基于PLC的水泥库筒仓清理机器人系统设计
2021-03-01胡志通公续银
胡志通,公续银,赵 建
(济南大学机械工程学院,济南 250022)
0 引言
水泥库筒仓因遇水凝结、长时间存储等原因形成积料和结皮挂在筒仓内壁上,这些积料和结皮会成块或成片落到库底,轻者会减少有效库容,重者则会堵死下料器,严重影响水泥企业正常生产。人工清理库内积料的方式效率低下,且极易引发质量事故[1]。筒仓清理机器人取代人工清库作业,具有自动化程度高、施工人员少的优点,提高了清洁效率,保障生产操作的安全性,满足企业的迫切需要[2]。
水泥库筒仓的清库需求是伴随仓库、筒仓在工业内的大量应用而出现的。目前市场上面对储煤仓、石料仓等流动条件差或者粘滞性大的物料的板结堵塞,仍然以使用空气清堵器(空气炮)、激振器、筒仓内壁振动器、铲料器等为主要处理方法[3-6]。利用PLC 控制技术,设计自动化清理筒仓的功能和检测系统实时反馈的功能,摆脱人工入库清理的局面[7-8]。
1 系统总体设计
水泥库库壁清理机器人的机械结构分为:上部固定底座、竖直支撑臂、水平工作臂、末端执行机构、上部卷扬机构等。
上部固定底座安装在水泥库顶部,固定在库顶中心位置。库顶中心孔按需要可开60×60范围孔,便于安装。竖直支撑臂安装在上部固定底座上,从库顶开孔处进入库内,末端链接水平工作臂。水平工作臂由多组小工作臂装配拼接而成,能够根据水泥库的库内直径灵活配置工作臂的长度。水平工作臂末端安装有方向导轮,引导橡胶软管竖直向下放送。
上部卷扬机构安装在上部固定底座上,分为两部分:工作臂提升机构和末端执行器提升机构。工作臂提升机构由牵引电机和卷扬机组成,卷扬机输出钢缆与水平工作臂上固定孔相连,通过牵引电机带动卷扬机,实现钢缆的收放动作,完成对水平工作臂的姿态角度控制。末端执行器提升机构安装在上部固定座前部,由卷扬机和提升电机组成,提升电机动作后带动橡胶管卷扬机旋转,带动橡胶管上下运动。
末端执行机构主要由高速电机和甩动鞭链组成。整个末端执行机构安装在橡胶软管的末端并固定,能够随着提升机构工作而上下移动,实现库内全面清理积料。橡胶软管内包含电源线和信号线,高速电机连接在橡胶软管中电源线上,实现高速旋转,带动外部的甩动鞭链猛烈碰撞库壁积料,完成区域的清理工作。当一处积料清理完成后,整个机械结构协同工作,完成末端执行器的移动,到达下一片区域开始清理工作。
对水泥库库壁清理的过程进行分析,其清理库壁挂料的过程主要包括了机器设备本体安装、设备入库调试、设备工作清理、设备出库等方面的内容。在库壁清理机器人工作过程中,需要保障上述工作自动化、高效率的完成,根据这些要求设计水泥库库壁清理机器人总体系统如图1所示。图中,上位机作为人机交互界面,连接PLC 作为控制中心,控制机器主体完成末端执行系统的动作,并处理反馈信号给上位机,构成闭环控制,组成整个控制系统。

图1 总体系统组成图
2 控制系统设计
采用PLC 作为总控制器,控制执行机构运行,处理传感器信号。如图2 所示,PLC 作为控制中心,主要分为3个部分的控制:一是机器人本体姿态的控制;二是末端执行器控制;三是控制传感器信号接受与发送。3 个部分的数据最终由上位机控制台处理,工作指令再次反馈到PLC 控制器,完成整个闭环控制。

图2 控制系统总流程图
如图3所示,库壁清理机器人的姿态控制主要包括主体支架水平电机的控制和工作臂提升电机的控制,两个电机协作配合,使机器人能够将末端执行器运送到指定位置。主体支架水平电机为步进电机,通过PLC 发送脉冲数控制其旋转,并由光电编码器记录旋转角度,旋转指定角度后,主轴停止并抱死。工作臂提升电机为大功率三相异步电机,牵引卷扬机构转动,由人工监控工作臂姿态,到达工作角度后保持并进入抱死状态。

图3 姿态控制流程图
末端执行器的控制分为两个方面,如图4 所示。电缆牵引电机控制电缆的伸出长度,使末端执行器刀头顺利地下放或上升,而末端执行器旋转电机则为刀头提供旋转动力。根据库内积料和结皮的厚度,调节旋转电机的转速,达到最佳碰撞效果。
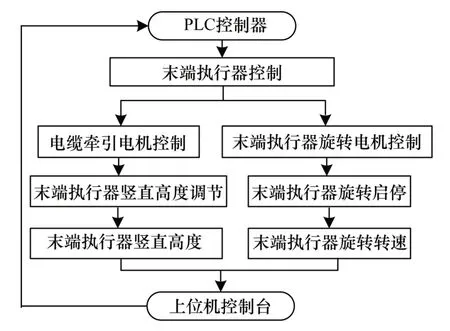
图4 末端执行器控制流程图
如图5所示,检测系统的控制分为多个方面:一是云台摄像机的控制,由于工作环境恶劣且障碍物较多,要求能够自适应调整摄像头角度,同时防止受灰尘污染;二是照明机构的调节,照明机构须具有一定跟随动作,跟随摄像头的方向,为摄像头提供明亮的光照环境;三是工作臂末端的距离感应器控制,距离感应器能够探测出工作臂末端与库壁的距离,从而保持工作臂与库内壁较小的间隙,使末端执行器刀头在水平方向有效地碰撞水泥结皮。三维成像传感器采用激光雷达作为主要传感器,通过串口通信将扫描信号传输到控制台,由控制台生成库内积料地图。辅助控制人员分析库内清库进程,进一步控制末端执行器完成清库过程。

图5 传感器信号接受与处理流程图
3 检测系统设计
库壁清理机器人的检测系统主要负责检测库内的末端执行器刀头运转情况,为库顶或地面的控制台提供清晰的清库进展细节,使操作人员能够顺利控制清理机器人完成库壁清理任务。为完成以上任务,库壁清理机器人的检测系统由以下部分组成:云台、末端距离感应器、照明机构、终端控制台等。
根据机械系统设计,照明机构和云台安装在竖直臂的下部,视频信号线和电源线从竖直臂的内部穿入,最终连入PLC和控制台。PLC控制照明机构的开关以及亮度调节。控制台接受视频信号,显示在工控屏幕上,为控制人员呈现库内清理细节。而距离感应器安装在末端导轮的下方,用来检测末端臂与水泥库内壁挂料的距离,并反馈给控制台,调整工作臂的角度和末端电动缸的工作距离。末端距离感应器采用机械式接近开关,具有良好的环境适应性,在库内粉尘环境下能够稳定工作。通过PLC 将末端距离感应器的信号发送到终端控制台,控制台对信号进行计算处理,从而不断调整清理机器人的整体姿态,实现高效自主清理。检测系统的安装位置图如图6所示。
4 结束语
本文通过对水泥库筒仓清理机器人控制系统进行设计,实现了对机器人姿态控制、末端执行器控制和传感器信号处理。以PLC 为控制中心,设计机器人的姿态控制流程和检测系统处理流程。
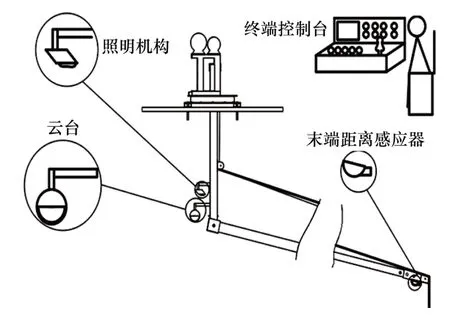
图6 检测系统设计图
基于PLC 的水泥库筒仓清理机器人控制系统用于取代人工清库作业,保障清库工人生命安全。为水泥生产企业带来高效、易操作的清库设备,提高水泥筒仓的有效容积。对于保障企业安全生产和持续生产具有重要利用价值和现实意义。
