基于改进PSO-RBF神经网络的抽油机故障诊断
2021-03-01卫涵典洪诗益
刘 斌,吴 伟,卫涵典,洪诗益
(西安石油大学机械工程学院,西安 710065)
0 引言
由于科技高速发展,数字化油田发展也快速提高,抽油机的工况诊断在石油开采中逐渐受到石油专家们的关注,与此同时,抽油机工况诊断技术的研究也变得炙手可热。在过去的几十年中,国内外石油专家们一直在深入研究抽油机工况故障诊断技术,并取得了相当的研究成果,在许多油田中得到了具体的应用。在这些研究成果中,主要的故障诊断方法有5个:人工手动识别法、计算机诊断法、故障诊断专家系统、人工神经网络识别法和支持向量机识别法[1]。
这几类方法各有利弊,而本文采用的是人工神经网络识别法,基于RBF 神经网络是一种性能良好的前馈型神经网络,具有数据驱动、自主寻求数据中心的特点,被广泛应用于模式识别、故障诊断等众多领域[2]。但是RBF 神经网络参数训练存在训练速度慢、容易陷入局部最优值等问题[3],因此,本文提出了一种基于优化RBF 神经网络的抽油机故障诊断方法。
1 RBF神经网络模型
RBF 神经网络是前向三层网络。第一层是网络输入层,由信号源节点组成;第二层是网络隐含层,隐单元的数量由所需解决的问题决定,隐单元变换函数是对中心点径向堆成并且同时衰减的非线性非负函数;第三层是网络输出层,对输入做出相对应的响应[4]。由3 个不同层构成的传统RBF 神经网络的结构,如图1所示。
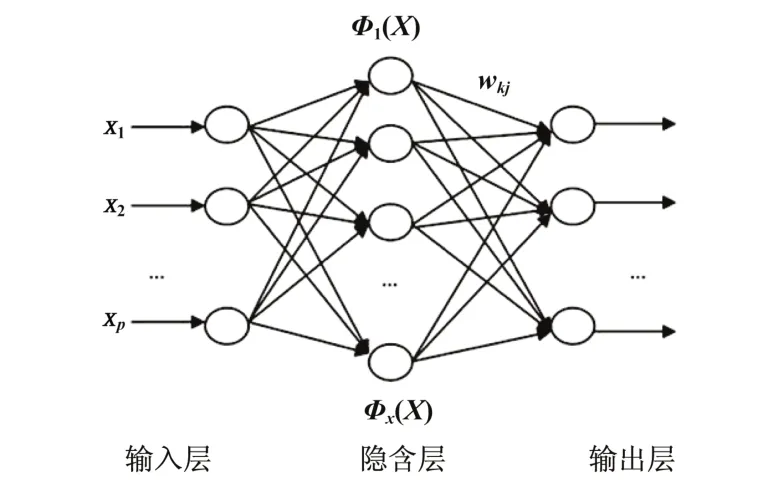
图1 RBF神经网络的结构
RBF 神经网络的基本思想:用RBF 作为隐单元的“基”构成隐含层空间,这样就可以将输入矢量直接映射到隐空间。当RBF 的中心点确定后,这种映射关系也就确定了。而隐含层空间到输出空间的映射是线性的,即网络的输出是隐单元输出的线性加权和。
RBF 神经网络中最常用到的核心函数为高斯函数,所以网络的激活函数如下:

RBF神经网络的输出为:

由式(1)~(2)可以得出,对RBF 神经网络模型性能影响的3 个初始参数有:中心点C、宽度δ以及隐含层到输出层的权值ω。因此针对这3个参数分别提出优化方法。
2 FCM算法和粒子群(PSO)优化算法
2.1 FCM算法
模糊C-均值聚类(FCM)是1973 年由Bezdek[5]提出的,是一种比较常用的聚类算法。通过优化目标函数算出每个样本点对所包括的类中心的隶属度,以此满足复杂数据集间的关联性[6]。假设n 个数据样本为X={x1,x2,…,xn},c为类别数目,各类别的聚类中心为{v1,v2,…,vc},每个样本属于每一类 Ak的隶属度组成了一个隶属度矩阵U,U={μik}∈Rc×n,i=1,2,…,c,k=1,2,…,n,为了保证每个样本都被划分,应该确保=1,则目标函数J可以用下式表达:

式(4)~(5)分别计算样本xi对于类Ak的隶属度μik和c个聚类中心{vi} :

用上述所提的式(4)~(5)重复的修改数据隶属度、聚类中心和进行分类处理,当算法收敛时,从理论上可以得到各类的聚类中心以及各样本对各个模式类的隶属度,完成对样本模糊聚类划分。该算法步骤如下。
(1)设置迭代次数t=1、最大迭代次数tmax、终止误差α。
(2)初始化聚类中心V0。
(3)用式(4)来更新隶属度矩阵U。
(4)用式(5)来更新聚类中心Vc。
(5)计算目标函数并判断上一次结果与当前结果的差是否小于误差α 或者t >tmax,若是满足其中一项,则停止循环;否则t=t+1,转至3。
2.2 PSO算法
粒子群算法是一种对鸟类觅食行为的研究算法,当鸟类寻找食物时,用最简单的方法就是寻找当前距离食物最近的鸟的周围地方。而在粒子群算法中,所谓“粒子” 就是每个优化问题的可能解,而每个粒子的特征可以通过3项指标来体现,分别为该粒子的适应度值、速度和位置。粒子在每次迭代过程中可以用适应度函数来计算该粒子的适应度值,其值的大小决定了粒子的优劣[7],也决定了当前解的好坏。粒子在每一次的迭代中,更新自身位置后计算自身适应度值,并在之后用自身适应度值与个体极值、群体极值的适应度值作比较,从而来决定是否需要更新个体和群体极值。最终可以得到全局最优解,也就是所求问题的最终解[8]。
设在K 维的搜索空间中,种群Q是由n 个粒子所组成,Q=(Q1,Q2,…,Qn),其中第i个粒子可以表示为一个K 维空间的向量Qi=(qi1,qi2,…,qiK)T,代表该粒子在K维空间中的位置。由目标函数可以计算得出每个粒子位置Qi所对应适应度值。
速度与位置分别用下式来表达:

式中:ω 为惯性权重;k 为当前迭代次数;c1和c2作为加速度因子且是非负常数;r1和r2是属于[0,1]区间的随机数值;Vi为第i个粒子速度;Pi为第i个粒子个体极值;Pg则为群体极值。
基本的PSO 算法存在“早熟”问题,即局部收敛不足,需要对其进行优化处理。研究PSO 算法基本原理,根据分析得出初始的3个参数ω、c1、c2起主要作用。当参数比较小的时候粒子搜索的空间不足,在全局收敛上并不突出,但是局部收敛性比较好,速度快;当参数比较大的时候算法的全局收敛性比较好,但在局部收敛上不足,并且搜索精度低、速度慢[9]。为了提高算法性并能兼顾全局与局部,基于此,Y.Shi等[10]提出了基于线性下降惯性权重的粒子群算法,该方法是让粒子群中的惯性权重因子从最大值线性减少到最小值。这种减少方式可以让粒子在进化早期,ω 的值较大时,使其具备较好的全局搜索能力;而在进化后期,ω 的值变小时,让其具备较强的精细局部搜索能力[11],可以兼顾到整个寻优过程。
线性下降惯性因子的变化公式为:

式中:ωmax为惯性因子最大值,本文中ωmax=0.9 ;ωmin为惯性因子最小值,本文中ωmin=0.4 ;iter为当前迭代次数;itermax为最大迭代次数。
3 改进PSO-RBF网络算法流程
具体算法流程如下。
(1)设计RBF 神经网络结构,本文中网络输入层节点数为6,网络输出层节点数为9。根据2.1节中心参数优化方法,利用FCM算法进行中心c计算。
(2)初始化参数,参数包括RBF 神经网络宽度δ 以及权值ω,并设定结束迭代误差。
(3)将这些参数组合起来就构成了粒子的位置参数。在初始化参数时,要初始化粒子数目N、粒子的位置Xid、速度Vid等,这些参数采用随机方式赋初始值。
(4)更新粒子的速度和位置。根据式(6)和式(7)来更新粒子的速度和位置。
(5)计算粒子适应度。用均方误差作为RBF 神经网络的目标函数[12],该函数即为PSO 算法的适应度函数。
(6)更新粒子极值和全局极值。以步骤(5)计算出的适应度值来判断是否需要更新粒子的最优解以及全局最优解。
(7)判断是否结束迭代。若均方误差小于设定的值或当迭代次数等于或大于最大迭代次数,满足其中任意条件则停止迭代,否则回到步骤(4)。
(8)结束迭代。所求的解即为全局最优解。
根据上述步骤,可以画出RBF优化流程图如图2所示。
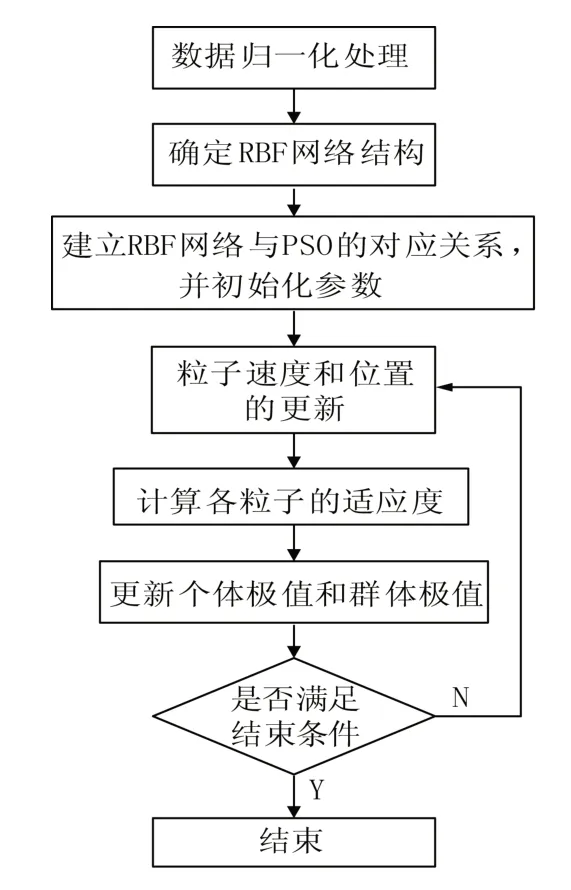
图2 RBF网络优化流程图
4 仿真分析
本文实验对9类常见抽油机工况进行诊断,具体包括:正常、固定凡尔漏失、游动凡尔漏失、杆断、出砂、结蜡、活塞碰泵、进气、未充满气,共327 组数据。其中300 组数据作为训练样本,每个类型留取3个作为检验样本。
首先对示工图数据做灰度化和归一化处理[13],提取示工图特征值,以6个特征值作为神经网络输入向量,而对应的输出值为0~8,分别对应上述9种抽油机工况。
利用300组样本构成的训练数据集,按照第3节所述的训练流程对RBF 神经网络进行训练,设定的种群粒子数N=40,加速因子c1=c2=2[14],其中最大迭代次数设定为400次。
为了对比本文所提方法的有效性和可行性,本文对比模型为传统RBF 神经网络模型和Kmeans-RBF 神经网络模型。将这3 种方法在同等条件下进行比较,对比这3 种方法的误差率以及诊断时间。
图3~5 分别为FCM-PSO-RBF 神经网络、Kmeans-PSO-RBF神经网络以及传统梯度下降法RBF神经网络的误差。
通过对比以上3 个图,FCM-PSO-RBF 神经网络模型在50步后误差值趋向于平稳,且误差在0.055左右。Kmeans-PSO-RBF 神经网络模型在大概70 步后才大概趋向于平稳,且误差值在0.055~0.060 之间,而传统RBF 神经网络模型在100 步后才趋向于平稳,且误差值在0.143左右。
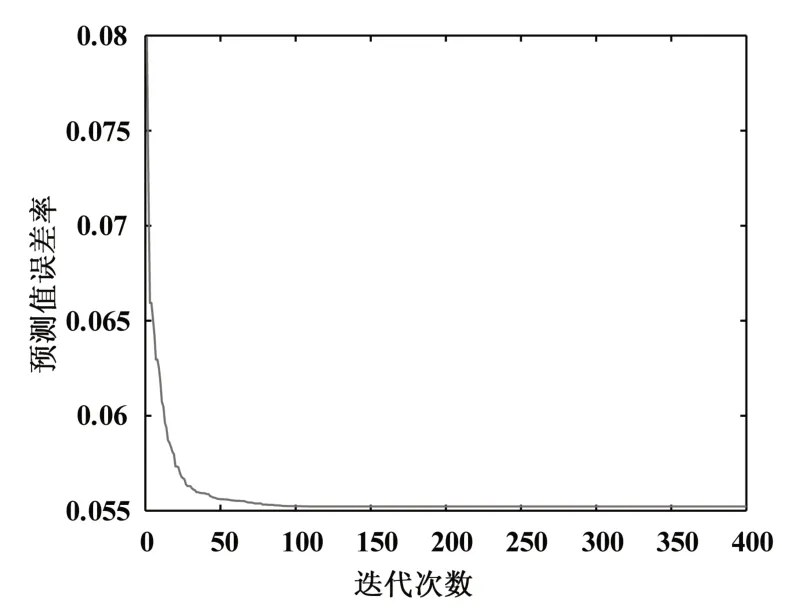
图3 FCM-PSO-RBF预测值误差

图4 Kmeans-PSO-RBF预测值误差
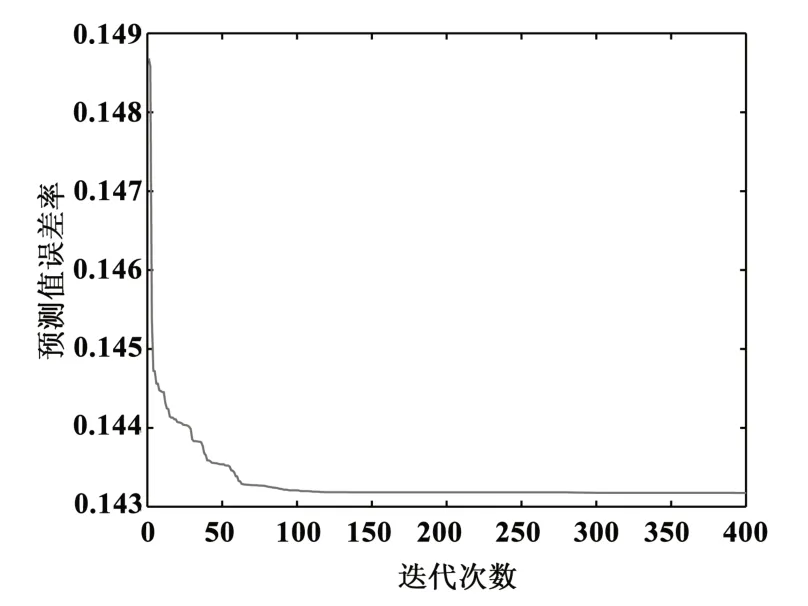
图5 传统RBF预测值误差
因此,由上述说明来看,改进FCM-PSO-RBF神经网络与Kmeans-PSO-RBF 算法与传统RBF 神经网络的预测值误差的差距还是比较明显的,误差越大则预测精度越低。这3 种模型中,以传统RBF神经网络模型算法性能最低;其次为Kmeans-PSO-RBF 神经网络模型算法;而本文所提FCM-PSO-RBF 神经网络模型算法性能最好。预测结果显示:FCM-PSO-RBF 预测正确率为84%,Kmeans-PSO-RBF 预测正确率为80%,传统RBF 预测正确率为66%。
5 结束语
本文针对RBF 神经网络的局限性,利用FCM 算法优化其过分依赖于隐含层数据中心的选取和改进PSO算法对影响RBF网络性能参数进行优化改进,从而在整体上改善了RBF 神经网络的性能。建立了抽油机工况诊断的RBF网络模型,与其他2个网络模型做对比实验。实验结果表明,FCM-PSO-RBF神经网络在性能和预测准确率上优于传统RBF 神经网络和Kmeans-PSO-RBF神经网络。
