发器。如图2所示。

图2 CAN协议控制器
2.3 稳压模块
稳压芯片选用TPS54540,TPS54540是由8个引脚组成,引脚1和引脚8之间需要一个自举电容器。如果该电容器上的电压低于最小值需要操作高端MOSFET,输出被关闭,直到电容器被刷新。引脚2是给芯片供电;引脚3是欠压锁使能引脚;引脚4接定时电阻用于控制开关频率的;引脚5是电压反馈引脚,引脚5的反馈回路接在输出和地之间通过改变反馈回路与输出还有反馈回路与地之间的阻值比,来调节输出电压。引脚6是频率补偿引脚用于补偿芯片内部的开关电流;引脚7和引脚9都是接地,引脚9同时还起到散热的作用;引脚8接的是开关MOS的输出;使用TI官方设计工具可得24V转5V的部分电路设计参数。如图3所示。

图3 稳压模块电路设计图
3 结论
在日常生活逐渐智能化的今天,各类机器人进入了我们的生活之中,对于机器人的功能要求也不断增加,工作情况也不断复杂。然而,就传统的机器人设计而言,设计、生产、制造以及后期维护升级等过程的成本不断变高。本文采用CAN总线技术进行模块化设计,实现全方位移动的方案、运行性分析、定位系统以及硬件设计等方面讲述一款多功能基于CAN总线模块化的机器人底盘,增加机器人的适应能力,在复杂多变环境中也能实现全方位移动。
