汽车无刷直流电动机的控制策略研究*
2021-03-01赵婷
赵 婷
(滨州学院,山东滨州 256600)
0 引言
汽车作为日常生活和工程中不可或缺的商品,正朝着低功耗、节能方向发展,进而促使了新能源汽车的发展和应用。电动机作为汽车的重要元件,其控制策略对于汽车的稳定运行和节能效果均有着关键的影响[1]。车载无刷直流电机的控制因素主要包括速度和电流两方面。在闭环反馈的条件下,可实现较为稳定的控制[2]。但在某些特殊条件下,控制器的电信号仍可能会出现显著的波动性,进而使得电机的扭矩出现异常[3],造成电机驱动出现剧烈抖动、过热等问题。
为了解决该问题,本文以车载供水控制器为研究对象,对电机的控制方案进行研究,以便获取最佳的速度和电流控制策略。
1 车载电机启动控制策略
对于电机的精确控制,要求对转子位置进行实时监测。一般情况下,有的无刷直流电机装有位置传感器,可获取车载电机启动时的相关工作参数。对于没有位置传感器的电机,其转子运动学特性的监测也是必要的。但是,由于车载电机在启动过程中,其初始转速和反向电压均为非常小的值[4]。因此,若采用反向电压检测的方法来确定电机转动特性难以实现。在该种情况下,只有达到一定转速后才能获取准确的电压信号。为此,可采用过零点反电动势的三段式启动方法。
当电动机输入启动信号时,初始时刻的转子位置处于未知状态,因此需要设置一个参考点位置,当转子处于该位置(转子对齐)时确定其后续的运动特性,此外,还需确保电机正常启动,即保持一定的电磁转矩。
转子对齐需要一定的通电流程,即需要先对两相绕组输入电流,第三相绕组暂时断路。这两相被通电的绕组在电流作用下,将产生一定的电枢磁动势,此时,转子在该作用效果下,将自动实现磁势相对对齐,整个过程如图1所示。转子的运动受两相绕组的影响,在绕组的通电瞬间,磁势方向和转子位置具有明显的偏差,经过特定的时间间隔后(一般不超过1 s),两者位置达到一致。
当电机转子的对齐和定位操作完成以后,其本身所产生的反电动势和自身转速均为较小的数值,若采用零点反电动势方案进行数据检测,进而完成换向调节尚不能保证其可靠性。因此,需要保持一段时间,在经历这段时间后,电机可以稳定输出反电动势。为此,可在转子端设定一个计时器,通过开环控制以确保电机转速的控制。比如,当电机开始执行启动任务时,计数器进行递减计数,待转子的转速和自身产生的电动势达到设定值时,即可检测出稳定数值,并立刻进行换向动作。
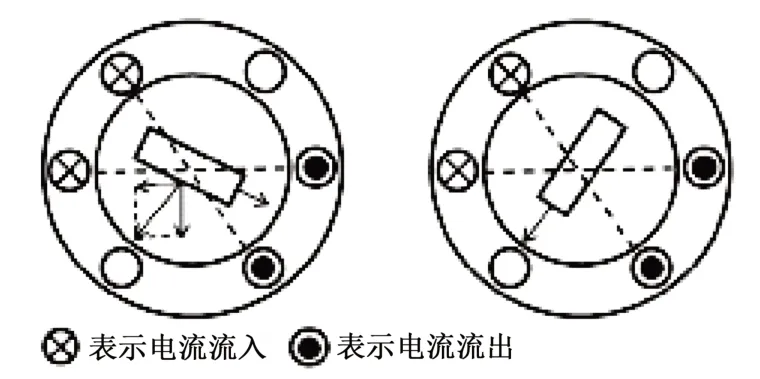
图1 转子对齐原理
车载无刷直流电动机在启动时,某些情况下会遇到启动失败现象。一般地,产生启动故障的主要原因有两个:一是转子的阻力力矩(负载)过大,绕组线圈产生的驱动力矩无法完成电机启动;二是绕组电流出现问题,无法实现换向操作。在工程上,若由于负载问题造成的驱动故障,可调节PWM占空比的数值。合理的数值有利于电机一定程度的软启动效果,确保电机工作稳定性。
2 速度电流闭环控制策略
2.1 工作原理
在电机控制策略中,PID已经具备良好的应用条件。目前,PID 控制策略经过多方面和层次的发展,逐渐趋于框架简单化、参数易控制化等方向,在当代的控制策略中属于柔性较高的算法,在工业和工程控制中具备较高的应用率[5]。在车载无刷直流电动机的PID控制策略中,其控制流程如图2所示。可以看出,整个PID控制的主要内容要求明确目标参数值和被采集数值之间的差值。根据PID 控制的工作原理,可得出不同环节的控制方法。
(1)比例环节。比例控制环节主要用于调整目标参数值和被采集数值之间的偏差。当控制系统通过反馈得出偏差数值时,在比例环节控制下,能够增加或减小输出。
(2)积分环节。积分环节主要用于静态误差的消除。在实际控制过程中,可通过积分作用大小的调节,最终实现静态误差强弱的控制。
(3)微分环节。微分环节的控制效果主要体现在误差范围的调整,这对于偏差的修正有着重要的作用,也是促进控制器快速工作的基本环节。在PID控制中,只有合理地选用各个环节才能获取最佳的控制效果。这不但利于电机控制精度,还能确保控制效率。

图2 PID控制原理
2.2 温度传感器转速控制
车载无刷直流电机的重要输出端为水泵,实现空调温度的调节。在不同的户外温度条件下,采用合理的控制策略实现电机的高效控制是节能降耗的重要手段[6]。汽车在不同的行驶状态,车载无刷直流电动机所处的工作条件显著不同。因此,车内水泵的负载也需要随着电动机的控制而发生变化。比如,当水泵处于持续的高负荷运行条件时,若电机转速匹配不合理,将导致电机浪费大量的机械能。电机转速的合理调节不但有利于车内温度的快速调节,同时也有利于水泵负载的合理运用,以便达到节能降耗的目的。为此,可采用温度传感器对转速进行反馈控制。
若温度传感器检测到车内水泵的温度较高时(超过50 ℃),此时的水泵需要提升其功率状态,否则难以满足功能需求。因此,可将水泵的转速提升至4 000 r/min。这样一来,能够有效地确保空调系统内的换热器件稳定运行。为实现节能减排的目的,可根据温度传感器实时调节转速。如当水温开始下降,低于45 ℃时,可将水泵电机转速降至3 000 r/min。通过温度的反馈控制,能够在满足空调系统正常工作的条件下,大大减少机械能的浪费。根据工程实践可知,基于温度控制转速的方法,存在温度的回滞现象。如图3所示,当温度检测在42~44 ℃时,水泵的负载有一个相对明显的突变。因此,在转速调节时,需要考虑该回滞现象,即转速的控制需要存在一定的延迟,否则控制效果会不显著。

图3 温度回滞特性图
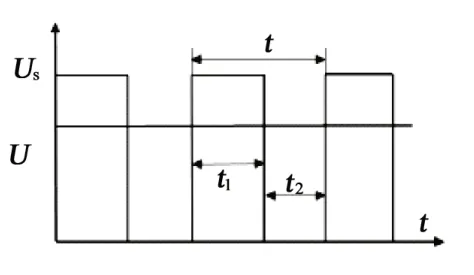
图4 脉冲宽度调节原理
2.3 占空比转速控制
占空比转速控制主要基于PWM 的调节而实现。PWM 为脉冲宽度调制,其工作原理为通过中央处理器的数字化控制手段完成电子电路导通和断开的控制[7]。在该控制策略条件下,便于根据输入波形的占空比来实现电动机转速的控制。从本质上讲,占空比调节的主要目的为电机输入波形的宽度控制,其控制原理如图4所示。
脉冲宽度调制可通过脉冲极性差异性进行分类,主要包括单极性、双极性等。两者之间具有显著的差别,特别是倒向电路的调整,双极性模式可直接对三角波形进行调制。车载无刷直流电动机的PWM 控制易于实现,可通过电控系统的设计实现各个电子器件的数字信号控制。在占空比控制条件下,输入脉冲信号的宽度能够约束对应的电枢电压,通过电压大小的调节,进而实现电机转速的控制。该控制策略具有特定的优势,比如,车载电机在不同的运行条件下,水泵的转速可保持稳定。由于占空比转速控制易于实现,灵活性非常高,在很多新能源汽车上有着广泛的应用。
3 结束语
车载无刷直流电动机在PID控制条件下,其启动稳定,电机转子磁势相对对齐的时间为100 ms,通过开放性速度调节,可使得电机快速完成启动,零点反电动势检测的可靠性良好。基于温度传感器和占空比控制的转速调节,在节能降耗方面均有着良好的控制效果。车载无刷直流电机在合理的控制策略下,不但能够有效地保护电机自身的电子器件,避免电流超载,同时能够实现速度的准确、合理调节。
